You might also like
- MS Mexico Conformity To UL1741&IEEE1547Document4 pagesMS Mexico Conformity To UL1741&IEEE1547carlosNo ratings yet
- HV Protection Relays Setting Calculation Rev-4Document58 pagesHV Protection Relays Setting Calculation Rev-4raza23988% (16)
- Photocell DIELL AX80Document3 pagesPhotocell DIELL AX80melad yousefNo ratings yet
- Cassette 60 HZ R410A: CK41D 036 3N1C CK41D 048 3N1C CK41D 060 3N1CDocument1 pageCassette 60 HZ R410A: CK41D 036 3N1C CK41D 048 3N1C CK41D 060 3N1CcatherinejaramilloNo ratings yet
- Final CFD Literature Review Report - D1 - External CFDDocument167 pagesFinal CFD Literature Review Report - D1 - External CFDSiti Rohani IsdrisNo ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- Ism LabDocument67 pagesIsm LabpadmavathiNo ratings yet
- Hef 4752Document9 pagesHef 4752onlyvinod56No ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotorVaibhavNo ratings yet
- T2117 - Zero-Voltage Switch With Adjustable RampDocument16 pagesT2117 - Zero-Voltage Switch With Adjustable Rampapaixao666No ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Induction Motor Drive PDFDocument8 pagesInduction Motor Drive PDFSwostik RoutNo ratings yet
- Lab ManualDocument38 pagesLab ManualsivaNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- Zero-Voltage Switch With Adjustable Ramp: DescriptionDocument11 pagesZero-Voltage Switch With Adjustable Ramp: DescriptionTorzsok JozsefNo ratings yet
- Datasheet T2117Document16 pagesDatasheet T2117Radovan RasaNo ratings yet
- Bala ControlDocument74 pagesBala ControlNiranjan NeruNo ratings yet
- TB6588FG Usage Considerations: 1. Absolute Maximum RatingsDocument10 pagesTB6588FG Usage Considerations: 1. Absolute Maximum RatingsElton RibeiroNo ratings yet
- Working Principle of The Inverter SystemDocument10 pagesWorking Principle of The Inverter Systemolawale gbadeboNo ratings yet
- Exp 2Document6 pagesExp 2DHINESH JNo ratings yet
- Get Homework/Assignment DoneDocument61 pagesGet Homework/Assignment DoneHadiGunaNo ratings yet
- P.E - 16MDocument16 pagesP.E - 16M20EUEE053- MADHUBALAN.SNo ratings yet
- Instruction Manual: Compact InverterDocument16 pagesInstruction Manual: Compact InvertersuradyNo ratings yet
- D Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various ProtectionsDocument6 pagesD Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various Protectionsঅর্ণব কোলেNo ratings yet
- Laboratory Report Cover SheetDocument15 pagesLaboratory Report Cover SheetPreet PatelNo ratings yet
- 8 3-Ph. Ind Motor Starting & Speed ControlDocument26 pages8 3-Ph. Ind Motor Starting & Speed ControlFos AlharbiNo ratings yet
- 235 Separation of Iron Losses in 3 PH TransformerDocument6 pages235 Separation of Iron Losses in 3 PH TransformerNikhilNo ratings yet
- Eca Lab-Manual PDFDocument87 pagesEca Lab-Manual PDFdedoga9086No ratings yet
- Alternator LSA42.3j enDocument12 pagesAlternator LSA42.3j enArdi Wiranata PermadiNo ratings yet
- U217BDocument11 pagesU217BAnonymous JR1LSmN0sNo ratings yet
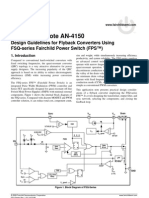
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemNo ratings yet
- Icl 8038 DataDocument10 pagesIcl 8038 DataTushar Kanti BeraNo ratings yet
- LM331 VFCDocument15 pagesLM331 VFCfmsanturioNo ratings yet
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- EM-II FinalDocument57 pagesEM-II FinalAtchyut Satya KumarNo ratings yet
- Exp 5Document6 pagesExp 5DHINESH JNo ratings yet
- Power Electronics 2-MDocument9 pagesPower Electronics 2-M20EUEE053- MADHUBALAN.SNo ratings yet
- Induction Motor Part-4Document34 pagesInduction Motor Part-4Jay PatelNo ratings yet
- 2 Lva1 App6891Document13 pages2 Lva1 App6891gouravNo ratings yet
- EE3411 EM-II Lab Manual FinalDocument71 pagesEE3411 EM-II Lab Manual FinalManoj KumarNo ratings yet
- Exp 1Document6 pagesExp 1DHINESH JNo ratings yet
- Leroy Somer LSA 40-4Document12 pagesLeroy Somer LSA 40-4lanspainNo ratings yet
- Agn093 C 8Document15 pagesAgn093 C 8Xfuji GarNo ratings yet
- Ec-I Lab MannualDocument30 pagesEc-I Lab Mannualsmaran247017No ratings yet
- SolarPowerConverters CLA Lascu PDFDocument119 pagesSolarPowerConverters CLA Lascu PDFIorgoni LiviuNo ratings yet
- Low Voltage Alternators - 4 Pole LSA 42.3: 25 To 60 kVA - 50 HZ / 31.5 To 75 kVA - 60 HZDocument12 pagesLow Voltage Alternators - 4 Pole LSA 42.3: 25 To 60 kVA - 50 HZ / 31.5 To 75 kVA - 60 HZhafid CJSPNo ratings yet
- Steady-State Analysis of DC MotorsDocument24 pagesSteady-State Analysis of DC MotorsUsama RaoNo ratings yet
- Thishelps 6or12pulsesDocument7 pagesThishelps 6or12pulsespearzinNo ratings yet
- EE-442-642-DC-to-AC Converters PDFDocument34 pagesEE-442-642-DC-to-AC Converters PDFLai Viet ThangNo ratings yet
- NTE864 Integrated Circuit Precision Waveform Generator: DescriptionDocument4 pagesNTE864 Integrated Circuit Precision Waveform Generator: Descriptiondramirez0916No ratings yet
- CSLABMANUALDocument99 pagesCSLABMANUALGOKUL RNo ratings yet
- Bee Lab Manual R19Document25 pagesBee Lab Manual R19Sudharshan ChennupalliNo ratings yet
- 1.K&H Pe-5000Document12 pages1.K&H Pe-5000FARUQ SAMNo ratings yet
- EEN-302 Electric Drives Electrical Engineering Department Indian Institute of Technology, RoorkeeDocument2 pagesEEN-302 Electric Drives Electrical Engineering Department Indian Institute of Technology, RoorkeeSaksham SinghalNo ratings yet
- Em-Ii ExperimentDocument19 pagesEm-Ii Experimentprince rajNo ratings yet
- Experiment 8Document3 pagesExperiment 8buhbabfNo ratings yet
- UC3842 DesignDocument7 pagesUC3842 DesignCui BapNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- 6FX3002 5CL12 1ca0Document2 pages6FX3002 5CL12 1ca0melad yousefNo ratings yet
- 6FX3002 5BL03 1ba0Document2 pages6FX3002 5BL03 1ba0melad yousefNo ratings yet
- 1FL6096 1ac61 2aa1Document2 pages1FL6096 1ac61 2aa1melad yousefNo ratings yet
- 6FX3002 5CL12 1ba0Document2 pages6FX3002 5CL12 1ba0melad yousefNo ratings yet
- 1FL6092-1AC61-0AB1 Paper Rod LiftingDocument2 pages1FL6092-1AC61-0AB1 Paper Rod Liftingmelad yousefNo ratings yet
- Zelio Control - RM35TF30Document7 pagesZelio Control - RM35TF30melad yousefNo ratings yet
- Electric Quarter Turn Actuator: Flange F04 F05 F07Document2 pagesElectric Quarter Turn Actuator: Flange F04 F05 F07melad yousefNo ratings yet
- 6FX3002 5BL02 1ba0Document2 pages6FX3002 5BL02 1ba0melad yousefNo ratings yet
- S7basecomm Xsend Doku v10 eDocument29 pagesS7basecomm Xsend Doku v10 emelad yousefNo ratings yet
- Profibus Adapter Npba-02 Option/Sp Profibus Adapter Npba-02 Option/SpDocument3 pagesProfibus Adapter Npba-02 Option/Sp Profibus Adapter Npba-02 Option/Spmelad yousefNo ratings yet
- AWG Wires FlyerDocument2 pagesAWG Wires Flyermelad yousefNo ratings yet
- Cost Effective Monitoring and Automation of Concrete Plant Using PLCDocument10 pagesCost Effective Monitoring and Automation of Concrete Plant Using PLCmelad yousefNo ratings yet
- 2018 ReuseoftheConcreteDocument8 pages2018 ReuseoftheConcretemelad yousefNo ratings yet
- Schoppe & Faeser Pressure Transmitter Model: Asd 800Document4 pagesSchoppe & Faeser Pressure Transmitter Model: Asd 800melad yousefNo ratings yet
- Type L6G Load Cell: Short DescriptionDocument3 pagesType L6G Load Cell: Short Descriptionmelad yousefNo ratings yet
- Data Sheet 6ES7431-1KF20-0AB0: Supply VoltageDocument3 pagesData Sheet 6ES7431-1KF20-0AB0: Supply Voltagemelad yousefNo ratings yet
- Infrared Photodetector Installation, Use and Maintenance ManualDocument20 pagesInfrared Photodetector Installation, Use and Maintenance Manualmelad yousefNo ratings yet
- ATS01N232QN: Product DatasheetDocument5 pagesATS01N232QN: Product Datasheetmelad yousefNo ratings yet
- Standard, With Plastic Cable Gland Type 31160-NN Magnetic Switch, Change-Over, BistableDocument1 pageStandard, With Plastic Cable Gland Type 31160-NN Magnetic Switch, Change-Over, Bistablemelad yousefNo ratings yet
- Data Sheet 6ES7322-1BL00-0AA0: Supply VoltageDocument3 pagesData Sheet 6ES7322-1BL00-0AA0: Supply Voltagemelad yousefNo ratings yet
- Data Sheet 6ES7431-1KF20-0AB0: Supply VoltageDocument3 pagesData Sheet 6ES7431-1KF20-0AB0: Supply Voltagemelad yousefNo ratings yet
- PTX 510 and PTX 510/IS: Industrial Pressure TransmitterDocument2 pagesPTX 510 and PTX 510/IS: Industrial Pressure Transmittermelad yousefNo ratings yet
- Y2K XTEL CompatibilityDocument4 pagesY2K XTEL Compatibilitymelad yousefNo ratings yet
- Tsxpaccc01 PDFDocument18 pagesTsxpaccc01 PDFmelad yousefNo ratings yet
- Photocell DIELL AX100Document3 pagesPhotocell DIELL AX100melad yousefNo ratings yet
- Benefit of Converting To Rslogix 5000 From Rslogix 500: Richard P. Crum, Jayme L. Davis, and Peter J. ShullDocument7 pagesBenefit of Converting To Rslogix 5000 From Rslogix 500: Richard P. Crum, Jayme L. Davis, and Peter J. Shullmelad yousefNo ratings yet
- Standards A2ZDocument112 pagesStandards A2ZkrristinNo ratings yet
- ME 230 Kinematics and Dynamics: Wei-Chih WangDocument86 pagesME 230 Kinematics and Dynamics: Wei-Chih WanggNo ratings yet
- 1 Electric Injection System - Chery Tiggo T11Document87 pages1 Electric Injection System - Chery Tiggo T11limadacarlosNo ratings yet
- NETA Test FrequencyDocument5 pagesNETA Test Frequencytimothynguyen2012No ratings yet
- Taller 3 Mecanica de FluidosDocument2 pagesTaller 3 Mecanica de FluidosRene AlvarezNo ratings yet
- Spohn FerencDocument29 pagesSpohn Ferencemy1188No ratings yet
- Assignment 1 With Solution PDFDocument5 pagesAssignment 1 With Solution PDFbrip selNo ratings yet
- Magnetism and ElectromagnetismDocument11 pagesMagnetism and Electromagnetismsohaila ibrahimNo ratings yet
- Operation and Simulation of Three Phase Inverter With 120°, 150° and 180° Conduction ModeDocument7 pagesOperation and Simulation of Three Phase Inverter With 120°, 150° and 180° Conduction ModeSarthak PandeyNo ratings yet
- SI FM 2e SM Chap06Document74 pagesSI FM 2e SM Chap06ttaerack80% (5)
- Science: Standard NineDocument336 pagesScience: Standard NineramakaniNo ratings yet
- System Operation Memorandum T-08Document12 pagesSystem Operation Memorandum T-08xabproject100% (1)
- Measurement System BehaviorDocument39 pagesMeasurement System BehaviorM. Sya'banur RozaqNo ratings yet
- DEHNpipe DEHNpipe Arrester Series ForDocument21 pagesDEHNpipe DEHNpipe Arrester Series ForkpeNo ratings yet
- Volumes: GradeDocument8 pagesVolumes: Gradebipin jainNo ratings yet
- Graphical Representation of The Progressive Wave (Or) Travelling WaveDocument5 pagesGraphical Representation of The Progressive Wave (Or) Travelling WaveLarry MostolesNo ratings yet
- 8 Forms of Energy: Heat Is A Form of Energy That Can Be Transferred From OneDocument4 pages8 Forms of Energy: Heat Is A Form of Energy That Can Be Transferred From OneAngeline Flare MarantalNo ratings yet
- Phy502repDocument10 pagesPhy502repRahul MishraNo ratings yet
- Transformer WorkshopDocument44 pagesTransformer Workshopniyaz100% (3)
- Refrigeration and Air ConditioningDocument50 pagesRefrigeration and Air ConditioningAaquib Mahfuz100% (1)
- AP Physc em Inductance Free Response Problems 2015-04-09Document12 pagesAP Physc em Inductance Free Response Problems 2015-04-09Alex2345660No ratings yet
- Calculating Solar Power Requirements TTDocument7 pagesCalculating Solar Power Requirements TTtilahun temechewNo ratings yet
- Power Electronics News July 2021 Proposal Design V4Document33 pagesPower Electronics News July 2021 Proposal Design V4ViaNo ratings yet
- Adiabatic and Entropy Perturbations in Cosmology: Christopher GordonDocument74 pagesAdiabatic and Entropy Perturbations in Cosmology: Christopher GordonGustavo ArciniegaNo ratings yet
- ch7 ClickerDocument24 pagesch7 ClickerElijah Fren LubianoNo ratings yet
- Section Factors HPADocument16 pagesSection Factors HPATanmay GorNo ratings yet