You might also like
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- SOC2 Compliance Handbook 2017Document9 pagesSOC2 Compliance Handbook 2017nanojacketNo ratings yet
- Applying PSS GenConceptsDocument30 pagesApplying PSS GenConceptsAnonymous 1880JHcGNo ratings yet
- 12 796 and 798 Update - Jeff - 20nov18Document17 pages12 796 and 798 Update - Jeff - 20nov18tatiana100% (1)
- Template 2 PIA Report Part 2 Appendix ADocument14 pagesTemplate 2 PIA Report Part 2 Appendix AJhong100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Wipro Offer LetterDocument14 pagesWipro Offer Lettertapan kumar singhaNo ratings yet
- Chapter 4 PDFDocument62 pagesChapter 4 PDFMuhamad AmmarNo ratings yet
- Scalar Speed Control of Induction MotorsDocument21 pagesScalar Speed Control of Induction MotorsRami100% (1)
- Sensorless FOC of ACIDocument43 pagesSensorless FOC of ACIdimitaringNo ratings yet
- TICO Pro Spotter Repair Manual 1Document211 pagesTICO Pro Spotter Repair Manual 1Ivailo Zapryanov0% (1)
- Mitigation of Sub Synchronous Oscillations in ADocument7 pagesMitigation of Sub Synchronous Oscillations in ARamesh GosuNo ratings yet
- Vgabeto OBLICON-003: Aclc College of TaclobanDocument11 pagesVgabeto OBLICON-003: Aclc College of Taclobanjumel delunaNo ratings yet
- Earthing Transformers For Power SystemsDocument11 pagesEarthing Transformers For Power Systemsanoopk222100% (1)
- Improvement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizerDocument4 pagesImprovement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizereditorijsaaNo ratings yet
- Networking Straight-Through and Cross OverDocument25 pagesNetworking Straight-Through and Cross OverJan GolimanNo ratings yet
- Kingsbridge Armory Request For Proposals 2011 FF 1 11 12Document54 pagesKingsbridge Armory Request For Proposals 2011 FF 1 11 12xoneill7715No ratings yet
- A Survey of Speed and Flux Control Structures of SDocument25 pagesA Survey of Speed and Flux Control Structures of SKutuzovkiNo ratings yet
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDocument8 pagesSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzNo ratings yet
- Energy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function AnalysisDocument12 pagesEnergy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function Analysismalini72No ratings yet
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- Vector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterDocument11 pagesVector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterKushagra KhamesraNo ratings yet
- Cascaded Three-Level Inverters With Synchronized Space-Vector ModulationDocument8 pagesCascaded Three-Level Inverters With Synchronized Space-Vector ModulationkalimaheshwariNo ratings yet
- Nonlinear Control of Active Magnetic Bearings A Backstepping Approach Marcio S. de Queiroz and Darren M. Dawson, Senior Member, IEEEDocument8 pagesNonlinear Control of Active Magnetic Bearings A Backstepping Approach Marcio S. de Queiroz and Darren M. Dawson, Senior Member, IEEEVu MinhNo ratings yet
- Extended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionSohibul HajahNo ratings yet
- Operational Stability Enhancement Analysis of A Transverse Flux Linear Switched-Reluctance MotorDocument4 pagesOperational Stability Enhancement Analysis of A Transverse Flux Linear Switched-Reluctance MotoraaparumugamNo ratings yet
- Ans AssignmentDocument2 pagesAns AssignmentIsaakNo ratings yet
- Optimal Torque Control of The Externally Excited Synchronous MachineDocument10 pagesOptimal Torque Control of The Externally Excited Synchronous MachinescrandNo ratings yet
- Numerical Analysis On Torque Motor Dynamics Used inDocument13 pagesNumerical Analysis On Torque Motor Dynamics Used inSharan AnnapuraNo ratings yet
- Control System of The Wiredrawing Machine1Document8 pagesControl System of The Wiredrawing Machine1Vadim CazacNo ratings yet
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDocument15 pagesSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNo ratings yet
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Modeling and Simulation of A Soft-Starter For A 2 MW Wind Turbine GeneratorsDocument6 pagesModeling and Simulation of A Soft-Starter For A 2 MW Wind Turbine GeneratorsBaban VladNo ratings yet
- 2.2.2 Circuit Coupled FEMDocument11 pages2.2.2 Circuit Coupled FEMgurunathan14No ratings yet
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalNo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Space Vector Flux Weakening Control of PMSM DriverDocument8 pagesSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNo ratings yet
- Continuous Space Vector Modulation For Symmetrical Six-Phase DrivesDocument12 pagesContinuous Space Vector Modulation For Symmetrical Six-Phase DrivesSherif M. DabourNo ratings yet
- Fem PWM Inverter MaxwellDocument15 pagesFem PWM Inverter MaxwellBala KrishnanNo ratings yet
- Simulation of D-Q Control System For A Unified Power Flow ControllerDocument10 pagesSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNo ratings yet
- Introdução VariaçãoDocument6 pagesIntrodução VariaçãoTravis GrayNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- High-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoDocument9 pagesHigh-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoDoru DumitracheNo ratings yet
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocument12 pagesDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250No ratings yet
- Direct Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachDocument4 pagesDirect Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachKushagra KhamesraNo ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Control Analysis of A Switched Reluctance MotorDocument9 pagesControl Analysis of A Switched Reluctance MotorДејан ПејовскиNo ratings yet
- MATLAB in Model-Base Design For Slip Energy Recovery of Induction MotorDocument6 pagesMATLAB in Model-Base Design For Slip Energy Recovery of Induction Motorsanjay kumar yadavNo ratings yet
- 244 1 AhmedSalmanDocument8 pages244 1 AhmedSalmanSalman AhmedNo ratings yet
- 1, March 47: of ForDocument8 pages1, March 47: of Forcarlos gomez reyesNo ratings yet
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocument6 pagesInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNo ratings yet
- 053 Ferreira FinalDocument15 pages053 Ferreira Finalluis900000No ratings yet
- Controlled Three Phase DrivesDocument160 pagesControlled Three Phase Drivesakoca23No ratings yet
- Enhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorDocument6 pagesEnhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorMahendiran CrNo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Document6 pages2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467No ratings yet
- The Velocity Control of The Electro-Hydraulic Servo SystemDocument7 pagesThe Velocity Control of The Electro-Hydraulic Servo SystemInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 pagesApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilNo ratings yet
- Self Tuning Control of Wind Turbine Using Neural Network IdentifierDocument13 pagesSelf Tuning Control of Wind Turbine Using Neural Network IdentifierAlla SapronovaNo ratings yet
- Im Cordinate Csi CNTRLDocument11 pagesIm Cordinate Csi CNTRLsandeepbabu28No ratings yet
- PSSEDocument6 pagesPSSESyed Faizan AliNo ratings yet
- Speed Control of DC MotorDocument10 pagesSpeed Control of DC MotorYadira RocanoNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Pedagogical Solution ClassDocument2 pagesPedagogical Solution Classanoopk222No ratings yet
- Job ListingDocument31 pagesJob Listinganoopk222No ratings yet
- Preparation of Papers in Two Column Format For The ISEC 2011 ConferenceDocument4 pagesPreparation of Papers in Two Column Format For The ISEC 2011 Conferenceanoopk222No ratings yet
- New Doc 5Document10 pagesNew Doc 5anoopk222No ratings yet
- Online Application FormDocument3 pagesOnline Application Formanoopk222No ratings yet
- JournalDocument4 pagesJournalanoopk222No ratings yet
- Automatic Overload Protection System: Mini Project Report Submitted in The Partial Fulfillment of The Award of The DegreeDocument36 pagesAutomatic Overload Protection System: Mini Project Report Submitted in The Partial Fulfillment of The Award of The Degreeanoopk222No ratings yet
- Electric Motor Speed Control System With Clockwise and Anti-Clockwise DirectionDocument3 pagesElectric Motor Speed Control System With Clockwise and Anti-Clockwise Directionanoopk222No ratings yet
- Smart Skin For Machine HandlingDocument36 pagesSmart Skin For Machine Handlinganoopk222No ratings yet
- Infraredplasticsolarcell Eeerulez Blogspot in 120218052009 Phpapp02Document10 pagesInfraredplasticsolarcell Eeerulez Blogspot in 120218052009 Phpapp02Niranjan NiruNo ratings yet
- DSP AssignmentDocument8 pagesDSP Assignmentanoopk222No ratings yet
- SwotDocument3 pagesSwotRepala PraveenNo ratings yet
- Solved Determine The Combined Present Value As of December 31 2018Document1 pageSolved Determine The Combined Present Value As of December 31 2018Anbu jaromiaNo ratings yet
- JMR June2014IssueDocument72 pagesJMR June2014IssueErick GarciaNo ratings yet
- Battle Ship LabDocument1 pageBattle Ship Labapi-276688928No ratings yet
- Submission Record (15.06.2022)Document14 pagesSubmission Record (15.06.2022)Kunal GoutamNo ratings yet
- HSG Lop 11 2022-2023 KEYSDocument7 pagesHSG Lop 11 2022-2023 KEYSHà Trần Thị ThuNo ratings yet
- Mechanics of Solids-II MEC-206ADocument3 pagesMechanics of Solids-II MEC-206AManish KumarNo ratings yet
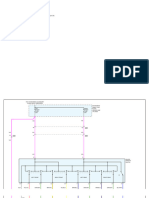
- DIAGRAMA-ventanas Electricas SparkevDocument3 pagesDIAGRAMA-ventanas Electricas SparkevHarvey LaresNo ratings yet
- Volatile Matter - Technical Visit ICC 2023Document8 pagesVolatile Matter - Technical Visit ICC 2023ICC Independent Cement ConsultantsNo ratings yet
- 3UG46161CR20 Datasheet enDocument6 pages3UG46161CR20 Datasheet envoNo ratings yet
- Application of TCSC To Enhance Power Transfer CapabilityDocument20 pagesApplication of TCSC To Enhance Power Transfer Capabilitykubera uNo ratings yet
- Car and Driver Buyer's Guide 2010Document151 pagesCar and Driver Buyer's Guide 2010killjoymsfNo ratings yet
- Divorce Bill Presentation (Revised)Document9 pagesDivorce Bill Presentation (Revised)Budz MarataNo ratings yet
- Blood Bank Management SystemDocument4 pagesBlood Bank Management SystemIJARSCT JournalNo ratings yet
- Auditing Theory 2nd Sem PrelimsDocument6 pagesAuditing Theory 2nd Sem PrelimsAccounting MaterialsNo ratings yet
- Roles Responsibilities A Handbook For CGST OfficersDocument64 pagesRoles Responsibilities A Handbook For CGST OfficersHr legaladviserNo ratings yet
- Internship ReportDocument54 pagesInternship ReportAparnaNo ratings yet
- Uba10-11 SS 27851 Id003 ArgDocument8 pagesUba10-11 SS 27851 Id003 ArgJorge BeltranNo ratings yet
- Factorytalk View Studio: Manually Removing An Application From Existing Application ListDocument3 pagesFactorytalk View Studio: Manually Removing An Application From Existing Application ListAndrea CupelloNo ratings yet
- Effect of Industrial Effluents On StreamsDocument13 pagesEffect of Industrial Effluents On StreamsHarsha OjhaNo ratings yet
- Pakistan's Investment Climate: The Way ForwardDocument9 pagesPakistan's Investment Climate: The Way ForwardInstitute of Policy StudiesNo ratings yet
- Electronic Theses and Dissertations (Etds)Document208 pagesElectronic Theses and Dissertations (Etds)jasimnddNo ratings yet