You might also like
- The General Problem of Elastic Wave Propagation in Multilayered Anisotropic MediaDocument11 pagesThe General Problem of Elastic Wave Propagation in Multilayered Anisotropic MediaPyrsos CandlesNo ratings yet
- ch3Document78 pagesch3David GaoNo ratings yet
- Daratard 40 PDFDocument2 pagesDaratard 40 PDFFaeez ZainNo ratings yet
- Solid Waste ManagementDocument134 pagesSolid Waste ManagementBalajee Mech100% (3)
- Quencher TOWER DesignDocument8 pagesQuencher TOWER DesignHendrik Panthron Pangarso Mursid100% (1)
- ITP & Ceklis Bored PileDocument5 pagesITP & Ceklis Bored Pilefari_civil06No ratings yet
- Buckling of Thin PlatesDocument14 pagesBuckling of Thin PlatesOSCARDELTANo ratings yet
- Mechanics of Solid Problems On Stress and StrainDocument4 pagesMechanics of Solid Problems On Stress and StrainYogeswaran100% (1)
- Lecture 2D Engineering ConstantsDocument20 pagesLecture 2D Engineering ConstantsHarish ShridharamurthyNo ratings yet
- Module-Wise Questions (Prev Exams)Document10 pagesModule-Wise Questions (Prev Exams)Kiran ChristopherNo ratings yet
- Question Paper CodeDocument3 pagesQuestion Paper Codeeugin cebertNo ratings yet
- MSE 2203: Mechanical Behavior of Materials: Chapter One Theory of Elasticity and PlasticityDocument25 pagesMSE 2203: Mechanical Behavior of Materials: Chapter One Theory of Elasticity and PlasticityRosni hasanNo ratings yet
- Assigned Problems - Week of February 13Document5 pagesAssigned Problems - Week of February 13Anam PirachaNo ratings yet
- Tia Eia 222-G.0 6-19-00Document68 pagesTia Eia 222-G.0 6-19-00BuczenkoNo ratings yet
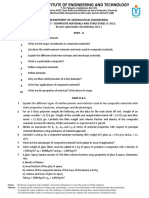
- At Least TWO Questions From Each Part.: (06 Marks)Document2 pagesAt Least TWO Questions From Each Part.: (06 Marks)nvnrevNo ratings yet
- Introduction To Materials Science & EngineeringDocument30 pagesIntroduction To Materials Science & Engineering2zvhqpfxy2No ratings yet
- Crystal Imperfections Point DefectsDocument38 pagesCrystal Imperfections Point DefectsPuloma DwibediNo ratings yet
- Chapter8 Buckling PDFDocument8 pagesChapter8 Buckling PDFdroessaert_stijnNo ratings yet
- Theory of Elasticity and Plasticity-RizwanDocument34 pagesTheory of Elasticity and Plasticity-RizwanMISBAH UL HAQUENo ratings yet
- 5 Week 23 Stress Strain Relashinship SU 2021Document52 pages5 Week 23 Stress Strain Relashinship SU 2021علىالمهندسNo ratings yet
- DCS - Design of Beams - Lect2Document15 pagesDCS - Design of Beams - Lect2Saket ThakkarNo ratings yet
- Lecture Note On Theory of Elasticity and PlasticityDocument81 pagesLecture Note On Theory of Elasticity and PlasticityEkene Chikwendu-OgbodoNo ratings yet
- Materials Science - Examination QuestionsDocument2 pagesMaterials Science - Examination QuestionsNoura Nour ElshamsNo ratings yet
- Immediate Deflection in Concrete BeamsDocument11 pagesImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukNo ratings yet
- Mechanical Properties of MetalsDocument258 pagesMechanical Properties of MetalsIsza Marie N. SocorinNo ratings yet
- Stress Analysis Exam 3015w2018-19Document12 pagesStress Analysis Exam 3015w2018-19kenzybocatotNo ratings yet
- Settlement of A Circular Silo Foundation: Task SpecificationDocument16 pagesSettlement of A Circular Silo Foundation: Task Specificationdeo warouwNo ratings yet
- Analysis of Stress & StrainDocument21 pagesAnalysis of Stress & StrainMustafa Zahid100% (1)
- Full TextStress-strain Model For Concrete Under Cyclic LoadingDocument14 pagesFull TextStress-strain Model For Concrete Under Cyclic LoadingtoilfulboyNo ratings yet
- Engineering Materials I (Chapter 1)Document37 pagesEngineering Materials I (Chapter 1)Mekonnen Ayal100% (1)
- 2a.ALTERNATING CURRENT (69-94)Document27 pages2a.ALTERNATING CURRENT (69-94)KeertanaNo ratings yet
- Lecture 8Document48 pagesLecture 8riganNo ratings yet
- 1 Electromagnetic InductionDocument20 pages1 Electromagnetic InductionHarmanjeet SinghNo ratings yet
- PlasticityDocument48 pagesPlasticityMUHAMMADYASAA KHANNo ratings yet
- Earthquake Damage and Seismic Code For BuildingsDocument10 pagesEarthquake Damage and Seismic Code For BuildingshemalcmistryNo ratings yet
- Deformation & StrengthDocument35 pagesDeformation & StrengthcolorofstoneNo ratings yet
- TDS - Construction Dewatering V4Document4 pagesTDS - Construction Dewatering V4Anonymous QSTAL5JpNo ratings yet
- Fundamentals of Elasticity Theory: Professor M. H. SaddDocument29 pagesFundamentals of Elasticity Theory: Professor M. H. SaddMilad RadNo ratings yet
- Chapter 1 Stress and Strain ScribdDocument23 pagesChapter 1 Stress and Strain ScribdKBSMANITNo ratings yet
- L12 - Plastic Analysis PDFDocument9 pagesL12 - Plastic Analysis PDFSunil Kumar P GNo ratings yet
- Theory of Elasticity & Plasticity PDFDocument17 pagesTheory of Elasticity & Plasticity PDFMohammed Abid50% (4)
- III-Basics of Continuum Mechanics-StressDocument22 pagesIII-Basics of Continuum Mechanics-StressMirza Muneeb AhsanNo ratings yet
- Lecture 7 - Serviceability Criteria of The ACI Code For Deflection - Crack WidthDocument68 pagesLecture 7 - Serviceability Criteria of The ACI Code For Deflection - Crack WidthMuhammad SulemanNo ratings yet
- Immediate Deflection CalculationDocument2 pagesImmediate Deflection CalculationPatrick TaclibonNo ratings yet
- Review Questions CMS PDFDocument2 pagesReview Questions CMS PDFAbdul NazèêrNo ratings yet
- 150 5320 6eDocument124 pages150 5320 6eJim Jakson MboeNo ratings yet
- Chapter One, Introduction PDFDocument9 pagesChapter One, Introduction PDFOmar Abu MahfouthNo ratings yet
- Lefm NotesDocument8 pagesLefm NotesSolomon GracioNo ratings yet
- Stress AnalysisDocument18 pagesStress Analysisrasif88718100% (1)
- Seismic Performance Evaluation of Concrete Gravity DamsDocument14 pagesSeismic Performance Evaluation of Concrete Gravity DamshamidNo ratings yet
- Strength of MaterialDocument117 pagesStrength of MaterialManuKumar100% (1)
- Composite - Design ProjectDocument6 pagesComposite - Design ProjectSomen DasNo ratings yet
- Aluminum HonneycombDocument16 pagesAluminum HonneycombMangesh ThokalNo ratings yet
- Case Study CreepDocument9 pagesCase Study CreepKevinSatriaNo ratings yet
- Classification of NanomaterialsDocument7 pagesClassification of NanomaterialsjabasNo ratings yet
- Mohr'S Stress Circle Notes: Centre of Advanced Design Engineering ENG4082 Mathematics and MechanicsDocument17 pagesMohr'S Stress Circle Notes: Centre of Advanced Design Engineering ENG4082 Mathematics and Mechanicspilas_nikolaNo ratings yet
- Material Science: Prof. Satish V. KailasDocument19 pagesMaterial Science: Prof. Satish V. KailasraghavlambiNo ratings yet
- Fatigue Strength PDFDocument11 pagesFatigue Strength PDFVinayak Rao100% (1)
- Plates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisFrom EverandPlates and Shells for Smart Structures: Classical and Advanced Theories for Modeling and AnalysisRating: 5 out of 5 stars5/5 (1)
- Chapter 10Document12 pagesChapter 10anirbanpwd76No ratings yet
- 2001, W. E. Haisler Chapter 12: Torsion of Circular BarsDocument28 pages2001, W. E. Haisler Chapter 12: Torsion of Circular BarsgemihdaniNo ratings yet
- 05-State of Stress in 3D 8.4.16 (8 Files Merged) PDFDocument347 pages05-State of Stress in 3D 8.4.16 (8 Files Merged) PDFChandra Bhushan Choubey100% (1)
- Vibrations of Thick Cylindrical StructuresDocument14 pagesVibrations of Thick Cylindrical StructuresAnonymous PT8OGe0Z100% (1)
- SyllabusDocument1 pageSyllabusBalajee MechNo ratings yet
- ED7004Document1 pageED7004Balajee MechNo ratings yet
- AdvertisementDocument1 pageAdvertisementBalajee MechNo ratings yet
- Devlopment of SurfacesDocument17 pagesDevlopment of SurfacesBalajee Mech100% (5)
- Selection of Centrifugal PumpinpmentDocument10 pagesSelection of Centrifugal PumpinpmentBalajee MechNo ratings yet
- New Microsoft Word DocumentDocument17 pagesNew Microsoft Word DocumentBalajee MechNo ratings yet
- 0K5099Document6 pages0K5099Peela NaveenNo ratings yet
- Ind 03Document1 pageInd 03Benjamín Price BallónNo ratings yet
- Waterproofing TunnelsDocument12 pagesWaterproofing TunnelsSharifah Normala100% (1)
- Mercer Valve 9100 Relief Valve Threaded AEDocument16 pagesMercer Valve 9100 Relief Valve Threaded AEdoens JKTNo ratings yet
- Operation and Product ManagementDocument2 pagesOperation and Product ManagementIbrahim JawedNo ratings yet
- Rowad - Installation Procedure For HDPEDocument19 pagesRowad - Installation Procedure For HDPEAnantha Padmanabhan100% (1)
- ICC ESR-3814 For HIT-RE 500 V3Document47 pagesICC ESR-3814 For HIT-RE 500 V3yessica godoyNo ratings yet
- Caracterizacion Metalurgica de Los BracketsDocument8 pagesCaracterizacion Metalurgica de Los BracketsJorge Humberto Gil CardonaNo ratings yet
- Development of A Ginger Reinforced Polyvinyl Alcohol BiocompositeDocument68 pagesDevelopment of A Ginger Reinforced Polyvinyl Alcohol BiocompositeBaba JuniorNo ratings yet
- Design Application HairpinDocument23 pagesDesign Application Hairpinkinjalpatel12345No ratings yet
- Qa/Qc Department Welding Inspection ReportDocument3 pagesQa/Qc Department Welding Inspection Reportabdulgafoor54No ratings yet
- 1129011951BMCS4Document24 pages1129011951BMCS4DHEESHNA DILEEP 200545No ratings yet
- Brochure AqualockDocument2 pagesBrochure AqualockKSRNo ratings yet
- The Conditions For Water Reticulation PlansDocument1 pageThe Conditions For Water Reticulation PlansedwinhlcNo ratings yet
- NPTEL Concrete Engg and Tech Problem and Solved AnswersDocument5 pagesNPTEL Concrete Engg and Tech Problem and Solved AnswerssuranjanacNo ratings yet
- BD Project ProposalDocument21 pagesBD Project ProposalMohammed Jowardhar50% (2)
- CH 06 Binary PhaseDocument62 pagesCH 06 Binary PhaseUltrichNo ratings yet
- Relief Discoloration/ Staining Pitting: Uddeholm Defect Chart Uddeholm Defect Chart Uddeholm Defect ChartDocument2 pagesRelief Discoloration/ Staining Pitting: Uddeholm Defect Chart Uddeholm Defect Chart Uddeholm Defect Chartodhiles1No ratings yet
- H3CTDocument8 pagesH3CTSujanto WidjajaNo ratings yet
- SMT - Kashibai Navale College of Engineering, Vadgaon Pune: Heat TransferDocument8 pagesSMT - Kashibai Navale College of Engineering, Vadgaon Pune: Heat TransferFS18ME046 MAYUR NikamNo ratings yet
- (IQC) LG (67) - G3-1214 - Grille Assembly Discharge - Detailed Inspection ProcedureDocument15 pages(IQC) LG (67) - G3-1214 - Grille Assembly Discharge - Detailed Inspection ProcedureAnonymous Lta32Ta9No ratings yet
- 000 N EE 0020003 Rev1 Acoustic Insulation SpecificationDocument18 pages000 N EE 0020003 Rev1 Acoustic Insulation Specificationonur gunesNo ratings yet
- Controller Isoil Ml110Document7 pagesController Isoil Ml110infinitymeNo ratings yet
- Seminar Pooja CDocument23 pagesSeminar Pooja Cpooja chavanNo ratings yet
- Bisco All-Bond 3 Instructions For UseDocument8 pagesBisco All-Bond 3 Instructions For Usemoji_puiNo ratings yet
- D 427 Diezel EngineDocument76 pagesD 427 Diezel EnginezhenyaNo ratings yet
- Grade 4 Module 4 FinalDocument12 pagesGrade 4 Module 4 FinalCeleste Dailisan VillaranNo ratings yet
- Customised Engineered Packages: Reciprocating Air CompressorsDocument4 pagesCustomised Engineered Packages: Reciprocating Air Compressorsmogwai71No ratings yet