You might also like
- GSP-810 Service - Manual - 020319 - RSDocument98 pagesGSP-810 Service - Manual - 020319 - RSsystemlocNo ratings yet
- ECE 301 Electronics 1: A. Half-Wave RectificationDocument24 pagesECE 301 Electronics 1: A. Half-Wave RectificationVince Hugo GutibNo ratings yet
- Rectifier Lab ReportDocument7 pagesRectifier Lab ReportRupin Mathur0% (2)
- ECE2201 Lab Report 7Document9 pagesECE2201 Lab Report 7Raihan JannatiNo ratings yet
- Activity On Diode Waveshaping Circuits Group2 PDFDocument15 pagesActivity On Diode Waveshaping Circuits Group2 PDFRaymund TanapNo ratings yet
- SoundGrid DriverDocument14 pagesSoundGrid DriverThechany VeraNo ratings yet
- DWDM WDM CWDMDocument111 pagesDWDM WDM CWDMMehboob KhokharNo ratings yet
- The Right Half Plane ZeroDocument6 pagesThe Right Half Plane ZeroPhạm Văn TưởngNo ratings yet
- Ade NotesDocument128 pagesAde NotesKiranmai KonduruNo ratings yet
- Fig. 1.2. Connection of Positive ClipperDocument15 pagesFig. 1.2. Connection of Positive ClipperElle GabrielNo ratings yet
- UNIT 1-DC Power SupplyDocument30 pagesUNIT 1-DC Power SupplyMuizz ZainolNo ratings yet
- Pulse and Digital Circuits Lab MANUAL ONLY FOR REFERENCE: Linear Wave Shaping AimDocument78 pagesPulse and Digital Circuits Lab MANUAL ONLY FOR REFERENCE: Linear Wave Shaping AimAditya SusurlaNo ratings yet
- Half Wave RectifierDocument4 pagesHalf Wave RectifierrodinooNo ratings yet
- Of Loop AC: Design Feedback in Unity Power Factor To DC ConverterDocument9 pagesOf Loop AC: Design Feedback in Unity Power Factor To DC ConverterEjaz AhmedNo ratings yet
- Ac Fundamnetals ManualDocument12 pagesAc Fundamnetals ManualRaj Mehra MeharNo ratings yet
- Diode Wave Shaping Circuits: Course - Section: - ECE20L-2 / E06 Group Number: Group MembersDocument16 pagesDiode Wave Shaping Circuits: Course - Section: - ECE20L-2 / E06 Group Number: Group MembersLuch ÜNo ratings yet
- Experiment 5 Integrator, Differentiator and Non-Linear Properties of OpampsDocument7 pagesExperiment 5 Integrator, Differentiator and Non-Linear Properties of OpampsEnes AyduranNo ratings yet
- Unit 1 NotesDocument33 pagesUnit 1 NotesAer ZNo ratings yet
- Public A CaoDocument23 pagesPublic A CaoShaheer DurraniNo ratings yet
- Lic Dec 2018 Ans PDFDocument24 pagesLic Dec 2018 Ans PDFVaibhavNo ratings yet
- Stable Pulse Generator Uses Matched Transistors in A Current MirrorDocument6 pagesStable Pulse Generator Uses Matched Transistors in A Current MirrorDerek RamosNo ratings yet
- N. Bacalso Avenue, Cebu City: Cebu Institute of Technology - UniversityDocument15 pagesN. Bacalso Avenue, Cebu City: Cebu Institute of Technology - UniversityTreyes RobertNo ratings yet
- Fig. 1.2. Connection of Positive ClipperDocument11 pagesFig. 1.2. Connection of Positive ClipperElle Gabriel100% (1)
- Lecture 3 (Analogue Electronics I)Document7 pagesLecture 3 (Analogue Electronics I)amash.emillyNo ratings yet
- ClippersDocument16 pagesClippersvaisamNo ratings yet
- ECE20L - 2 - Expt3Document17 pagesECE20L - 2 - Expt3Niko de LemosNo ratings yet
- Yasin Half Wave Full WaveDocument10 pagesYasin Half Wave Full Wavemd yasin hasanNo ratings yet
- Chapter 2 Part-dIIDocument60 pagesChapter 2 Part-dIIAbdul RehmanNo ratings yet
- Understanding Output Voltage Limitations of DC/DC Buck ConvertersDocument4 pagesUnderstanding Output Voltage Limitations of DC/DC Buck ConvertersLatif KurniaNo ratings yet
- Electronics Laboratory DC Power Supply CircuitsDocument10 pagesElectronics Laboratory DC Power Supply CircuitsDen CelestraNo ratings yet
- Diode Characteristics and ApplicationsDocument12 pagesDiode Characteristics and ApplicationsZuopan YapNo ratings yet
- Basic Feedback Theory: Integrated CircuitsDocument5 pagesBasic Feedback Theory: Integrated CircuitsSourik BharNo ratings yet
- Study Material - Ripple Factor - Special DiodeDocument11 pagesStudy Material - Ripple Factor - Special Diodesenpaixd0110No ratings yet
- Aec AssignmentDocument14 pagesAec AssignmentAnnu YadavNo ratings yet
- Buck and Boost Converter Using PSPICEDocument9 pagesBuck and Boost Converter Using PSPICEmohanrajgupta19100% (1)
- Module - 1 Elec NotesDocument29 pagesModule - 1 Elec Notesswarupa.23iseNo ratings yet
- Power Converters LabDocument53 pagesPower Converters LabK Kiran VishnuNo ratings yet
- Chilewa Exp No. 06Document21 pagesChilewa Exp No. 06frank samndomiNo ratings yet
- Asmat Ullah (70069423) Experiment:5: Circuit DiagramDocument11 pagesAsmat Ullah (70069423) Experiment:5: Circuit DiagramAsmat NiaziNo ratings yet
- Sepic Converter Design and Operation: by Gregory SharpDocument21 pagesSepic Converter Design and Operation: by Gregory SharpSingam SridharNo ratings yet
- Enes BOZ 18014077 Guc Elektronigi Odev 2Document7 pagesEnes BOZ 18014077 Guc Elektronigi Odev 2Enes BozNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part II)Document108 pagesSwitch Mode Power Supply (SMPS) Topologies (Part II)Willie WalkerNo ratings yet
- Ec FinalDocument46 pagesEc FinalManjunath YadavNo ratings yet
- EE232 Exp4Document5 pagesEE232 Exp4Mei QiiNo ratings yet
- EDC Lab 4Document10 pagesEDC Lab 4Z S PlaysNo ratings yet
- Unit 3Document40 pagesUnit 3Venkat ChadalavadaNo ratings yet
- Erii5 555 Timer Astable OperationDocument16 pagesErii5 555 Timer Astable OperationAnonymous VASS3z0wTHNo ratings yet
- Half Wave Rectifier Circuits Part (1-A) : Experiment: DiodeDocument13 pagesHalf Wave Rectifier Circuits Part (1-A) : Experiment: DiodeCatalina ZelayaNo ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- Small-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMDocument8 pagesSmall-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMAslı ÇakırNo ratings yet
- Hack Into A Stopwatch To Make A Phototimer PDFDocument5 pagesHack Into A Stopwatch To Make A Phototimer PDFPravin MevadaNo ratings yet
- Electronics Devices & Circuit Lab ManualDocument53 pagesElectronics Devices & Circuit Lab Manualbiswajit7sarkar100% (1)
- DC Motor Direction Control Using Power TriacDocument7 pagesDC Motor Direction Control Using Power TriacAshok KumarNo ratings yet
- How To Configure A 555 Timer ICDocument9 pagesHow To Configure A 555 Timer ICHebert Danilo Auccapure CusiNo ratings yet
- Lab Manual 3 Semester Basic Electronics - I: Lab Engineerer: Subject TeacherDocument21 pagesLab Manual 3 Semester Basic Electronics - I: Lab Engineerer: Subject TeacherOmer Sheikh100% (1)
- RHPZ, A Two Way Control PathDocument11 pagesRHPZ, A Two Way Control PathkurabyqldNo ratings yet
- Diode Clippers and Clampers: ObjectiveDocument17 pagesDiode Clippers and Clampers: Objectiveashriii1154No ratings yet
- Electronic Components Circuits: (Diode Characteristies - Rectifier - Clipper)Document14 pagesElectronic Components Circuits: (Diode Characteristies - Rectifier - Clipper)em2200139No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- I O - Pads - in The ChipDocument5 pagesI O - Pads - in The ChipDeep SinghNo ratings yet
- F001450Document32 pagesF001450hifijunkieNo ratings yet
- Vlsi2 D and E Type MOSfetsDocument17 pagesVlsi2 D and E Type MOSfetsGaurav MehraNo ratings yet
- Beginning FPGA Programming - Partie75Document5 pagesBeginning FPGA Programming - Partie75ali alilouNo ratings yet
- 8051 MicrocontrollerDocument33 pages8051 Microcontrollerchanoch254No ratings yet
- APT50M75JLLDocument5 pagesAPT50M75JLLsoft4gsmNo ratings yet
- Yaesu Vertex VRX-1000 VHF Version Service ManualDocument48 pagesYaesu Vertex VRX-1000 VHF Version Service ManualIWNo ratings yet
- Germany Mobile ForensicsDocument14 pagesGermany Mobile Forensicspoststelle509No ratings yet
- Optoisolation and Optical Sensor Products: Selection GuideDocument64 pagesOptoisolation and Optical Sensor Products: Selection GuidetorinomgNo ratings yet
- Ce30300e PDFDocument345 pagesCe30300e PDFval_enteenNo ratings yet
- Module 1 EsatDocument10 pagesModule 1 EsatRicelle Ann ParaleNo ratings yet
- A Step-By-Step Guide To SMT Step SolderingDocument4 pagesA Step-By-Step Guide To SMT Step SolderingjackNo ratings yet
- Power Integration Lighting BrochureDocument48 pagesPower Integration Lighting Brochurejazavac1966No ratings yet
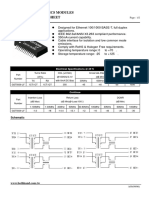
- 1000 Base - T Magnetics Modules P/N: Gst5009 LF Data Sheet: FeatureDocument2 pages1000 Base - T Magnetics Modules P/N: Gst5009 LF Data Sheet: FeatureĐiền Nguyễn ĐăngNo ratings yet
- Lecture - 12 6.4 Secondary Storage: Magnetic Disk and TapeDocument8 pagesLecture - 12 6.4 Secondary Storage: Magnetic Disk and TapedearsaswatNo ratings yet
- Evo 979 enDocument2 pagesEvo 979 enSergio Denis UCNo ratings yet
- Data Sheet: Oceanserver Digital Compass ProductsDocument2 pagesData Sheet: Oceanserver Digital Compass ProductsPriyanshu GuptaNo ratings yet
- Study On Slotted Waveguide Pyramidal Horn Antenna With Enhanced DirectivityDocument5 pagesStudy On Slotted Waveguide Pyramidal Horn Antenna With Enhanced DirectivityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Toshiba KRE1012030Document2 pagesToshiba KRE1012030ahmadNo ratings yet
- Chapter-2 Information Systems and It FundamentalsDocument14 pagesChapter-2 Information Systems and It FundamentalsAruna RajappaNo ratings yet
- Quanta Bu1 r1c SchematicsDocument32 pagesQuanta Bu1 r1c SchematicsyhomerNo ratings yet
- Awp Unit 3 PDFDocument17 pagesAwp Unit 3 PDFAKHILA PEESARANo ratings yet
- MSP 430 FR 5969Document143 pagesMSP 430 FR 5969Carlos Daniel RodriguezNo ratings yet
- P60X901 Service ManualDocument143 pagesP60X901 Service ManualChristopher A ArcherNo ratings yet
- Omron h3cr-g TimerDocument7 pagesOmron h3cr-g TimerRiky HidayatNo ratings yet
- L24C32Document14 pagesL24C32mpapamicNo ratings yet
- Jawaharlal Nehru Technological University Gurajada VizianagaramDocument5 pagesJawaharlal Nehru Technological University Gurajada VizianagarambmkmanicNo ratings yet