You might also like
- Ch07 AVR Programming in CDocument54 pagesCh07 AVR Programming in Csajid rajaNo ratings yet
- SAMPLE MCQuestions ByTopicsDocument45 pagesSAMPLE MCQuestions ByTopicsVeeru ManikantaNo ratings yet
- Embedded C Basic Lab Manual 21EC481 by RAGHUNATHDocument33 pagesEmbedded C Basic Lab Manual 21EC481 by RAGHUNATHRaghunath B H100% (6)
- 8086 Microprocessor Interfacing MCQ SDocument4 pages8086 Microprocessor Interfacing MCQ SDeepak Ahlawat67% (3)
- Arm7 - Lpc2148 Embedded Processor Based ProjectsDocument2 pagesArm7 - Lpc2148 Embedded Processor Based ProjectsManish Narkhede75% (4)
- ARM Notes For StudentsDocument24 pagesARM Notes For StudentsAkshit Sharma100% (1)
- Unit-4 Arm ArchitectureDocument71 pagesUnit-4 Arm ArchitectureChandu81870gmail.com KayithiNo ratings yet
- Microcontroller Lab ManualDocument127 pagesMicrocontroller Lab Manualsiri.pogula100% (2)
- Neuromorphic ComputingDocument27 pagesNeuromorphic ComputingTitan Bgmi100% (6)
- The 8051 Microcontroler Based Embedded SystemsDocument43 pagesThe 8051 Microcontroler Based Embedded Systemsmanishpatel_790% (1)
- Unit-5 PIC18 Architecture PDFDocument26 pagesUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Power Supplies & RegulatorsDocument15 pagesPower Supplies & RegulatorsNarasimha Murthy YayavaramNo ratings yet
- 2 MarksDocument30 pages2 MarksAnitha Kumari SivathanuNo ratings yet
- PIC QuestionsDocument4 pagesPIC Questionsgopikrishnarao100% (1)
- EC6504 Microprocessor and Microcontroller Lecture Notes All 5 UnitsDocument633 pagesEC6504 Microprocessor and Microcontroller Lecture Notes All 5 Unitsgokulchandru82% (22)
- 8051 Microcontroller (2 Marks - Question Bank)Document13 pages8051 Microcontroller (2 Marks - Question Bank)Dr. N.Shanmugasundaram97% (34)
- Microcontroller Viva Questions and AnswersDocument5 pagesMicrocontroller Viva Questions and Answerspankaj yadav100% (2)
- Microcontroller 8051Document94 pagesMicrocontroller 8051subbu205160% (5)
- 8096 Microcontrollers NotesDocument9 pages8096 Microcontrollers NotesNarasimha Murthy YayavaramNo ratings yet
- 8051 ArchitectureDocument46 pages8051 ArchitectureSiddhasen PatilNo ratings yet
- Microcontroller Lab Viva Questions & AnswersDocument29 pagesMicrocontroller Lab Viva Questions & AnswersAmbika Narayan73% (15)
- ARM - PPT 8Document74 pagesARM - PPT 8roysalways4u100% (1)
- Mes Question-BankDocument4 pagesMes Question-BankGanaraj KaruvajeNo ratings yet
- Question Bank Advanced ProcessorsDocument2 pagesQuestion Bank Advanced ProcessorsManish Narkhede67% (3)
- Thumb InstructionsDocument37 pagesThumb InstructionsSuhas ShirolNo ratings yet
- 8051 Unit 1 NotesDocument19 pages8051 Unit 1 NotesSOMESH B S100% (13)
- Chapter 2introduction To The C2xx DSP Core and Code GenerationDocument4 pagesChapter 2introduction To The C2xx DSP Core and Code Generationdivya624No ratings yet
- Multiple Choice QuestionsDocument4 pagesMultiple Choice QuestionsJojo Cansino50% (6)
- AVR Microcontroller Question BankDocument2 pagesAVR Microcontroller Question BankmadhurithkNo ratings yet
- 18EC46 Question BankDocument1 page18EC46 Question Bankdinesh M.A.No ratings yet
- Ec8691 MPMC All 5 UnitsDocument660 pagesEc8691 MPMC All 5 Unitsspgmaniarunagiri100% (4)
- The 8051 Mcq'sDocument7 pagesThe 8051 Mcq'sAnsh Vashist75% (4)
- Question Bank 16ee415 - PLC & AutomationDocument12 pagesQuestion Bank 16ee415 - PLC & Automationfunnyguy100% (2)
- ARM Instruction SetDocument29 pagesARM Instruction SetNeeshank MahajanNo ratings yet
- Linear Integrated Circuits 70 Interview Questions and Solutions 2 - DivyumDocument14 pagesLinear Integrated Circuits 70 Interview Questions and Solutions 2 - Divyumbalu56kvNo ratings yet
- 8051 Instruction SetDocument79 pages8051 Instruction Setgsathishbsa100% (1)
- DSP Important Viva QuestionsDocument3 pagesDSP Important Viva QuestionsDeepak Sahu100% (2)
- Arm 7 ArchitectureDocument22 pagesArm 7 ArchitectureNarasimha Murthy YayavaramNo ratings yet
- 8096Document23 pages8096Sreekanth PagadapalliNo ratings yet
- Arm MCQDocument12 pagesArm MCQAshok Kumar60% (5)
- University Question Bank - EdcDocument16 pagesUniversity Question Bank - EdcSenthil IlangovanNo ratings yet
- UNIT-V Realization of State MachinesDocument29 pagesUNIT-V Realization of State MachinesNarasimha Murthy Yayavaram100% (20)
- Interfacing LED With 8086 PDFDocument9 pagesInterfacing LED With 8086 PDFqnu0750% (6)
- Jain College of Engineering, Belagavi: Signals & Systems (18ec45) Question Bank For Cie - IiiDocument3 pagesJain College of Engineering, Belagavi: Signals & Systems (18ec45) Question Bank For Cie - Iiisystech techniques50% (2)
- 8051 Microcontroller NotesDocument40 pages8051 Microcontroller Notesilg1100% (1)
- Computational Building Blocks of DSPDocument28 pagesComputational Building Blocks of DSPVasantha Chandrasekaran80% (5)
- JNTU 4-1 Microcontroller & Applications Old Question PapersDocument4 pagesJNTU 4-1 Microcontroller & Applications Old Question Papersmukesh_sonu100% (1)
- Introduction To 8051 ProgrammingDocument24 pagesIntroduction To 8051 Programmingveeramaniks408No ratings yet
- Microprocessor & Microcontroller Objective Type QuestionsDocument2 pagesMicroprocessor & Microcontroller Objective Type Questionsgokulchandru100% (2)
- EE - Power Electronics Short NotesDocument34 pagesEE - Power Electronics Short NotesRavinder RangaNo ratings yet
- Reset Circuit of 8051 ControllerDocument3 pagesReset Circuit of 8051 ControllerSuwilanji Joshua Chilongo100% (1)
- PIC Microcontrollers: Chapter 7: Addressing Modes, Bank Switching, Table ProcessingDocument42 pagesPIC Microcontrollers: Chapter 7: Addressing Modes, Bank Switching, Table ProcessingBernard Maacaron100% (1)
- UNIT - I CPLD & FPGA ArchitecturesDocument22 pagesUNIT - I CPLD & FPGA Architecturesyayavaram100% (2)
- ADVANCED ANALOG IC DESIGN Lab ManualDocument27 pagesADVANCED ANALOG IC DESIGN Lab ManualJahnavi Ratnam0% (1)
- Features of The LPC214X FamilyDocument13 pagesFeatures of The LPC214X FamilyramyaNo ratings yet
- Introduction To Electronics and Communication (BESCK104C/BESCK204C) - Embedded Systems (Module 4)Document79 pagesIntroduction To Electronics and Communication (BESCK104C/BESCK204C) - Embedded Systems (Module 4)Shrishail Bhat100% (1)
- Pic Micro ControllersDocument18 pagesPic Micro ControllersKrishna BoreddyNo ratings yet
- Unit 1&2Document97 pagesUnit 1&2manoj3e9329No ratings yet
- Unit 1Document44 pagesUnit 1TakeItEasyDude TIEDNo ratings yet
- Unit 3 AdvancedMCDocument108 pagesUnit 3 AdvancedMCSubramaniam GnanasekaranNo ratings yet
- PIC MicrocontrollerDocument26 pagesPIC MicrocontrollerK.R.Raguram100% (1)
- Pic - TPT IeteDocument69 pagesPic - TPT IeteyayavaramNo ratings yet
- Unit Iii: CPLD & Fpga Architecture & ApplicationsDocument30 pagesUnit Iii: CPLD & Fpga Architecture & ApplicationsNarasimha Murthy Yayavaram100% (7)
- Deffects Textures LCDocument480 pagesDeffects Textures LCNarasimha Murthy YayavaramNo ratings yet
- UNIT II-Digital DesignDocument14 pagesUNIT II-Digital DesignNarasimha Murthy YayavaramNo ratings yet
- UNIT III-Digital System DesignDocument13 pagesUNIT III-Digital System DesignNarasimha Murthy YayavaramNo ratings yet
- UNIT-I Digital System DesignDocument28 pagesUNIT-I Digital System DesignNarasimha Murthy YayavaramNo ratings yet
- Mixed Signal Embedded ProgrammingDocument268 pagesMixed Signal Embedded ProgrammingPavan Kumar100% (14)
- Introduction To VLSI TechnologyDocument32 pagesIntroduction To VLSI TechnologyNarasimha Murthy YayavaramNo ratings yet
- UNIT-V Realization of State MachinesDocument29 pagesUNIT-V Realization of State MachinesNarasimha Murthy Yayavaram100% (20)
- Unit Ii: CPLD & Fpga Architecture & ApplicationsDocument20 pagesUnit Ii: CPLD & Fpga Architecture & ApplicationsNarasimha Murthy Yayavaram100% (1)
- Semi Custom Integrated Circuit DesignDocument18 pagesSemi Custom Integrated Circuit DesignNarasimha Murthy YayavaramNo ratings yet
- Data Communications - NotesDocument26 pagesData Communications - NotesNarasimha Murthy YayavaramNo ratings yet
- Introduction To MSP430 MicrocontrollersDocument70 pagesIntroduction To MSP430 MicrocontrollersNarasimha Murthy YayavaramNo ratings yet
- Unit-I: CPLD & Fpga Architectures & ApplicationsDocument22 pagesUnit-I: CPLD & Fpga Architectures & ApplicationsNarasimha Murthy Yayavaram100% (5)
- MOS and BiCMOS Circuit Design ProcessDocument17 pagesMOS and BiCMOS Circuit Design ProcessNarasimha Murthy YayavaramNo ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 ArchitectureNarasimha Murthy YayavaramNo ratings yet
- Sensors Interfacing TechniquesDocument16 pagesSensors Interfacing TechniquesRaja VenkateshNo ratings yet
- Applications - Embedded SystemsDocument25 pagesApplications - Embedded SystemsNarasimha Murthy YayavaramNo ratings yet
- Introduction To VHDL ProgrammingDocument68 pagesIntroduction To VHDL ProgrammingNarasimha Murthy YayavaramNo ratings yet
- Basics of Peripheral Devices and WorkingDocument33 pagesBasics of Peripheral Devices and WorkingNarasimha Murthy Yayavaram100% (1)
- Control Systems - NotesDocument61 pagesControl Systems - NotesNarasimha Murthy YayavaramNo ratings yet
- Recent Advances in ElectronicsDocument73 pagesRecent Advances in ElectronicsNarasimha Murthy YayavaramNo ratings yet
- Introduction To MasmDocument13 pagesIntroduction To MasmNarasimha Murthy Yayavaram100% (2)
- Fiber Optic CommunicationsDocument23 pagesFiber Optic CommunicationsNarasimha Murthy YayavaramNo ratings yet
- Introduction To ASICsDocument53 pagesIntroduction To ASICsNarasimha Murthy YayavaramNo ratings yet
- Embedded Systems-UnitIDocument33 pagesEmbedded Systems-UnitINarasimha Murthy YayavaramNo ratings yet
- Introduction To 68HC11 MICROCONTROLLERDocument72 pagesIntroduction To 68HC11 MICROCONTROLLERNarasimha Murthy Yayavaram100% (3)
- 8096 Microcontrollers NotesDocument9 pages8096 Microcontrollers NotesNarasimha Murthy YayavaramNo ratings yet
- 8096 MicrocontrollerDocument51 pages8096 MicrocontrollerNarasimha Murthy Yayavaram67% (3)
- JO 20221109 NationalDocument244 pagesJO 20221109 NationalMark Leo BejeminoNo ratings yet
- str-w6754 Ds enDocument8 pagesstr-w6754 Ds enAdah BumbonNo ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
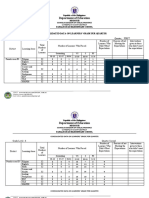
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- My BaboogDocument1 pageMy BaboogMaral Habeshian VieiraNo ratings yet
- SSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Document22 pagesSSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Ivy JeanneNo ratings yet
- Resume - James MathewsDocument2 pagesResume - James Mathewsapi-610738092No ratings yet
- .IAF-GD5-2006 Guide 65 Issue 3Document30 pages.IAF-GD5-2006 Guide 65 Issue 3bg_phoenixNo ratings yet
- G.Devendiran: Career ObjectiveDocument2 pagesG.Devendiran: Career ObjectiveSadha SivamNo ratings yet
- End-Of-Chapter Answers Chapter 7 PDFDocument12 pagesEnd-Of-Chapter Answers Chapter 7 PDFSiphoNo ratings yet
- 2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Document2 pages2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Edison LimNo ratings yet
- Fundasurv 215 Plate 1mDocument3 pagesFundasurv 215 Plate 1mKeith AtencioNo ratings yet
- Consecration of TalismansDocument5 pagesConsecration of Talismansdancinggoat23100% (1)
- IPA Smith Osborne21632Document28 pagesIPA Smith Osborne21632johnrobertbilo.bertilloNo ratings yet
- D E S C R I P T I O N: Acknowledgement Receipt For EquipmentDocument2 pagesD E S C R I P T I O N: Acknowledgement Receipt For EquipmentTindusNiobetoNo ratings yet
- 5620 SAM Rel 14 License Point Configuration ToolDocument416 pages5620 SAM Rel 14 License Point Configuration Toolluis100% (1)
- Installation 59TP6A 08SIDocument92 pagesInstallation 59TP6A 08SIHenry SmithNo ratings yet
- Names of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: KindergartenDocument4 pagesNames of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: Kindergartenapi-428128701No ratings yet
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletDocument2 pagesCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookNo ratings yet
- 'Causative' English Quiz & Worksheet UsingEnglish ComDocument2 pages'Causative' English Quiz & Worksheet UsingEnglish ComINAWATI BINTI AMING MoeNo ratings yet
- Uniform Motion WorksheetDocument8 pagesUniform Motion Worksheetnikhil patro100% (1)
- Department of Ece, Adhiparasakthi College of Engineering, KalavaiDocument31 pagesDepartment of Ece, Adhiparasakthi College of Engineering, KalavaiGiri PrasadNo ratings yet
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDocument24 pages(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6No ratings yet
- Object Oriented ParadigmDocument2 pagesObject Oriented ParadigmDickson JohnNo ratings yet
- RSW - F - 01 " ": Building UtilitiesDocument4 pagesRSW - F - 01 " ": Building Utilities62296bucoNo ratings yet
- Six Sigma PresentationDocument17 pagesSix Sigma PresentationDhular HassanNo ratings yet
- File RecordsDocument161 pagesFile RecordsAtharva Thite100% (2)
- Stability Analysis of Geocell Reinforced Slopes by Considering Bending EffectDocument13 pagesStability Analysis of Geocell Reinforced Slopes by Considering Bending EffectRakesh KapoorNo ratings yet
- Cameron International Corporation: FORM 10-KDocument31 pagesCameron International Corporation: FORM 10-KMehdi SoltaniNo ratings yet