You might also like
- Tuned Mass DamperDocument13 pagesTuned Mass DamperFaisalNo ratings yet
- Tuned Mass Damper Report PDFDocument21 pagesTuned Mass Damper Report PDFRitu t Raj100% (1)
- Topic 1 - Tuned Mass DamperDocument45 pagesTopic 1 - Tuned Mass DamperdhanarajNo ratings yet
- SEO-Optimized Title for TMD DocumentDocument32 pagesSEO-Optimized Title for TMD DocumentmgilbelNo ratings yet
- Performance of tuned mass dampers under wind loadsDocument13 pagesPerformance of tuned mass dampers under wind loadsDhirendra Kumar PandeyNo ratings yet
- 1 s2.0 S0266892014000216 MainDocument9 pages1 s2.0 S0266892014000216 MainHisham TariqNo ratings yet
- Active Structural Elements Within A General Vibration Control ContextDocument1 pageActive Structural Elements Within A General Vibration Control Contextthanggimme.phanNo ratings yet
- Yang Et Al 2021 Vibration Suppression of Structures Using Tuned Mass Damper Technology a State of the Art ReviewDocument25 pagesYang Et Al 2021 Vibration Suppression of Structures Using Tuned Mass Damper Technology a State of the Art Reviewgomathy arunNo ratings yet
- Optimum Parameters of Tuned Mass Damper For Damped Main SystemDocument23 pagesOptimum Parameters of Tuned Mass Damper For Damped Main SystemmirceaNo ratings yet
- Estimate Modal Properties of Tuned Mass Damper Using TransmissibilityDocument12 pagesEstimate Modal Properties of Tuned Mass Damper Using TransmissibilityFabianaDaRosaSufiattiNo ratings yet
- 10.1007@s42417 020 00216 3Document31 pages10.1007@s42417 020 00216 3Soham MukhopadhyayNo ratings yet
- Non-smooth Composite Control Approach Improves PMSM Disturbance RejectionDocument8 pagesNon-smooth Composite Control Approach Improves PMSM Disturbance RejectionJose Luis Mata LedesmaNo ratings yet
- Robust Design of Mass-Uncertain Rolling-Pendulum TMDs ForDocument21 pagesRobust Design of Mass-Uncertain Rolling-Pendulum TMDs ForDiego FloresNo ratings yet
- Engineering Structures: Saman Bagheri, Vahid Rahmani-DabbaghDocument11 pagesEngineering Structures: Saman Bagheri, Vahid Rahmani-DabbaghSumit SabaleNo ratings yet
- Semi-Active Fuzzy Control of A Wind-Excited Tall Building Using Multi-Objectivegenetic AlgorithmDocument16 pagesSemi-Active Fuzzy Control of A Wind-Excited Tall Building Using Multi-Objectivegenetic Algorithmalexkoch2No ratings yet
- Smart MaterialsDocument61 pagesSmart MaterialsMadhusudhanan ChelliahNo ratings yet
- Active Multi Degree-of-Freedom Pendulum Tuned Mass Damper: M. Eltaeb, R. KashaniDocument8 pagesActive Multi Degree-of-Freedom Pendulum Tuned Mass Damper: M. Eltaeb, R. KashaniAnkush Pendhari JainNo ratings yet
- Optimization of Tuned Mass Damper in Multistoried Buildings: Dinakara Akarsh P., Ronghe G.NDocument6 pagesOptimization of Tuned Mass Damper in Multistoried Buildings: Dinakara Akarsh P., Ronghe G.NDina AvdićNo ratings yet
- Technical Comparison of Harmonic Mitigation PDFDocument9 pagesTechnical Comparison of Harmonic Mitigation PDFGurmeet SinghNo ratings yet
- Effects of Drive Train Model Parameters On A Variable Speed Wind Turbine (#168388) - 148491Document7 pagesEffects of Drive Train Model Parameters On A Variable Speed Wind Turbine (#168388) - 148491akhil babu nalliNo ratings yet
- Ger 3183Document14 pagesGer 3183rizwanNo ratings yet
- Control of Response of Structures With Passive and Active Tuned Mass DampersDocument14 pagesControl of Response of Structures With Passive and Active Tuned Mass DampersKoustav MajumdarNo ratings yet
- Abstract For MahdiDocument2 pagesAbstract For MahdiSalah DjerouniNo ratings yet
- Engineering Structures: SciencedirectDocument12 pagesEngineering Structures: SciencedirectsuzanavilaNo ratings yet
- Vibration Analysis of Structure Using Tune Mass DamperDocument7 pagesVibration Analysis of Structure Using Tune Mass DamperAnonymous kw8Yrp0R5rNo ratings yet
- Research Article: Vibration Control of Buildings Using Magnetorheological Damper: A New Control AlgorithmDocument11 pagesResearch Article: Vibration Control of Buildings Using Magnetorheological Damper: A New Control AlgorithmHemanth C KNo ratings yet
- Robust Broadband Vibration Control of A Flexible Structure Using An Electrical Dynamic AbsorberDocument10 pagesRobust Broadband Vibration Control of A Flexible Structure Using An Electrical Dynamic Absorbersmkim123No ratings yet
- George 2018Document6 pagesGeorge 2018Josh RNo ratings yet
- Seismic Performance of Tmds in Improving The Response of MRF BuildingsDocument14 pagesSeismic Performance of Tmds in Improving The Response of MRF BuildingsErick HurtadoNo ratings yet
- Transient Stability of Small GeneratorDocument8 pagesTransient Stability of Small GeneratorAnonymous BBX2E87aHNo ratings yet
- Linear Electromagnetic Electric Generator For HarvDocument9 pagesLinear Electromagnetic Electric Generator For Harvmohamed zakariaNo ratings yet
- A Closed Loop Quasi Optical Dynamic Brak PDFDocument8 pagesA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNo ratings yet
- Self-Assembly of Milli-Scale Robotic ManipulatorsDocument6 pagesSelf-Assembly of Milli-Scale Robotic ManipulatorsDreadful ParagonNo ratings yet
- Articulos VibracionesDocument10 pagesArticulos VibracionesJosé Manuel SoriaNo ratings yet
- Mechatronics: Linxiang Wang, Roderick V.N. MelnikDocument12 pagesMechatronics: Linxiang Wang, Roderick V.N. MelnikEhab WilsonNo ratings yet
- Nanoelectromechanical SystemsDocument10 pagesNanoelectromechanical SystemsSebastianNo ratings yet
- Basics of Vibration IsolationDocument8 pagesBasics of Vibration IsolationSAiTejaNo ratings yet
- Loss of Excitation Protection for Synchronous GeneratorsDocument14 pagesLoss of Excitation Protection for Synchronous GeneratorsPraveen PeethambaranNo ratings yet
- 4 PBDocument8 pages4 PBs.mencouNo ratings yet
- Automatically Contrilled Load SheddingDocument6 pagesAutomatically Contrilled Load SheddingShivam YadavNo ratings yet
- Design Drives to Meet EMC RegulationsDocument26 pagesDesign Drives to Meet EMC RegulationsWhite TigerNo ratings yet
- Energy HarvestorDocument9 pagesEnergy HarvestorashishNo ratings yet
- A Generalized 2-DOF Model For Optimal Design of MDOF Structures Controlled by Tuned Mass Damper Inerter (TMDI)Document36 pagesA Generalized 2-DOF Model For Optimal Design of MDOF Structures Controlled by Tuned Mass Damper Inerter (TMDI)sumaijiaNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document20 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- vc34 Kompend Kap03 eDocument24 pagesvc34 Kompend Kap03 eSafetyjoe2No ratings yet
- Adaptive Electromagnetic Vibration Absorber For A Multimode StructureDocument9 pagesAdaptive Electromagnetic Vibration Absorber For A Multimode StructureCarlos Gianpaul Rincón RuizNo ratings yet
- Common-Mode Electromagnetic Interference Mitigation For Solid-State TransformersDocument15 pagesCommon-Mode Electromagnetic Interference Mitigation For Solid-State TransformersE-dot ProjectNo ratings yet
- 541 140215040659 Phpapp02 PDFDocument3 pages541 140215040659 Phpapp02 PDFAman MalikNo ratings yet
- Stability Considerations For Industrial Power SystemDocument9 pagesStability Considerations For Industrial Power SystemMaurício Campos PassaroNo ratings yet
- Dynamic Error Budgeting - Practice for Floor Vibration IsolationDocument7 pagesDynamic Error Budgeting - Practice for Floor Vibration Isolationuamiranda3518No ratings yet
- A Study of Piezoelectric Harvesters For Low-Level Vibrations in Wireless Sensor NetworksDocument6 pagesA Study of Piezoelectric Harvesters For Low-Level Vibrations in Wireless Sensor NetworksJuseverck JuniorNo ratings yet
- Thermal Simulation and Optimization of A Common-Mode Filter For A SiC InverterDocument6 pagesThermal Simulation and Optimization of A Common-Mode Filter For A SiC InverterMaurizio TrancheroNo ratings yet
- Taylor Series Predicts Power System Transient StabilityDocument7 pagesTaylor Series Predicts Power System Transient StabilityOladeji Ifedayo RNo ratings yet
- 10 1109@tim 2009 2022377 PDFDocument7 pages10 1109@tim 2009 2022377 PDFfahrur rizaNo ratings yet
- DML Theory and PracticeDocument7 pagesDML Theory and PracticeGoh Chin YuanNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- Denmark UniversityDocument6 pagesDenmark Universityle hoai NamNo ratings yet
- Two-mass model vibration suppression control method for servo systemsDocument6 pagesTwo-mass model vibration suppression control method for servo systemsLIU LINo ratings yet
- Damping Torsional Oscillations Using TCBRDocument7 pagesDamping Torsional Oscillations Using TCBRKanhaiya lal MaliNo ratings yet
- Back View 01: Aic ManagementDocument1 pageBack View 01: Aic ManagementHung NguyentheNo ratings yet
- CANOPY - DETAILS-ModelDocument1 pageCANOPY - DETAILS-ModelHung NguyentheNo ratings yet
- Aic Management: Left View 01Document1 pageAic Management: Left View 01Hung NguyentheNo ratings yet
- CANOPY - DETAILS-Model PDFDocument1 pageCANOPY - DETAILS-Model PDFHung NguyentheNo ratings yet
- CANOPY - DETAILS-Model PDFDocument1 pageCANOPY - DETAILS-Model PDFHung NguyentheNo ratings yet
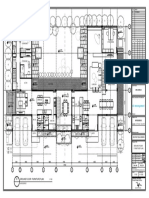
- Aic Management: 1St Floor Finishes Plan 01Document1 pageAic Management: 1St Floor Finishes Plan 01Hung NguyentheNo ratings yet
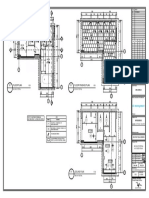
- Floor Plan 01 Section 1-1 03: Detail 01Document1 pageFloor Plan 01 Section 1-1 03: Detail 01Hung NguyentheNo ratings yet
- A 2020 PDFDocument1 pageA 2020 PDFHung NguyentheNo ratings yet
- Detail 04 01: Aic ManagementDocument1 pageDetail 04 01: Aic ManagementHung NguyentheNo ratings yet
- Aic Management: Perspective 3 01Document1 pageAic Management: Perspective 3 01Hung NguyentheNo ratings yet
- AADocument1 pageAAHung NguyentheNo ratings yet
- Aic Management: 1St Floor Finishes Plan 01Document1 pageAic Management: 1St Floor Finishes Plan 01Hung NguyentheNo ratings yet
- Floor Plan 01 Section 1-1 03: Detail 01Document1 pageFloor Plan 01 Section 1-1 03: Detail 01Hung NguyentheNo ratings yet
- A 2020 PDFDocument1 pageA 2020 PDFHung NguyentheNo ratings yet
- Aic Management: MR & MRS.MDocument1 pageAic Management: MR & MRS.MHung NguyentheNo ratings yet
- Wind Load Calculations for PV ArraysDocument2 pagesWind Load Calculations for PV Arraysvarao1975No ratings yet
- Aic Management: 1St Floor Finishes Plan 01Document1 pageAic Management: 1St Floor Finishes Plan 01Hung NguyentheNo ratings yet
- Aic Management: MR & MRS.MDocument1 pageAic Management: MR & MRS.MHung NguyentheNo ratings yet
- Aic Management: Right View 01Document1 pageAic Management: Right View 01Hung NguyentheNo ratings yet
- Detail 04 01: Aic ManagementDocument1 pageDetail 04 01: Aic ManagementHung NguyentheNo ratings yet
- Aic Management: Left View 01Document1 pageAic Management: Left View 01Hung NguyentheNo ratings yet
- Aic Management: Ground Floor Furniture Plan 01Document1 pageAic Management: Ground Floor Furniture Plan 01Hung NguyentheNo ratings yet
- Aic Management: 2Nd Ceiling Floor 01Document1 pageAic Management: 2Nd Ceiling Floor 01Hung NguyentheNo ratings yet
- Aic Management: Ground Floor Finishes Plan 01Document1 pageAic Management: Ground Floor Finishes Plan 01Hung NguyentheNo ratings yet
- Section 4-4 02: Aic ManagementDocument1 pageSection 4-4 02: Aic ManagementHung NguyentheNo ratings yet
- Aic Management: 1St Floor Finishes Plan 01Document1 pageAic Management: 1St Floor Finishes Plan 01Hung NguyentheNo ratings yet
- A 1300Document1 pageA 1300Hung NguyentheNo ratings yet
- Floor Plan 01 Section 1-1 03: Detail 01Document1 pageFloor Plan 01 Section 1-1 03: Detail 01Hung NguyentheNo ratings yet
- Aic Management: Left View 01Document1 pageAic Management: Left View 01Hung NguyentheNo ratings yet
- Floor Finishes Plan 01 Floor Plan 01: Aic ManagementDocument1 pageFloor Finishes Plan 01 Floor Plan 01: Aic ManagementHung NguyentheNo ratings yet
- Diagnosing and Managing Acute and Chronic SinusitisDocument14 pagesDiagnosing and Managing Acute and Chronic SinusitisAnonymous y3TIOwX8100% (1)
- Folktalesofkeral 00 MenoDocument124 pagesFolktalesofkeral 00 Menoreena sudhirNo ratings yet
- TQM 2 MARKSDocument12 pagesTQM 2 MARKSMARIYAPPANNo ratings yet
- LC1D150M7: Product Data SheetDocument3 pagesLC1D150M7: Product Data SheetTrong Hung NguyenNo ratings yet
- READING U8Document4 pagesREADING U8Như TrầnNo ratings yet
- Cognitive Load Theory (John Sweller) : Information ProcessingDocument2 pagesCognitive Load Theory (John Sweller) : Information ProcessingNik ZazlealizaNo ratings yet
- Mri BrainDocument74 pagesMri Brainagithia100% (1)
- Home BMW F11 530D Xdrive Touring Wiring Diagrams and Functional DescriptionDocument1 pageHome BMW F11 530D Xdrive Touring Wiring Diagrams and Functional DescriptionOliver AlfaroNo ratings yet
- Burkert General Catalogue Rev2Document44 pagesBurkert General Catalogue Rev2cuongNo ratings yet
- WholeDocument397 pagesWholedelbot01No ratings yet
- Course Outline TP WindowsDocument6 pagesCourse Outline TP WindowsAnonymous PcPkRpAKD5No ratings yet
- Breaugh Starke PDFDocument30 pagesBreaugh Starke PDFRichard YeongNo ratings yet
- MIT LL. Target Radar Cross Section (RCS)Document45 pagesMIT LL. Target Radar Cross Section (RCS)darin koblickNo ratings yet
- KPW FSO Yetagun Presentation 250713Document36 pagesKPW FSO Yetagun Presentation 250713muhamadrafie1975No ratings yet
- Sajid Bhuiya CVDocument3 pagesSajid Bhuiya CVapi-612088476No ratings yet
- Lifeboat Equipment ListDocument1 pageLifeboat Equipment Listjosua albertNo ratings yet
- Vernacular Terms in Philippine ConstructionDocument3 pagesVernacular Terms in Philippine ConstructionFelix Albit Ogabang IiiNo ratings yet
- Chen2019 PDFDocument5 pagesChen2019 PDFPriya VeerNo ratings yet
- CAPS LESSON PLAN, KAHOOT QUIZ, PPT VIDEODocument3 pagesCAPS LESSON PLAN, KAHOOT QUIZ, PPT VIDEOMandisa MselekuNo ratings yet
- Gen Z WhitepaperDocument13 pagesGen Z Whitepaperjurgute2000No ratings yet
- Gauss Jordan MethodDocument6 pagesGauss Jordan MethodnNo ratings yet
- tmp82D3 TMPDocument12 pagestmp82D3 TMPFrontiersNo ratings yet
- Forcepoint Email Security Configuration Information v8.5Document64 pagesForcepoint Email Security Configuration Information v8.5ajay chaudharyNo ratings yet
- Effects of UrbanizationDocument17 pagesEffects of UrbanizationAriel EstigoyNo ratings yet
- Educ 580 - Edpuzzle PD HandoutDocument3 pagesEduc 580 - Edpuzzle PD Handoutapi-548868233No ratings yet
- Project Management OfficeDocument42 pagesProject Management OfficeqazqazNo ratings yet
- Video Conferencing Lesson PlanDocument6 pagesVideo Conferencing Lesson PlanANN JILLIAN JOYCE MONDONEDO100% (1)
- Lyrics: Original Songs: - JW BroadcastingDocument56 pagesLyrics: Original Songs: - JW BroadcastingLucky MorenoNo ratings yet
- Photon BrochureDocument1 pagePhoton Brochureshwetha281889242No ratings yet
- Weap - ModflowDocument20 pagesWeap - Modflowguive3No ratings yet