You might also like
- Maths Cheat SheetDocument3 pagesMaths Cheat SheetMinn Thiha ChitNo ratings yet
- MIdterm SolDocument3 pagesMIdterm Sol백승헌No ratings yet
- Assignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0Document5 pagesAssignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0prasobhaNo ratings yet
- Math Kulim QuesDocument8 pagesMath Kulim Queskashvina paramjothyNo ratings yet
- Advance Mathematical PhysicsDocument6 pagesAdvance Mathematical PhysicsRaufAhmedNo ratings yet
- Degree Formula SheetDocument5 pagesDegree Formula SheetHai Liang OngNo ratings yet
- FEM Continum Overview and SolutionDocument22 pagesFEM Continum Overview and Solutionsubash sahNo ratings yet
- Integration of PowersDocument2 pagesIntegration of PowersRoan PariñasNo ratings yet
- MECH380 - Take Home Quiz - 1 - SolutionDocument7 pagesMECH380 - Take Home Quiz - 1 - SolutionvjscricNo ratings yet
- Solved Problems From Module 2Document19 pagesSolved Problems From Module 2Likith AkashNo ratings yet
- Universidad Nacional Autónoma de México: FormularioDocument10 pagesUniversidad Nacional Autónoma de México: FormularioLuis Mauricio Aguilar MunguíaNo ratings yet
- Elementos de Física 2019 - 2020 FormulárioDocument2 pagesElementos de Física 2019 - 2020 FormulárioTeresa GranjeiaNo ratings yet
- Phy 311 Classical Mechanics & Relativity Assignment # 2Document3 pagesPhy 311 Classical Mechanics & Relativity Assignment # 2Alex William JohnNo ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- Formula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Document4 pagesFormula Sheet For ESE in CVT Fall 2022 Semester Updated On 1-1-2023Zain AhmedNo ratings yet
- Internal Assignment: Name Sneha SankhlaDocument10 pagesInternal Assignment: Name Sneha SankhlaSneha SankhlaNo ratings yet
- 2020 JunhoDocument58 pages2020 JunhoVaquinhaLoucaNo ratings yet
- Formula Sheet - EM1 - EM2Document12 pagesFormula Sheet - EM1 - EM2Ziyang XieNo ratings yet
- H WorkAnalyseFinalDocument22 pagesH WorkAnalyseFinalHardy MazonoNo ratings yet
- Ejercicios Dinamica AuxiliaturaDocument22 pagesEjercicios Dinamica AuxiliaturaEric cumalyNo ratings yet
- Compton Effect DerivationDocument8 pagesCompton Effect Derivation12G 18 Twinkle Meziah ANo ratings yet
- Heat and Mass TransferDocument10 pagesHeat and Mass TransferAnonymous OrhjVLXO5sNo ratings yet
- Hoja de FórmulasDocument4 pagesHoja de FórmulasagusdanessaNo ratings yet
- Formulario Electromagnetismo I ParcialDocument2 pagesFormulario Electromagnetismo I Parcialjhonny gonzalezNo ratings yet
- 2021 Nov A P1 Pure Mathematics Suggested Marking Guide by The TrotterDocument25 pages2021 Nov A P1 Pure Mathematics Suggested Marking Guide by The TrotterTakunda ChechitaNo ratings yet
- Eqs - PHYN03 Beson Physique 3Document2 pagesEqs - PHYN03 Beson Physique 3Tristan RollandNo ratings yet
- SolutionsDocument3 pagesSolutionspouyanorouzi48No ratings yet
- Internal Assignment: Name Sneha SankhlaDocument4 pagesInternal Assignment: Name Sneha SankhlaSneha SankhlaNo ratings yet
- An Example of Numerical AnalysisDocument20 pagesAn Example of Numerical AnalysisAvranshu MahantyNo ratings yet
- 4.3 Further Worked Problems On Differentiation of Parametric EquationsDocument4 pages4.3 Further Worked Problems On Differentiation of Parametric EquationsJericho CunananNo ratings yet
- 2D Model Monoatomic ChainDocument29 pages2D Model Monoatomic ChainM Irfan100% (1)
- Lecture 5Document4 pagesLecture 5Saadnan TahsinNo ratings yet
- RIO - DE Special Proj - DigitalDocument16 pagesRIO - DE Special Proj - Digital22-09304No ratings yet
- Deflection of Beams Exercise Sheet SolutionsDocument15 pagesDeflection of Beams Exercise Sheet Solutions周暐凱No ratings yet
- Pauta Prueba Calculo AvanzadoDocument4 pagesPauta Prueba Calculo Avanzadofrancisco peñaNo ratings yet
- Edexcel A Level Maths Inverse Formula SheetDocument2 pagesEdexcel A Level Maths Inverse Formula Sheetjanusiva1406No ratings yet
- Online Lecture - Module 8 - 01 November 2023Document6 pagesOnline Lecture - Module 8 - 01 November 2023Israt ZamanNo ratings yet
- FORMULA SHEET Structural DynamicsDocument5 pagesFORMULA SHEET Structural Dynamicsgen ridan100% (3)
- Equation Sheet SemesterDocument2 pagesEquation Sheet SemesterakNo ratings yet
- FormulasDocument9 pagesFormulasHin Wa LeungNo ratings yet
- 9.4 Integration With Trigonometric FunctionsDocument17 pages9.4 Integration With Trigonometric FunctionsHin Wa LeungNo ratings yet
- زبدة التحصيلي 2021Document31 pagesزبدة التحصيلي 2021hexicutieNo ratings yet
- Simusoidal Circuits and RLC CircuitsDocument20 pagesSimusoidal Circuits and RLC CircuitsIbrahim GhunaimNo ratings yet
- 0 de AssignmentDocument10 pages0 de AssignmentAndrei HareNo ratings yet
- TrigonometriaDocument2 pagesTrigonometriaFelipe RetamalNo ratings yet
- C2 Essentials: Summary of AQA Core 2 Content Not Provided in The Formula BookDocument1 pageC2 Essentials: Summary of AQA Core 2 Content Not Provided in The Formula BookNyasha GweruNo ratings yet
- Diffusion From A Point Source in A Moving StreamDocument2 pagesDiffusion From A Point Source in A Moving StreamDzuhri Ferianto0% (1)
- RLC AcDocument16 pagesRLC AcMerugu JyothiNo ratings yet
- To Study The Fourier Series and Transform by Using OscilloscopeDocument5 pagesTo Study The Fourier Series and Transform by Using OscilloscopeSagar RawalNo ratings yet
- Addedup FormulasDocument6 pagesAddedup Formulas19-MCE-30 Usama manzoorNo ratings yet
- Analysis of Symmetrical Waveforms: Odd SymmetryDocument31 pagesAnalysis of Symmetrical Waveforms: Odd SymmetryLoku VelNo ratings yet
- Quaternionic Holomorphicity VerificationDocument4 pagesQuaternionic Holomorphicity VerificationBenjamin Brown100% (1)
- Trigonometric Identities Sept 2017Document2 pagesTrigonometric Identities Sept 2017Beatrice DomenNo ratings yet
- Solution To The Question No. 3: (B) Finding VDocument2 pagesSolution To The Question No. 3: (B) Finding VTuhin Mishuk PaulNo ratings yet
- Exercise 2.6: Solution: Given ThatDocument10 pagesExercise 2.6: Solution: Given ThatSudais AkbarNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- HKISO-2019-2020 Mock Heat SSFDocument10 pagesHKISO-2019-2020 Mock Heat SSFChesky Dominic Minas100% (5)
- Plastic Analysis of StructuresDocument26 pagesPlastic Analysis of Structuresomar sayedNo ratings yet
- Relation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerDocument22 pagesRelation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerBharati patil67% (18)
- RPH ChemDocument3 pagesRPH ChemNur Hidayah IsmailNo ratings yet
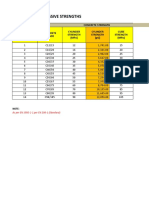
- Concrete Compressive StrengthDocument3 pagesConcrete Compressive StrengthFranklyn P. Genove100% (1)
- The Cosmic Perspective, 7e (Bennett Et Al.) Chapter 1 A Modern View of The UniverseDocument19 pagesThe Cosmic Perspective, 7e (Bennett Et Al.) Chapter 1 A Modern View of The UniverseD.J Cassidy100% (1)
- (Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Document260 pages(Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Ashiq Elahi Design & Application EngineerNo ratings yet
- Double WedgeDocument9 pagesDouble WedgeKarthick MurugesanNo ratings yet
- Last Minute Review MCQDocument34 pagesLast Minute Review MCQIB Experts for 7on7 Pvt. Ltd.No ratings yet
- How To Calculate Eft by Mott-Schottky1Document4 pagesHow To Calculate Eft by Mott-Schottky1José Augusto LucenaNo ratings yet
- L18 Sources IIIDocument19 pagesL18 Sources IIIsvedika18No ratings yet
- Nyquist Plot PDFDocument24 pagesNyquist Plot PDFvidyagbargeNo ratings yet
- Introduction To Heat Exchangers: Types, Classification and AnalysisDocument13 pagesIntroduction To Heat Exchangers: Types, Classification and AnalysisPrinceJohnNo ratings yet
- Young's Double Slit ExperimentDocument3 pagesYoung's Double Slit ExperimentAndrew RattanNo ratings yet
- Calculating and Displaying Fatigue ResultsDocument42 pagesCalculating and Displaying Fatigue ResultsBekirHanNo ratings yet
- Explain Briefly The Evaporation ProcessDocument4 pagesExplain Briefly The Evaporation ProcessChristian GarciaNo ratings yet
- M1pp Jan13Document99 pagesM1pp Jan13JW1212No ratings yet
- Study of Lateral Buckling of Submarine Pipeline: Song Xiaodi, Song XiaoxianDocument4 pagesStudy of Lateral Buckling of Submarine Pipeline: Song Xiaodi, Song XiaoxianKing1971No ratings yet
- Moment Distribution Method: Prof - Kodali SrinivasDocument9 pagesMoment Distribution Method: Prof - Kodali SrinivasprakashNo ratings yet
- Code AsterDocument16 pagesCode AsterStefano MilaniNo ratings yet
- 1983-Vibration Studies and Tests of Liquid Storage TanksDocument28 pages1983-Vibration Studies and Tests of Liquid Storage TanksbehzadNo ratings yet
- Thesis Amin Abrishambaf 2015Document347 pagesThesis Amin Abrishambaf 2015Marcelo CarvalhoNo ratings yet
- Basic Electricity - Refresher Course DavaoDocument55 pagesBasic Electricity - Refresher Course DavaoPrudz100% (1)
- Taller 2Document2 pagesTaller 2marcela galindoNo ratings yet
- Pages From Leak Test Level 2Document63 pagesPages From Leak Test Level 2ManivannanMudhaliarNo ratings yet
- Lab Report NozzleDocument9 pagesLab Report NozzleMuhammad Amir ZarifNo ratings yet
- PRINTED ChemT4HLQDocument18 pagesPRINTED ChemT4HLQtaengooNo ratings yet
- 0.1 Single Time Constant Circuit: No Energy Storage Elements No Independent GeneratorsDocument10 pages0.1 Single Time Constant Circuit: No Energy Storage Elements No Independent GeneratorsSimone MolinaroNo ratings yet
- Midterms q3 q4Document22 pagesMidterms q3 q4JohnNo ratings yet