You might also like
- Captiva Ecm 2.4 LDocument35 pagesCaptiva Ecm 2.4 L8196850% (2)
- Aluminum Electrolytic CapacitorsDocument8 pagesAluminum Electrolytic CapacitorsEdson100% (1)
- TSD MTD WM MTD Production RF Receiving AbapDocument52 pagesTSD MTD WM MTD Production RF Receiving AbapsourishNo ratings yet
- Pimentel, 2008Document6 pagesPimentel, 2008EdsonNo ratings yet
- Ground Fault-1Document6 pagesGround Fault-1JoeJojoNo ratings yet
- Grid Connected PV System With Filtered Input Signal Normalised Least Mean P' Adaptive AlgorithmDocument6 pagesGrid Connected PV System With Filtered Input Signal Normalised Least Mean P' Adaptive AlgorithmHIGH DARBHANGANo ratings yet
- DC Link Voltage Control of Back-To-Back ConverterDocument6 pagesDC Link Voltage Control of Back-To-Back ConverterRoshan PradhanNo ratings yet
- Finite-Control-Set Model-Predictive Control For A Quasi-Z-Source Four-Leg Inverter Under Unbalanced Load ConditionDocument10 pagesFinite-Control-Set Model-Predictive Control For A Quasi-Z-Source Four-Leg Inverter Under Unbalanced Load ConditionckrimyouNo ratings yet
- Islanding: Prepared byDocument32 pagesIslanding: Prepared byMiGuelNo ratings yet
- Islanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageDocument4 pagesIslanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageRama KrishnaNo ratings yet
- MPPTDocument6 pagesMPPTSM FerdousNo ratings yet
- 1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationDocument9 pages1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationfangzpengNo ratings yet
- A Three-Phase Inverter For A Standalone Distributed Generation System-Adaptive Voltage Control Design and Stability Analysis - 201403Document11 pagesA Three-Phase Inverter For A Standalone Distributed Generation System-Adaptive Voltage Control Design and Stability Analysis - 201403Trần Minh ĐứcNo ratings yet
- Band Hysteresis CurrentDocument6 pagesBand Hysteresis CurrentGustav BelmontNo ratings yet
- DC Ground Fault AnalysisDocument1 pageDC Ground Fault Analysisalvin meNo ratings yet
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 pagesA D-Q Synchronous Frame Controller For Single Phase InvertershanNo ratings yet
- Two-Stage Micro-Grid Inverter With High PDFDocument10 pagesTwo-Stage Micro-Grid Inverter With High PDFacostaricciNo ratings yet
- An Efficient and High-Gain Inverter BaseDocument11 pagesAn Efficient and High-Gain Inverter BasertsridhareeeNo ratings yet
- 1SDC007113G0201 - QT14 2021 - enDocument72 pages1SDC007113G0201 - QT14 2021 - enyessica PadronNo ratings yet
- A Method of Power Decoupling For Long Life Micro-InverterDocument6 pagesA Method of Power Decoupling For Long Life Micro-InverterMaryam HassanNo ratings yet
- Single-Phase Seven-Level Grid-Connected Inverter For Photovoltaic SystemDocument7 pagesSingle-Phase Seven-Level Grid-Connected Inverter For Photovoltaic Systemanil kasotNo ratings yet
- Cir Ed 2003Document5 pagesCir Ed 2003Gunther HottNo ratings yet
- Active Voltage Control Using Distributed Generation On Distribution NetworksDocument6 pagesActive Voltage Control Using Distributed Generation On Distribution NetworksadarshcharipallyNo ratings yet
- 2016 - Microgrid Planning of Active and Reactive Power Loss Reduction in Distribution NetworkDocument5 pages2016 - Microgrid Planning of Active and Reactive Power Loss Reduction in Distribution NetworkxuanthamdhqnNo ratings yet
- A MPPT Algorithm For Single-Phase Single-Stage Photovoltaic ConvertersDocument6 pagesA MPPT Algorithm For Single-Phase Single-Stage Photovoltaic ConvertersJidhin JayanNo ratings yet
- Un Inversor de Fuente de Corriente Monofásico Con Filtro de Potencia Activa para Sistemas Fotovoltaicos Conectados A La RedDocument8 pagesUn Inversor de Fuente de Corriente Monofásico Con Filtro de Potencia Activa para Sistemas Fotovoltaicos Conectados A La RedeliasNo ratings yet
- Overcoming The Power Wall: Connecting Voltage Domains in SeriesDocument6 pagesOvercoming The Power Wall: Connecting Voltage Domains in SeriesDipanjan DasNo ratings yet
- Optimal Seasonal Voltage Control in Rural Distribution Networks With Distributed GeneratorsDocument11 pagesOptimal Seasonal Voltage Control in Rural Distribution Networks With Distributed GeneratorsDizky Christian HadiNo ratings yet
- 66kV NER PDFDocument5 pages66kV NER PDFDEADMANNo ratings yet
- Paper 1Document4 pagesPaper 1Maulik PandyaNo ratings yet
- Grid Voltage Sags Control Strategy For Photovoltaic Inverter Based On Adaptive Dynamic Reactive Power CompensationDocument5 pagesGrid Voltage Sags Control Strategy For Photovoltaic Inverter Based On Adaptive Dynamic Reactive Power CompensationElkin Polo ArizaNo ratings yet
- Analysis of Active Power Sharing and Synchronization in MultiDG Micro GridDocument6 pagesAnalysis of Active Power Sharing and Synchronization in MultiDG Micro GridAstrid BelloNo ratings yet
- Controller Design For Quasi-Z-Source Inverter in Photovoltaic SystemsDocument8 pagesController Design For Quasi-Z-Source Inverter in Photovoltaic SystemsMahendiran CrNo ratings yet
- Islanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooDocument8 pagesIslanding Issues of Grid-Connected PV Systems: S.Narendiran, Mayur Bansal, Sarat Kumar SahooRavi KankaleNo ratings yet
- Modeling and Control of Three Phases Grid Connected Photovoltaic SystemDocument6 pagesModeling and Control of Three Phases Grid Connected Photovoltaic SystemDi Mat3awed- دي متعاودNo ratings yet
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDocument8 pagesGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270No ratings yet
- Design and Simulation of Three Phase InvDocument4 pagesDesign and Simulation of Three Phase InvAbdul RahmanNo ratings yet
- Design and Simulation of Interleaved SEPIC Converter For Photo Voltaic ApplicationsDocument5 pagesDesign and Simulation of Interleaved SEPIC Converter For Photo Voltaic Applicationsardi taher1991No ratings yet
- Boukhriss Compeng Italy 2022Document5 pagesBoukhriss Compeng Italy 2022ALI BOUKHRISSNo ratings yet
- Level-Up/Level-Down Voltage Level Shifter For Nano-Scale ApplicationsDocument15 pagesLevel-Up/Level-Down Voltage Level Shifter For Nano-Scale ApplicationstrephenaNo ratings yet
- Four Novel PWM Shoot-Through Control Methods For Impedance Source DC-DC ConvertersDocument10 pagesFour Novel PWM Shoot-Through Control Methods For Impedance Source DC-DC ConvertersUtkarsh PrakashNo ratings yet
- Wide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation CapabilityDocument6 pagesWide Input Voltage Range High Step-Up DC-DC Converter With Fault-Tolerant Operation Capabilityjeos20132013No ratings yet
- XBDGNFGDocument5 pagesXBDGNFGehsan mirabadiNo ratings yet
- Paper PublicationDocument9 pagesPaper Publicationakhila100No ratings yet
- Grid Following DVI Based Converter Operating in Weak Grids For Enhancing Frequency StabilityDocument11 pagesGrid Following DVI Based Converter Operating in Weak Grids For Enhancing Frequency Stabilitymahdi.shahparastiNo ratings yet
- Control of A Supercapacitor Energy Storage SystemDocument8 pagesControl of A Supercapacitor Energy Storage SystemNtokozo HlatshwayoNo ratings yet
- A Cascaded Generalized Integral Control ForDocument10 pagesA Cascaded Generalized Integral Control ForsrinathNo ratings yet
- Analysis and Design of Cyclic Switched-Capacitor DC-DC ConvertersDocument11 pagesAnalysis and Design of Cyclic Switched-Capacitor DC-DC ConvertersAjmal FarooqNo ratings yet
- DC Pole To Pole Short Circuit Fault Analysis in VSC-HVDC Transmission SystemDocument6 pagesDC Pole To Pole Short Circuit Fault Analysis in VSC-HVDC Transmission SystemHarold De ChavezNo ratings yet
- Implementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationDocument8 pagesImplementation of Dual Control MPPT-based DC-DC Converter Fed Solar PV Power ApplicationArun raj DharamsuthNo ratings yet
- Paper9 Zellagui PDFDocument17 pagesPaper9 Zellagui PDFGunjan GaganNo ratings yet
- Fpga Controlled MPPT Based Boost Converter For Renewable Energy (Solar PV) Power ApplicationsDocument11 pagesFpga Controlled MPPT Based Boost Converter For Renewable Energy (Solar PV) Power ApplicationsIJAR JOURNALNo ratings yet
- Three-Phase Grid-Connected PV System: Antunes A. TorresDocument6 pagesThree-Phase Grid-Connected PV System: Antunes A. TorresSaulo XimenesNo ratings yet
- A PV Module-Integrated Inverter Using A Ćuk Converter in DCM With Island Detection SchemeDocument6 pagesA PV Module-Integrated Inverter Using A Ćuk Converter in DCM With Island Detection Schemegrasia77No ratings yet
- A Voltage and Frequency Droop Control Method For MicrosourcesDocument5 pagesA Voltage and Frequency Droop Control Method For MicrosourcesSuswagata SatpathyNo ratings yet
- BH Attach Aryy A 2019Document6 pagesBH Attach Aryy A 2019Adel BouledrouaNo ratings yet
- 2019 Analytical Design of LC Filter Inductance For TwoDocument6 pages2019 Analytical Design of LC Filter Inductance For Twodat.do12102003No ratings yet
- Application of Zig-Zag Transformers in A Three-Wire Three-Phase Dynamic Sag Corrector SystemDocument6 pagesApplication of Zig-Zag Transformers in A Three-Wire Three-Phase Dynamic Sag Corrector SystemDolisirNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- A Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage Variations Using Fuzzy Logic ControlDocument9 pagesA Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage Variations Using Fuzzy Logic ControlAbhinav ShendageNo ratings yet
- Modelling and Control of Dual Input Boost ConverteDocument10 pagesModelling and Control of Dual Input Boost ConverteDhinesh JeyandranNo ratings yet
- 1.1 Basic Laws of Magnetic TheoryDocument29 pages1.1 Basic Laws of Magnetic TheoryEdsonNo ratings yet
- Circuit To Increase Input Range-Sbaa244Document6 pagesCircuit To Increase Input Range-Sbaa244EdsonNo ratings yet
- High Voltage Differential Probe: Main CharacteristicsDocument6 pagesHigh Voltage Differential Probe: Main CharacteristicsEdsonNo ratings yet
- Programming The GigatronDocument5 pagesProgramming The GigatronEdsonNo ratings yet
- Nneme, 2014Document5 pagesNneme, 2014EdsonNo ratings yet
- Cosmic Ray Failures in Power Electronics: Application NoteDocument12 pagesCosmic Ray Failures in Power Electronics: Application NoteEdsonNo ratings yet
- Antialiasing Filter Circuit Design-Sbaa282Document10 pagesAntialiasing Filter Circuit Design-Sbaa282EdsonNo ratings yet
- Brief Summary of TGD, 2019Document3 pagesBrief Summary of TGD, 2019EdsonNo ratings yet
- Application Note: Connection Between Gate Driver and ControllerDocument4 pagesApplication Note: Connection Between Gate Driver and ControllerEdsonNo ratings yet
- A Four Leg Shunt Active Power Filter Predictive Fuzzy Logic Controller For Low-Voltage Unbalanced-Load Distribution NetworksDocument15 pagesA Four Leg Shunt Active Power Filter Predictive Fuzzy Logic Controller For Low-Voltage Unbalanced-Load Distribution NetworksEdsonNo ratings yet
- Multilevel Converters-A New Breed of Power Converters: Jih-Sheng and Fang Zheng PengDocument9 pagesMultilevel Converters-A New Breed of Power Converters: Jih-Sheng and Fang Zheng PengEdsonNo ratings yet
- Brief Summary of TGD, 2019Document3 pagesBrief Summary of TGD, 2019EdsonNo ratings yet
- A Single-Phase Hybrid Active Power FilterDocument6 pagesA Single-Phase Hybrid Active Power FilterEdsonNo ratings yet
- Grid Connected System Using Energy Processing Stages: PV TWODocument4 pagesGrid Connected System Using Energy Processing Stages: PV TWOEdsonNo ratings yet
- Massoud, 2004Document6 pagesMassoud, 2004EdsonNo ratings yet
- Power Device Evolution and The Advent of Igbt 2005Document33 pagesPower Device Evolution and The Advent of Igbt 2005EdsonNo ratings yet
- 5g Design Best Practices White PaperDocument13 pages5g Design Best Practices White PaperOrlando MedinaNo ratings yet
- Haulmax HaulTruck 11.21.13 FINALDocument2 pagesHaulmax HaulTruck 11.21.13 FINALjogremaurNo ratings yet
- Université Des MascareignesDocument1 pageUniversité Des Mascareigneskev sevNo ratings yet
- Poster Vourch Et Al IEEE Sensors 2013dDocument1 pagePoster Vourch Et Al IEEE Sensors 2013dMarcelo BaptistaNo ratings yet
- BSC CBCS Computer-ScienceDocument21 pagesBSC CBCS Computer-Scienceaniruddha shimpaleNo ratings yet
- Wheel Type Incremental Rotary Encoders: ENC SeriesDocument2 pagesWheel Type Incremental Rotary Encoders: ENC SeriesRoberto RizaldyNo ratings yet
- BuiltIn Proactive Services List - 05 - 12 - 2020Document20 pagesBuiltIn Proactive Services List - 05 - 12 - 2020oorhan41No ratings yet
- Crack Initiation in Nodular Cast IronDocument1 pageCrack Initiation in Nodular Cast IronmohamadabdallaNo ratings yet
- U-BOOTS (1) Technical SeminarDocument18 pagesU-BOOTS (1) Technical SeminarBasavaraj M PatilNo ratings yet
- ABX00063 SchematicsDocument8 pagesABX00063 SchematicsIoan TudosaNo ratings yet
- Product CodeDocument20 pagesProduct CodeHEnajeNo ratings yet
- Asic Prototyping AldecDocument10 pagesAsic Prototyping AldecKhaled Abou ElseoudNo ratings yet
- New Concept Lead Generation Strategic ArchitectDocument5 pagesNew Concept Lead Generation Strategic ArchitectIt MobileNo ratings yet
- Complete Manual SCADA SystemsDocument376 pagesComplete Manual SCADA SystemsmohdkamalhaziqNo ratings yet
- Computerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912Document190 pagesComputerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912jermNo ratings yet
- Motor Car (Construction, Equipment and Use) Regulations 1952Document18 pagesMotor Car (Construction, Equipment and Use) Regulations 1952Tarek MohamedNo ratings yet
- Catalog No. 9T51B0013: Representative ImageDocument3 pagesCatalog No. 9T51B0013: Representative ImageJulio VargasNo ratings yet
- Advanced Lidar Data Processing With LastoolsDocument6 pagesAdvanced Lidar Data Processing With Lastoolsaa_purwantaraNo ratings yet
- UPS 348-01-01 PowerWAVE 3000T PDFDocument4 pagesUPS 348-01-01 PowerWAVE 3000T PDFShahin ShajahanNo ratings yet
- ODLI20161209 004 UPD en MY Inside Innovation Backgrounder HueDocument4 pagesODLI20161209 004 UPD en MY Inside Innovation Backgrounder HueRizki Fadly MatondangNo ratings yet
- Cambridge IGCSE: Computer Science 0478/21Document16 pagesCambridge IGCSE: Computer Science 0478/21Ahmed ZeeshanNo ratings yet
- Pa2X Loading OS and Resources PDFDocument16 pagesPa2X Loading OS and Resources PDFAnonymous teB7D6jNo ratings yet
- HIAB14000XGDocument267 pagesHIAB14000XGMigueNo ratings yet
- Restructuring of The Swedish National Grid Control Centres: Session 2004Document7 pagesRestructuring of The Swedish National Grid Control Centres: Session 2004ramsesiNo ratings yet
- Prediction of Overshoot and Crosstalk of Low Voltage GaN HEMTDocument27 pagesPrediction of Overshoot and Crosstalk of Low Voltage GaN HEMTfirststudentNo ratings yet
- An Efficient Power Flow Algorithm For Distribution Systems With Polynomial LoadDocument16 pagesAn Efficient Power Flow Algorithm For Distribution Systems With Polynomial Loadishak789No ratings yet
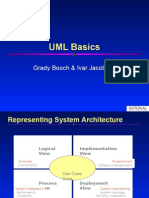
- UML Basics: Grady Booch & Ivar JacobsonDocument101 pagesUML Basics: Grady Booch & Ivar Jacobsongunasekaran.subramani3879100% (1)
- 7 Tools MosaLingua Ebook - 3rd Edition - ENDocument20 pages7 Tools MosaLingua Ebook - 3rd Edition - ENBella AndryczkaNo ratings yet