You might also like
- Liczby I Działania OŚ LICZBOWADocument10 pagesLiczby I Działania OŚ LICZBOWAAgnieszka KozłowskaNo ratings yet
- Przekladnia PasowaDocument21 pagesPrzekladnia PasowakamelsuxNo ratings yet
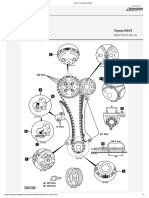
- Instrukcja Wymiany Rozrzadu HDI PDFDocument26 pagesInstrukcja Wymiany Rozrzadu HDI PDFJan KoniecznyNo ratings yet
- Pompa Tłoczkowa Osiowa A10VSO-31 PDFDocument48 pagesPompa Tłoczkowa Osiowa A10VSO-31 PDFprojektant2100% (1)
- SkrzyniaDocument56 pagesSkrzyniaGraty GratyNo ratings yet
- Silownie Okretowe CZ - IIDocument68 pagesSilownie Okretowe CZ - IIWojciech Milewski100% (1)
- F1-P2-Si - Ownie Okr - ToweDocument9 pagesF1-P2-Si - Ownie Okr - TowePNo ratings yet
- 6.2. Wielokąty I Ich Własności - Kartkówka (Poziom Trudniejszy) Test (Z Widoczną Punktacją)Document4 pages6.2. Wielokąty I Ich Własności - Kartkówka (Poziom Trudniejszy) Test (Z Widoczną Punktacją)FANCLUB ROXIENo ratings yet
- Kontrola I Ustawianie Napędu RozrząduDocument70 pagesKontrola I Ustawianie Napędu RozrząduqwertNo ratings yet
- Kolenasto VratiloDocument7 pagesKolenasto VratiloAna AndrejicNo ratings yet
- ABB TNOSCT Ecodesign 2015Document2 pagesABB TNOSCT Ecodesign 2015Michal GodlewskiNo ratings yet
- Odpowiedzi 1Document10 pagesOdpowiedzi 1Jon Arnold GreyNo ratings yet
- 1 - 10 Przekładnie ZębateDocument35 pages1 - 10 Przekładnie ZębaterasesqNo ratings yet
- 3001 Instrukcja Bloku Zaworowego Blain EV100Document13 pages3001 Instrukcja Bloku Zaworowego Blain EV100LIFT-POLNo ratings yet
- Silnik 6cylDocument75 pagesSilnik 6cylАмурдеталь БлаговещенскNo ratings yet
- Regulacja Gaźnika 2100Document7 pagesRegulacja Gaźnika 2100TomaszNo ratings yet
- Reglator Obr Silnika Szczotkowego Prądu Zmiennego PDFDocument7 pagesReglator Obr Silnika Szczotkowego Prądu Zmiennego PDFgregNo ratings yet
- VTB - XL With Gearbox - PolishDocument13 pagesVTB - XL With Gearbox - PolishMiguelOliveira1No ratings yet
- Okrętowe Układy NapędoweDocument67 pagesOkrętowe Układy Napędowetomo1973100% (1)
- Micom P543 - P544 - P545 - P546 - SCHNEIDERDocument12 pagesMicom P543 - P544 - P545 - P546 - SCHNEIDERreinscNo ratings yet
- Balicki Krytyczne PIL 199 2009Document6 pagesBalicki Krytyczne PIL 199 2009Fugfhhf GhgghhgfNo ratings yet
- Silnik MXDocument61 pagesSilnik MXp_janko100% (2)
- Szlifierka NilesaDocument10 pagesSzlifierka NilesasensacjeNo ratings yet
- Elektryczne Napędy Zwrotnicowe NoweDocument4 pagesElektryczne Napędy Zwrotnicowe NoweJoão PavanNo ratings yet
- HTTPWWW - Inop - Poznan - Plwydawnictwoobrobka Plastyczna Metalixvii 2 2 NowyDocument10 pagesHTTPWWW - Inop - Poznan - Plwydawnictwoobrobka Plastyczna Metalixvii 2 2 NowyFugfhhf GhgghhgfNo ratings yet
- Przekladnie Ślimakowe STMDocument48 pagesPrzekladnie Ślimakowe STMdaniel.mentelNo ratings yet
- Przekładnie ZębateDocument27 pagesPrzekładnie ZębaterasesqNo ratings yet
- Przetrząsacz Karuzelowy Z-260, Instrukcja, KatalogDocument18 pagesPrzetrząsacz Karuzelowy Z-260, Instrukcja, KatalogRobert PiotrowskiNo ratings yet
- 3 - Tranzystor Jako WzmacniaczDocument3 pages3 - Tranzystor Jako WzmacniaczMichał MołczanNo ratings yet
- Przekladnie Pasowe 6Document48 pagesPrzekladnie Pasowe 6pledzwon123No ratings yet
- Giersch gg55 - gg80Document16 pagesGiersch gg55 - gg80dogbertNo ratings yet
- 400bqo PLDocument6 pages400bqo PLmephir666No ratings yet
- Instrukcja Laboratoryjna - RozrzadDocument11 pagesInstrukcja Laboratoryjna - RozrzadQQQQQNo ratings yet
- Opracowanie DudzińskiDocument11 pagesOpracowanie Dudzińskirobson2015No ratings yet
- Wademekum Maszynisty - SM30Document17 pagesWademekum Maszynisty - SM30Rom BNo ratings yet
- Katalog Wirbet 2015Document23 pagesKatalog Wirbet 2015burvanovNo ratings yet
- Kryllowicz PDFDocument4 pagesKryllowicz PDFAnnaNo ratings yet
- 955 - 975 - Manual HydrovaneDocument12 pages955 - 975 - Manual Hydrovanemantenimiento pierrotNo ratings yet
- Stery Strumieniowe P. NowakDocument9 pagesStery Strumieniowe P. NowakSylvek91No ratings yet
- Dokumen - Tips Berthoud Instrukcja Opryskiwacze Samojezdne Boxer R Czesc 2Document28 pagesDokumen - Tips Berthoud Instrukcja Opryskiwacze Samojezdne Boxer R Czesc 2masey22No ratings yet
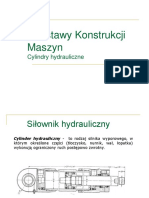
- Wyklad1 2016 Cylin Przeklppt 5Document68 pagesWyklad1 2016 Cylin Przeklppt 5ALEXSANDRONo ratings yet
- Rozwiązanie Problemu NiedostateczneDocument16 pagesRozwiązanie Problemu NiedostateczneSckubpNo ratings yet
- System Bieżącej Diagnostyki Stanu Elementów PrzenośnikaDocument14 pagesSystem Bieżącej Diagnostyki Stanu Elementów PrzenośnikamagicplmalNo ratings yet
- Rozdzial 07Document12 pagesRozdzial 07synjolkiNo ratings yet
- 79 22Document5 pages79 22absbiuroNo ratings yet
- Grua HRMDocument8 pagesGrua HRMHugoRamosMamaniNo ratings yet
- Gibidi Io MEKA-SL-SC230Document14 pagesGibidi Io MEKA-SL-SC230piotreNo ratings yet
- F1-P4-Manewrowanie StatkiemDocument8 pagesF1-P4-Manewrowanie StatkiemŁukasz MarekNo ratings yet
- ZHR-300/S: Dokumentacja Techniczno - RuchowaDocument6 pagesZHR-300/S: Dokumentacja Techniczno - Ruchowaalexandrw28No ratings yet
- KroonaDocument5 pagesKroonawolumNo ratings yet
- DC 13Document17 pagesDC 13tempalt.42069No ratings yet
- Pompy Wtryskowe I Wtryskiwacze PDFDocument8 pagesPompy Wtryskowe I Wtryskiwacze PDFJan0% (1)
- Doświadczenia Firmy Becker Warkop ZDocument9 pagesDoświadczenia Firmy Becker Warkop Zmarszalek.emmNo ratings yet
- HaldexDocument16 pagesHaldexWaldemar JęczewskiNo ratings yet
- WK 450 610 Zawór Przelewowy Sterowany Bezpośrednio Typ DBD: DM /min Wn6, 10, 20 Do 63 Mpa Do 250Document16 pagesWK 450 610 Zawór Przelewowy Sterowany Bezpośrednio Typ DBD: DM /min Wn6, 10, 20 Do 63 Mpa Do 250Gonza LasherasNo ratings yet
- Pasek Zębaty - AutodataDocument5 pagesPasek Zębaty - AutodatamotoolukaszNo ratings yet
- Badanie Prądnicy Prądu Stałego: Laboratorium ElektryczneDocument9 pagesBadanie Prądnicy Prądu Stałego: Laboratorium ElektryczneAbc AbcNo ratings yet
- Kalibracja Dyna-4Document7 pagesKalibracja Dyna-4Piotr MichałowskiNo ratings yet
- Łańcuch Rozrządu - AutodataDocument2 pagesŁańcuch Rozrządu - Autodatapawel9724No ratings yet
- ConstDocument4 pagesConstPatryk ŁysikNo ratings yet
- Duer SilnikiDocument4 pagesDuer SilnikiCoco PolcarNo ratings yet
- Pola-Wielkoątów - ZadaniaDocument4 pagesPola-Wielkoątów - Zadaniakamila siudaNo ratings yet
- Badania Porównawcze SocjologiaDocument23 pagesBadania Porównawcze SocjologiawojtylaNo ratings yet
- Ignaszak, Ciesiółka Zakopane2009Document14 pagesIgnaszak, Ciesiółka Zakopane2009Natalia SutaNo ratings yet
- Wpływ Wydajności Pracy Oraz Postępu Technicznego Na Poziom Rozwoju GospodarczegoDocument9 pagesWpływ Wydajności Pracy Oraz Postępu Technicznego Na Poziom Rozwoju GospodarczegoXxKuba Paradowski xX OfficialNo ratings yet
- Instrukcja Do Stacji Pomp SR961Document52 pagesInstrukcja Do Stacji Pomp SR961cybortechNo ratings yet
- Zakres Rozszerzony Karta PracyDocument4 pagesZakres Rozszerzony Karta PracyPiotr KrzyżewskiNo ratings yet
- Enkodery Naprawa PDFDocument4 pagesEnkodery Naprawa PDFKrzysztof BondkaNo ratings yet
- Granica FunkcjiDocument7 pagesGranica FunkcjiPiotr BińczykNo ratings yet