You might also like
- Echo Sounder BasicsDocument2 pagesEcho Sounder BasicsMark RhiannonNo ratings yet
- Acoustic Modem IntroductionDocument13 pagesAcoustic Modem Introductionlsaty123No ratings yet
- SonarDocument11 pagesSonarIzhar Shaikh67% (3)
- 634320547467133544Document18 pages634320547467133544Uday Kumar ReddyNo ratings yet
- SonarDocument17 pagesSonarjoshigauta50% (2)
- Define Marine Echo-Sounding Equipment and PrinciplesDocument3 pagesDefine Marine Echo-Sounding Equipment and PrinciplesDarkxeiDNo ratings yet
- SONARDocument6 pagesSONARĐoàn ThịnhNo ratings yet
- SonarDocument3 pagesSonarJAIVISHNU MNo ratings yet
- Echolocation: How ships see using soundDocument2 pagesEcholocation: How ships see using soundRoscarl GorospeNo ratings yet
- Seminar on the History and Development of Echo SoundingDocument13 pagesSeminar on the History and Development of Echo SoundingSanal RajNo ratings yet
- FishFinder PDFDocument4 pagesFishFinder PDFdanieligpNo ratings yet
- Principles of Underwater SensorsDocument10 pagesPrinciples of Underwater SensorsSheena Mae LantacaNo ratings yet
- DSP Project Sonar PresentationDocument27 pagesDSP Project Sonar PresentationThajid Ibna Rouf Uday100% (1)
- Principles of Side Scan Sonar ImagingDocument22 pagesPrinciples of Side Scan Sonar ImagingDiters CreationNo ratings yet
- SONARDocument13 pagesSONARSubir Maity100% (4)
- What Is An Echo SounderDocument1 pageWhat Is An Echo SounderKarl NagacNo ratings yet
- Sonar Systems and Their Many UsesDocument4 pagesSonar Systems and Their Many UsesshirtquittersNo ratings yet
- Tugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DDocument8 pagesTugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DMuhammad Wahid SiddikNo ratings yet
- Lab SonarDocument4 pagesLab Sonar71241957No ratings yet
- SonarDocument14 pagesSonarhusnrhnNo ratings yet
- اECHO SOUNDERDocument15 pagesاECHO SOUNDERArwa HusseinNo ratings yet
- Sonar: - Swapnil Hole (17) - Akshay Bramhane (18) - Amey Dandge (19) - Kshitij S. Dasture (20) Prof.P.A.PATHADEDocument30 pagesSonar: - Swapnil Hole (17) - Akshay Bramhane (18) - Amey Dandge (19) - Kshitij S. Dasture (20) Prof.P.A.PATHADEChinmay ApasangiNo ratings yet
- NAVEDTRA 14340 Aviation Electricity and Electronics - Undersea WarfareDocument54 pagesNAVEDTRA 14340 Aviation Electricity and Electronics - Undersea Warfarehackbrian003No ratings yet
- US Navy Course NAVEDTRA 14340 - Aviation Electricity & Electronics-Undersea Warfare (Usw)Document55 pagesUS Navy Course NAVEDTRA 14340 - Aviation Electricity & Electronics-Undersea Warfare (Usw)GeorgesNo ratings yet
- Probing The SeafloorDocument10 pagesProbing The SeafloorPappu DiaNo ratings yet
- Echo SounderDocument4 pagesEcho SounderShivam JhaNo ratings yet
- SonarDocument33 pagesSonarFelipe CardosoNo ratings yet
- Day 7 - 9 Echo Sounder and Speed MeasurementDocument32 pagesDay 7 - 9 Echo Sounder and Speed MeasurementSto Cu100% (7)
- How sonar works using sound wave echoesDocument2 pagesHow sonar works using sound wave echoesLet's musicoNo ratings yet
- Sonar Side Scan Sonar: Photo Courtesy of Klein Associates, WWW - KleinDocument5 pagesSonar Side Scan Sonar: Photo Courtesy of Klein Associates, WWW - KleinIgnatius Dimas CarmelittoNo ratings yet
- Echo SounderDocument5 pagesEcho SounderFaizan100% (1)
- Modern Physics Term Paper on SONARDocument24 pagesModern Physics Term Paper on SONARprateek154No ratings yet
- SONAR Presentation: History, Types, and ApplicationsDocument45 pagesSONAR Presentation: History, Types, and ApplicationsTejassarwajna DegalaNo ratings yet
- Basic Principles of Marine EchoDocument5 pagesBasic Principles of Marine EchoMark Vinson Matira Garcia100% (2)
- Sonar Technology: Measurement and InstrumentationDocument8 pagesSonar Technology: Measurement and InstrumentationMuhammad Haseeb JavedNo ratings yet
- SONAR - NavigationDocument25 pagesSONAR - NavigationKarlaColinaNo ratings yet
- Sonar Technology: DefinitionDocument7 pagesSonar Technology: DefinitionMuhammad Haseeb JavedNo ratings yet
- Sonar: Presented By: Mike Puato & Neil CorpuzDocument33 pagesSonar: Presented By: Mike Puato & Neil CorpuzMax100% (1)
- Contoh Journal ReviewDocument6 pagesContoh Journal ReviewMuchammad Misbachul MunirNo ratings yet
- ReportDocument10 pagesReportM-joshua DecenaNo ratings yet
- Measure water depth with echo sounderDocument3 pagesMeasure water depth with echo sounderCLIJOHN PABLO FORDNo ratings yet
- Echo SounderDocument21 pagesEcho SounderVaruna Shantha75% (4)
- Sonar Application: DSP ProjectDocument27 pagesSonar Application: DSP ProjectMuhammed IfkazNo ratings yet
- SONARDocument4 pagesSONARakNo ratings yet
- Doppler Effect ExplainedDocument34 pagesDoppler Effect ExplainedsgrrscNo ratings yet
- Bathymetry Survey MethodsDocument7 pagesBathymetry Survey MethodsIra febrinaNo ratings yet
- Exploration: of The Ocean BasinsDocument3 pagesExploration: of The Ocean BasinsSergs jonelNo ratings yet
- Gitika's Science ProjectDocument4 pagesGitika's Science ProjectSamara ShindeNo ratings yet
- Measure Ship Speed with Doppler LogDocument7 pagesMeasure Ship Speed with Doppler LogFERRO HIDAYAHNo ratings yet
- How acoustic communication systems allow divers and submarines to communicate underwaterDocument4 pagesHow acoustic communication systems allow divers and submarines to communicate underwater283472 ktr.phd.ece.19No ratings yet
- Echo Sounder Components and TechniquesDocument14 pagesEcho Sounder Components and TechniquesArwa HusseinNo ratings yet
- FURUNO Transducer Handbook HR09 WebDocument20 pagesFURUNO Transducer Handbook HR09 WebJan JbaNo ratings yet
- Technology Lesson RevDocument5 pagesTechnology Lesson RevdidikhartadiNo ratings yet
- Navigational Aids - SonarDocument34 pagesNavigational Aids - SonarHans Christian MacasaNo ratings yet
- Nav 1 ADocument12 pagesNav 1 AKen bryle CanonigoNo ratings yet
- Remote SensingDocument26 pagesRemote SensingPIBRACNo ratings yet
- How sound waves are used in everyday lifeDocument10 pagesHow sound waves are used in everyday lifeSj Miasco-MejongNo ratings yet
- How Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksFrom EverandHow Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksNo ratings yet
- Ocean life: expeditions and essays exploring the abyss: Ocean Life, #1From EverandOcean life: expeditions and essays exploring the abyss: Ocean Life, #1No ratings yet
- Critical Values For Lawshe's Content Validity RatioDocument9 pagesCritical Values For Lawshe's Content Validity RatioNida AjrinaNo ratings yet
- Fiber Optic: Hung Nguyen Phuong ThanDocument18 pagesFiber Optic: Hung Nguyen Phuong ThanNida AjrinaNo ratings yet
- Fiber Optic Light SourcesDocument15 pagesFiber Optic Light SourcesSrujana cNo ratings yet
- Introduction To Fiber OpticsDocument17 pagesIntroduction To Fiber OpticsNida AjrinaNo ratings yet
- Stick More. The Reason? The Structure of Animal Hair Is Similar To The Structure of Human Hair. There AreDocument1 pageStick More. The Reason? The Structure of Animal Hair Is Similar To The Structure of Human Hair. There AreNida AjrinaNo ratings yet
- How T-Sonic Technology Deeply Cleanses Skin for a Radiant ComplexionDocument1 pageHow T-Sonic Technology Deeply Cleanses Skin for a Radiant ComplexionNida AjrinaNo ratings yet
- 7476 - JK FFDocument4 pages7476 - JK FFjbcen8293No ratings yet
- 7432 DatasheetDocument6 pages7432 DatasheetSergio GuerraNo ratings yet
- Hoja Caracteristicas 7474 PDFDocument6 pagesHoja Caracteristicas 7474 PDFArun UpadhyayaNo ratings yet
- 1st Quarter Exam Grade 10Document4 pages1st Quarter Exam Grade 10Des AbrasiaNo ratings yet
- Reservoir EngineeringDocument914 pagesReservoir EngineeringYerbolSultanbayevNo ratings yet
- Physical VarificationDocument6 pagesPhysical VarificationSudheer NairNo ratings yet
- Makogon Gas Hydrates - 2010Document11 pagesMakogon Gas Hydrates - 2010Alfino Harun LubisNo ratings yet
- Ozamiz 32-8-21Document101 pagesOzamiz 32-8-21lklklklk8908100% (2)
- Lecture 4.1 - Prospecting and Exploration PDFDocument91 pagesLecture 4.1 - Prospecting and Exploration PDFvanjovi lofrancoNo ratings yet
- Shaft Collar in Deep Overburden - Aur Resources - LouvicourtDocument8 pagesShaft Collar in Deep Overburden - Aur Resources - LouvicourtEEPNo ratings yet
- Mscbot 602Document302 pagesMscbot 602Gurwinder Singh 10 jasmineNo ratings yet
- FHWA Soils and Foundations Excerpt PDFDocument110 pagesFHWA Soils and Foundations Excerpt PDFVincent GacadNo ratings yet
- Maptek Australia2012 Sean Dixon Using ROM in HARP ModellingDocument23 pagesMaptek Australia2012 Sean Dixon Using ROM in HARP ModellingKenny Casilla100% (2)
- CE6405 Soil MechanicsDocument13 pagesCE6405 Soil MechanicsshanmugamNo ratings yet
- BathymetryDocument3 pagesBathymetrySekhar Reddy100% (1)
- Earthquake Thesis StatementDocument7 pagesEarthquake Thesis Statementaflnzraiaaetew100% (2)
- Basement Rocks of The PhilippinesDocument2 pagesBasement Rocks of The PhilippinesCj VirayNo ratings yet
- 20Document16 pages20restofficalNo ratings yet
- Rock and Rock Cycle AssessmentDocument6 pagesRock and Rock Cycle AssessmentIng ridNo ratings yet
- ChapterDocument37 pagesChapterSamuel Mawutor GamorNo ratings yet
- ZondRes2D ÑNG PDFDocument167 pagesZondRes2D ÑNG PDFAndresyago GonzalezNo ratings yet
- Subsurface Explorations and Types of Foundations: ExploreDocument6 pagesSubsurface Explorations and Types of Foundations: ExploreErica AgathaNo ratings yet
- Earth Science TopicsDocument1 pageEarth Science TopicsDyoley Pearl ZantuaNo ratings yet
- GEOL 101 Lab 8Document10 pagesGEOL 101 Lab 8Jack ChenNo ratings yet
- Session Oral PresentationDocument2 pagesSession Oral PresentationdiditkusumaNo ratings yet
- TOR 5 MW Solar Project PDFDocument106 pagesTOR 5 MW Solar Project PDFSufi Shah Hamid Jalali100% (1)
- Rock CycleDocument3 pagesRock Cycleapi-231516879No ratings yet
- Geo-Spatial Tools For Environment PlanningDocument13 pagesGeo-Spatial Tools For Environment PlanningAr Abhinav SrivastavNo ratings yet
- Water Management BHP BillitonDocument17 pagesWater Management BHP BillitonMaychel WibowoNo ratings yet
- Pre Darwinian TheoriesDocument5 pagesPre Darwinian Theoriesmonster143No ratings yet
- Chapter 4Document63 pagesChapter 4Pankaj KushwahaNo ratings yet
- বাংলাদেশ ভূমি পরিমাপের আদর্শ এককসমূহDocument31 pagesবাংলাদেশ ভূমি পরিমাপের আদর্শ এককসমূহmosammat sumaNo ratings yet
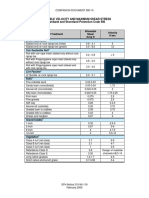
- Allowable Velocity and Maximum Shear Stress Streambank and Shoreland Protection Code 580Document2 pagesAllowable Velocity and Maximum Shear Stress Streambank and Shoreland Protection Code 580toantutoantuNo ratings yet