You might also like
- Bishnu Hazra - Ece - Pe-Ec505c - 5THDocument21 pagesBishnu Hazra - Ece - Pe-Ec505c - 5THDevNo ratings yet
- Chapter 1 First-Order CircuitsDocument16 pagesChapter 1 First-Order CircuitsCraig PeriNo ratings yet
- AM CircuitsDocument13 pagesAM CircuitsFahad Ansari 20-296No ratings yet
- Switching Modulator: Working Operation and AnalysisDocument3 pagesSwitching Modulator: Working Operation and AnalysisgajulasureshNo ratings yet
- Experiment 4 Dynamic Response of Temperature Measuring Devices (Transient Heat Transfer)Document6 pagesExperiment 4 Dynamic Response of Temperature Measuring Devices (Transient Heat Transfer)praful2604No ratings yet
- Lab 1 PDFDocument4 pagesLab 1 PDFTanmay KumarNo ratings yet
- Lecture 05 The Phasors and Some ExamplesDocument23 pagesLecture 05 The Phasors and Some ExamplesBushra Azmat Qureshi Bushra AzmatNo ratings yet
- ELEC3400 Signal Processing Course NotesDocument68 pagesELEC3400 Signal Processing Course NotesCallan Fair BearNo ratings yet
- Lecture 9 and 10Document13 pagesLecture 9 and 10Hyder GamingNo ratings yet
- 8 - L-17 (NKD) (Pe) ( (Ee) Nptel)Document1 page8 - L-17 (NKD) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Alternating Current RL Circuits: 1 ObjectivesDocument7 pagesAlternating Current RL Circuits: 1 ObjectivesElliott M.No ratings yet
- Transients in R-L Circuits: Fault AnalysisDocument5 pagesTransients in R-L Circuits: Fault AnalysisOkwalNo ratings yet
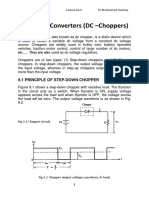
- Analysis of Buck Converter (DC-DC) Circuit: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument10 pagesAnalysis of Buck Converter (DC-DC) Circuit: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesRizwan AliNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- Single Phase Series InverterDocument9 pagesSingle Phase Series InverterDhivya NNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesgopalgeniusNo ratings yet
- PE Lecture No.09Document16 pagesPE Lecture No.09Nikhil GobhilNo ratings yet
- PT2 (18 Pages)Document19 pagesPT2 (18 Pages)sampath kumarNo ratings yet
- DC ChoppersDocument94 pagesDC ChoppersRaghu Raman100% (3)
- Symmetrical Semi ConverterDocument4 pagesSymmetrical Semi ConverterAdi JohnsonNo ratings yet
- Sinusoidal WaveformsDocument19 pagesSinusoidal WaveformsAshlee VNo ratings yet
- Experiment-2 For 21-08-2021Document4 pagesExperiment-2 For 21-08-2021dummy008No ratings yet
- Lab 6Document4 pagesLab 6JAGADISH TRIPATHYNo ratings yet
- Lecture 02Document21 pagesLecture 02Abd El-Rahman DabbishNo ratings yet
- Partial Differenntiation Purdue Chapter 7Document11 pagesPartial Differenntiation Purdue Chapter 7Yap Yih ShanNo ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- MSC Rectifier CorrectedDocument53 pagesMSC Rectifier CorrectedashammoudaNo ratings yet
- 03 Chapter 03Document27 pages03 Chapter 03Negar SatvatNo ratings yet
- 6 - Dc-AcDocument87 pages6 - Dc-AcDmitrii FedorovNo ratings yet
- 01 Electrical Parameter Periodic WaveDocument15 pages01 Electrical Parameter Periodic WaveYash MotianiNo ratings yet
- One and Two Quadrant Choppers: Quadrants. Most of The Non-Isolated DC/DC Converters Provide An AdjustedDocument16 pagesOne and Two Quadrant Choppers: Quadrants. Most of The Non-Isolated DC/DC Converters Provide An AdjusteddevchandarNo ratings yet
- 02 - MEE10603 - Fourier Series and Power Computations in Nonsinusoidally Driven CircuitsDocument33 pages02 - MEE10603 - Fourier Series and Power Computations in Nonsinusoidally Driven CircuitsMohammad HayazieNo ratings yet
- PE Lecture No.11Document13 pagesPE Lecture No.11oscarNo ratings yet
- 2 Rangkaian Penyesuai ImpedansiDocument9 pages2 Rangkaian Penyesuai ImpedansiDicky DarmawanNo ratings yet
- Transient Analysis For RL NetworkDocument7 pagesTransient Analysis For RL NetworkVishal KokateNo ratings yet
- Single Phase Fully Controlled Bridge ConverterDocument6 pagesSingle Phase Fully Controlled Bridge ConverterBala Kumar100% (1)
- Polyphase Induction Machines: Principle of OperationDocument10 pagesPolyphase Induction Machines: Principle of OperationPrakash KumarNo ratings yet
- ModulationDocument5 pagesModulationAbdelilah KerouichNo ratings yet
- Lecture 1 1Document15 pagesLecture 1 1nehaNo ratings yet
- Symmetrical Faults PDFDocument27 pagesSymmetrical Faults PDFHassan LalaNo ratings yet
- Circuit Elements' I-V Relationships in The Phasor Domain: Week 8Document37 pagesCircuit Elements' I-V Relationships in The Phasor Domain: Week 8fullmetal AesirNo ratings yet
- EE-101 (Module - 3) (Week - 1) : Vivek AgarwalDocument49 pagesEE-101 (Module - 3) (Week - 1) : Vivek AgarwalDiptashree BanerjeeNo ratings yet
- Review of Power Electronics-Chapter - 6Document17 pagesReview of Power Electronics-Chapter - 6ee mce dataNo ratings yet
- Chapter2 - AC To DC ConvertersDocument36 pagesChapter2 - AC To DC ConvertersYee Yen AppleNo ratings yet
- DET40073 - Topic 3Document97 pagesDET40073 - Topic 3KuhaanProNo ratings yet
- EECE105L 2021 Part1Document119 pagesEECE105L 2021 Part1Shreyansh GargNo ratings yet
- A Study On The Inrush Current Phenomena in Transformer SubstationsDocument8 pagesA Study On The Inrush Current Phenomena in Transformer SubstationsCornel ArageaNo ratings yet
- 11 Chapter 3Document23 pages11 Chapter 3sathishNo ratings yet
- L7-L9 DC ChopperDocument103 pagesL7-L9 DC Choppersrnankit100% (1)
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- 44968911-Exp-1 PSIMDocument35 pages44968911-Exp-1 PSIMJorge CasaliniNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document7 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Lec 9Document27 pagesLec 9ahmed ragabNo ratings yet
- Overlap in Rectifiers Overlap in Rectifiers: Advance Power Electronics Advance Power ElectronicsDocument10 pagesOverlap in Rectifiers Overlap in Rectifiers: Advance Power Electronics Advance Power ElectronicsJunaid AlviNo ratings yet
- Fourier Transforms3Document39 pagesFourier Transforms3dwiaryantaNo ratings yet
- Transformer: School of Computer and Communication Engineering, UnimapDocument53 pagesTransformer: School of Computer and Communication Engineering, UnimapRajeev Valunjkar100% (1)
- 2 Alternating CurrentsDocument23 pages2 Alternating CurrentsKunalWadhawanNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- S1Document8 pagesS1Ratheesh KumarNo ratings yet
- Apendix C 1 Interface A Seven Segment Display To An ArduinoDocument5 pagesApendix C 1 Interface A Seven Segment Display To An ArduinoCharles RobiansyahNo ratings yet
- Apendix C2 Seven Segmen Cek 0-9 1234 Reev1jul17Document6 pagesApendix C2 Seven Segmen Cek 0-9 1234 Reev1jul17Charles RobiansyahNo ratings yet
- Presentation 1Document4 pagesPresentation 1Charles RobiansyahNo ratings yet
- (Eptco) Basic Engineering & Detail Engineering Work For Fuel Storage Tank - ElectricalDocument6 pages(Eptco) Basic Engineering & Detail Engineering Work For Fuel Storage Tank - ElectricalCharles Robiansyah50% (2)
- Apendix B Alarm 1sensor Dan 2sensorDocument5 pagesApendix B Alarm 1sensor Dan 2sensorCharles RobiansyahNo ratings yet
- Apendix A Skema I-O Arduino Modul Praktek HZDocument2 pagesApendix A Skema I-O Arduino Modul Praktek HZCharles RobiansyahNo ratings yet
- Inspection & Test Plan Key Valve Interlocks: To BS EN ISO 9001: 2008Document2 pagesInspection & Test Plan Key Valve Interlocks: To BS EN ISO 9001: 2008Charles RobiansyahNo ratings yet
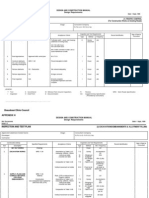
- Inspection and Test Plans: Engineering (General) ProcedureDocument9 pagesInspection and Test Plans: Engineering (General) ProcedureCharles RobiansyahNo ratings yet
- 4 PRAKTEK Rev 3agustus17Document7 pages4 PRAKTEK Rev 3agustus17Charles RobiansyahNo ratings yet
- B - 7.21 - ITP For Control ValveDocument2 pagesB - 7.21 - ITP For Control ValveCharles RobiansyahNo ratings yet
- Design and Construction ManualDocument17 pagesDesign and Construction ManualYaser A. Al-BustanjiNo ratings yet
- Inspection & Test Plan For Control Valve: Project: PP Pe Pilot PlantDocument3 pagesInspection & Test Plan For Control Valve: Project: PP Pe Pilot PlantzsmithNo ratings yet
- ITP Instrument-Cover EXAMPLEDocument6 pagesITP Instrument-Cover EXAMPLECharles RobiansyahNo ratings yet
- Drawings For MV Switchgear: Unigear Zs1Document12 pagesDrawings For MV Switchgear: Unigear Zs1Charles RobiansyahNo ratings yet
- 175 184Document10 pages175 184Yousif_AbdalhalimNo ratings yet
- Harga Tower Monopole 15 Meter - GudangTower - 1Document3 pagesHarga Tower Monopole 15 Meter - GudangTower - 1Charles RobiansyahNo ratings yet
- Appendix B Motorola R56!09!01 05Document34 pagesAppendix B Motorola R56!09!01 05Ramesh AnanthanarayananNo ratings yet
- ZS1 - Technical Specification 2019 Rev0Document24 pagesZS1 - Technical Specification 2019 Rev0Charles RobiansyahNo ratings yet
- Harga Tower Monopole 15 Meter - GudangTowerDocument3 pagesHarga Tower Monopole 15 Meter - GudangTowerCharles RobiansyahNo ratings yet
- Jual Soil Resistivity Test - Kota Tangerang Selatan - Rafindo Furse - TokopediaDocument2 pagesJual Soil Resistivity Test - Kota Tangerang Selatan - Rafindo Furse - TokopediaCharles RobiansyahNo ratings yet
- Commissioning Tests For HV Underground Cables (Up To 33Kv) SWPDocument13 pagesCommissioning Tests For HV Underground Cables (Up To 33Kv) SWPCharles Robiansyah100% (1)
- Commissioning Major Electrical Systems: Pdhonline Course E409 (6 PDH)Document78 pagesCommissioning Major Electrical Systems: Pdhonline Course E409 (6 PDH)Dinesh TaragiNo ratings yet
- Commissioning and Acceptance TestsDocument4 pagesCommissioning and Acceptance TestsCharles RobiansyahNo ratings yet
- HV Pressure TestsDocument4 pagesHV Pressure TestsCharles RobiansyahNo ratings yet
- Pre-Commissioning Tests and ChecksDocument2 pagesPre-Commissioning Tests and ChecksCharles RobiansyahNo ratings yet
- Chapter 6 Digital Output Circuit: FollowingDocument9 pagesChapter 6 Digital Output Circuit: FollowingCharles RobiansyahNo ratings yet
- BEE047 PSOC NotesDocument90 pagesBEE047 PSOC NotesCharles RobiansyahNo ratings yet
- Testing & Commissioning Procedure (Electrical)Document100 pagesTesting & Commissioning Procedure (Electrical)Roland Nicolas100% (1)
- BRUSH PRISMIC Brochure - 11Document8 pagesBRUSH PRISMIC Brochure - 11Charles RobiansyahNo ratings yet
- Model: P660 Series: Differential Pressure Gauge With Diaphragm ElementDocument6 pagesModel: P660 Series: Differential Pressure Gauge With Diaphragm ElementTÀi VÕNo ratings yet
- Disa Match: A Match You Can Count OnDocument8 pagesDisa Match: A Match You Can Count OngNo ratings yet
- Scientific Exploration and Expeditions PDFDocument406 pagesScientific Exploration and Expeditions PDFana_petrescu100% (2)
- Most Important One Liner Questions and Answers May 2022Document15 pagesMost Important One Liner Questions and Answers May 2022pradeepNo ratings yet
- 2014 An125hkl4Document69 pages2014 An125hkl4El Turco ChalabeNo ratings yet
- Primary Three Exam Question.Document17 pagesPrimary Three Exam Question.ogidan preciousNo ratings yet
- 9446 - Data Sheets Final PDFDocument17 pages9446 - Data Sheets Final PDFmarounNo ratings yet
- AdPoe The Hunting of The HareDocument2 pagesAdPoe The Hunting of The HarePI CubingNo ratings yet
- AVR Brosure Basler Decs 100Document2 pagesAVR Brosure Basler Decs 100NikolayNo ratings yet
- Web+Presentation+12+July+2016 EA+-+Eric+LumeDocument57 pagesWeb+Presentation+12+July+2016 EA+-+Eric+LumetranthabinNo ratings yet
- Monk - Way of The Elements RevisedDocument3 pagesMonk - Way of The Elements Revisedluigipokeboy0% (1)
- Introduction To Reproduction PDFDocument8 pagesIntroduction To Reproduction PDFLmssvNo ratings yet
- Column c4 From 3rd FloorDocument1 pageColumn c4 From 3rd Floor1man1bookNo ratings yet
- The Influence of School Architecture and Design On The Outdoor Play Experience Within The Primary SchoolDocument20 pagesThe Influence of School Architecture and Design On The Outdoor Play Experience Within The Primary SchoolAnca BalotaNo ratings yet
- Fatigue Consideration in DesignDocument3 pagesFatigue Consideration in DesigngouthamNo ratings yet
- TR189 Kathuria PDFDocument168 pagesTR189 Kathuria PDFuqiNo ratings yet
- Solomon On Sex - Avoiding Marital Disaster: February 12, 2012Document14 pagesSolomon On Sex - Avoiding Marital Disaster: February 12, 2012baimareanNo ratings yet
- Primakuro Catalogue Preview16-MinDocument10 pagesPrimakuro Catalogue Preview16-MinElizabeth LukitoNo ratings yet
- Kiss Forex How To Trade Ichimoku PDFDocument72 pagesKiss Forex How To Trade Ichimoku PDFSastryassociates Chartered100% (3)
- High Performance Dialysis GuideDocument28 pagesHigh Performance Dialysis GuideRoxana ElenaNo ratings yet
- NCERT Solutions For Class 12 Maths Chapter 10 Vector AlgebraDocument51 pagesNCERT Solutions For Class 12 Maths Chapter 10 Vector AlgebraKavin .J.S (KingK)No ratings yet
- Smart Watch User Manual: Please Read The Manual Before UseDocument9 pagesSmart Watch User Manual: Please Read The Manual Before Useeliaszarmi100% (3)
- Modular Air Handling Unit (FMA)Document3 pagesModular Air Handling Unit (FMA)Salamet TeguhNo ratings yet
- Modern Views Catalogue/Sotheby's BenefitDocument36 pagesModern Views Catalogue/Sotheby's BenefitStudio AdjayeNo ratings yet
- Indigo Airlines - Final ReportDocument22 pagesIndigo Airlines - Final Reportanand_lihinarNo ratings yet
- Ieee 802Document3 pagesIeee 802M Zubair AslamNo ratings yet
- Menstrupedia Comic: The Friendly Guide To Periods For Girls (2014), by Aditi Gupta, Tuhin Paul, and Rajat MittalDocument4 pagesMenstrupedia Comic: The Friendly Guide To Periods For Girls (2014), by Aditi Gupta, Tuhin Paul, and Rajat MittalMy Home KaviNo ratings yet
- Deva Surya - 19MF02Document30 pagesDeva Surya - 19MF02SaravananNo ratings yet
- Estimation of Fire Loads For An Educational Building - A Case StudyDocument4 pagesEstimation of Fire Loads For An Educational Building - A Case StudyEditor IJSETNo ratings yet
- Dinacharya HandbookDocument5 pagesDinacharya Handbookvera sirakovaNo ratings yet