You might also like
- FORMULA SHEET Structural DynamicsDocument5 pagesFORMULA SHEET Structural Dynamicsgen ridan100% (3)
- Oxidation of o-XyleneDocument19 pagesOxidation of o-XyleneIvan Sanchez100% (2)
- A Primer in Theory ConstructionDocument30 pagesA Primer in Theory ConstructionktendoNo ratings yet
- Chapter 14 Complex IntegrationDocument26 pagesChapter 14 Complex Integrationayewinko143No ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- Formulario CalculoVectorialDocument2 pagesFormulario CalculoVectorialClaymohrNo ratings yet
- Formulario Calculo VerctorialDocument2 pagesFormulario Calculo VerctorialKEILA MERCADO MARTINEZNo ratings yet
- Chapterwise Formula-1Document3 pagesChapterwise Formula-1tunio.bscsf21No ratings yet
- HR and SR from EOSDocument5 pagesHR and SR from EOSanonymoussionNo ratings yet
- 0 de AssignmentDocument10 pages0 de AssignmentAndrei HareNo ratings yet
- Universidad Nacional Autónoma de México: FormularioDocument10 pagesUniversidad Nacional Autónoma de México: FormularioLuis Mauricio Aguilar MunguíaNo ratings yet
- HIGH ORDER SLIP BOUNDARY SOLUTIONS For Two-Dimensional Micro-Hartmann Gas FlowsDocument4 pagesHIGH ORDER SLIP BOUNDARY SOLUTIONS For Two-Dimensional Micro-Hartmann Gas FlowsAhmad AlmasriNo ratings yet
- Degree_Formula_Sheet (1)Document5 pagesDegree_Formula_Sheet (1)Hai Liang OngNo ratings yet
- FormularioDocument1 pageFormularioSophia Malinalli Samperio OlveraNo ratings yet
- Unit 5 (Fourier Series)Document24 pagesUnit 5 (Fourier Series)krushil tejaniNo ratings yet
- MIdterm SolDocument3 pagesMIdterm Sol백승헌No ratings yet
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- Shear Stresses: Mass Conservation Equation in Cartesian CoordinatesDocument2 pagesShear Stresses: Mass Conservation Equation in Cartesian Coordinatesمحمد عمادNo ratings yet
- Complex Numbers SUMMARYDocument16 pagesComplex Numbers SUMMARYslegendmaxNo ratings yet
- Formulario 2Document1 pageFormulario 2Bryaton Chaves CorderoNo ratings yet
- Control of Electromechanical Systems: Prof. Claudio Roberto GazDocument7 pagesControl of Electromechanical Systems: Prof. Claudio Roberto GazSolayman Salindato MasoNo ratings yet
- FORMULASDocument2 pagesFORMULASartuNo ratings yet
- FORMULASDocument2 pagesFORMULASartuNo ratings yet
- FORMULASsDocument2 pagesFORMULASsartuNo ratings yet
- Ejercicios Dinamica AuxiliaturaDocument22 pagesEjercicios Dinamica AuxiliaturaEric cumalyNo ratings yet
- FormulasDocument2 pagesFormulasmkesq07No ratings yet
- Scattering State Solutions To The Delta Function PotentialDocument11 pagesScattering State Solutions To The Delta Function Potentialmustafa alasadyNo ratings yet
- Formulario CálculoDocument2 pagesFormulario CálculoYansi Nahomy Aguilar CruzNo ratings yet
- Review of Previous LecturesDocument7 pagesReview of Previous LecturesSolayman Salindato MasoNo ratings yet
- Resumen de Calculo 1Document1 pageResumen de Calculo 1KATERINENo ratings yet
- Clas 3Document1 pageClas 3CURSOS MENDOZANo ratings yet
- UntitledDocument2 pagesUntitledYulexi Yajaira Pesantes ApoloNo ratings yet
- Review of Differentiation Integration FormulasDocument2 pagesReview of Differentiation Integration FormulasChester GertesNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- Unit-5 Lecture Notes (Mathematics-1) (Fourier Series) 2023-24Document21 pagesUnit-5 Lecture Notes (Mathematics-1) (Fourier Series) 2023-24hnafiul97No ratings yet
- Analytic Functions of Complex VariableDocument18 pagesAnalytic Functions of Complex VariableUthman MohammedNo ratings yet
- Assignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0Document5 pagesAssignment For Machine Design 2018 - 2020 Batch: 1 Sin Cos 0 Sin Cos 0prasobhaNo ratings yet
- Generación de CalorDocument5 pagesGeneración de CalorKJTEJNo ratings yet
- Integral CheatSheet AllDocument5 pagesIntegral CheatSheet AllAmir TNo ratings yet
- Vector Calculus Add OnDocument86 pagesVector Calculus Add Onabiramijeyaseelan05No ratings yet
- Descriptive Memory of Acoustic Oud DesignDocument18 pagesDescriptive Memory of Acoustic Oud DesignDario Martin LobosNo ratings yet
- EEC325 Chapter 1 1 1Document13 pagesEEC325 Chapter 1 1 1Bashir Abubakar AlkasimNo ratings yet
- Complex Numbers BasicsDocument37 pagesComplex Numbers BasicsAshish Dhiwar100% (1)
- Formulario EXTRADocument6 pagesFormulario EXTRALorenzo Frank ZappaNo ratings yet
- Logarithmic Decrement FormulaDocument2 pagesLogarithmic Decrement FormulanakulNo ratings yet
- Formula Sheet - EM1 - EM2Document12 pagesFormula Sheet - EM1 - EM2Ziyang XieNo ratings yet
- Calculating wellbore trajectory and pressure parametersDocument2 pagesCalculating wellbore trajectory and pressure parameterstabarakNo ratings yet
- NCS21 - 03 - Describing Function Analysis - 04Document8 pagesNCS21 - 03 - Describing Function Analysis - 04zain khuramNo ratings yet
- Resonancia Circuitos RLCDocument9 pagesResonancia Circuitos RLCEddyNo ratings yet
- Experiment 3Document12 pagesExperiment 3Sayaf KhanNo ratings yet
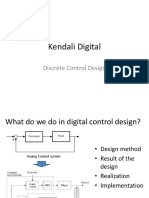
- Kendali Digital-4 - Discrete Control DesignDocument17 pagesKendali Digital-4 - Discrete Control DesignChinta WulandariNo ratings yet
- HW#2 Ee370Document7 pagesHW#2 Ee370Ahmed Al-SarawiNo ratings yet
- Formulario GeneralDocument2 pagesFormulario GeneralMaria LmNo ratings yet
- Calculating Kinds of IntegralsDocument8 pagesCalculating Kinds of IntegralsBún CáNo ratings yet
- MME A-Level-Formula-BookletDocument7 pagesMME A-Level-Formula-BookletAdrian ParkinsonNo ratings yet
- Solving Two-Phase Flow in a Square ChannelDocument4 pagesSolving Two-Phase Flow in a Square Channele_ghadirianNo ratings yet
- Math For FunDocument4 pagesMath For FunFrederick MarsNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Thermodynamics ReviewDocument47 pagesThermodynamics ReviewZain AhmedNo ratings yet
- Thermo lab 1Document2 pagesThermo lab 1Zain AhmedNo ratings yet
- Resistive Equivresistance Ex3-Description TranscriptDocument1 pageResistive Equivresistance Ex3-Description TranscriptZain AhmedNo ratings yet
- Ceramic OcwDocument30 pagesCeramic OcwZain AhmedNo ratings yet
- Sample LettersDocument4 pagesSample LettersZain AhmedNo ratings yet
- Course Outline Communication Skills OBE LatestDocument17 pagesCourse Outline Communication Skills OBE LatestZain AhmedNo ratings yet
- Science ProjectDocument15 pagesScience ProjectZain AhmedNo ratings yet
- EE-Lab 8Document10 pagesEE-Lab 8Zain AhmedNo ratings yet
- Optimal Operation of A Plug-In Hybrid Vehicle With Battery Thermal and Degradation ModelDocument8 pagesOptimal Operation of A Plug-In Hybrid Vehicle With Battery Thermal and Degradation ModelZain AhmedNo ratings yet
- Minimum Spanning Tree AlgorithmsDocument2 pagesMinimum Spanning Tree Algorithmsikx00No ratings yet
- Trees (Detailed)Document54 pagesTrees (Detailed)SZ HassanNo ratings yet
- How To Get Into FAANGDocument26 pagesHow To Get Into FAANGsasa33213867% (3)
- Unit 2. Network TopologyDocument7 pagesUnit 2. Network TopologySam AndersonNo ratings yet
- GraphDocument40 pagesGraphAvinash KumarNo ratings yet
- Time Analysis of Linear & Binary Search AlgorithmsDocument12 pagesTime Analysis of Linear & Binary Search AlgorithmsArun Raj G GNo ratings yet
- Data StructuresDocument3 pagesData StructuresHarshitNo ratings yet
- Worksheet 9.5 Hyperbolas: Identify The Vertices and Foci of Each. Then Sketch The GraphDocument2 pagesWorksheet 9.5 Hyperbolas: Identify The Vertices and Foci of Each. Then Sketch The GraphpooNo ratings yet
- CV for Vivek Dhand, MathematicianDocument3 pagesCV for Vivek Dhand, MathematicianCesarNo ratings yet
- Exercise of Transenden FunctionDocument4 pagesExercise of Transenden FunctionNazifka RizqyNo ratings yet
- Complex NumbersDocument76 pagesComplex NumbersMark SyNo ratings yet
- Generating FunctionsDocument38 pagesGenerating FunctionscomputerstudentNo ratings yet
- Subgraphs Depth-First SearchDocument4 pagesSubgraphs Depth-First Searchnautilus_261No ratings yet
- Regular and Irregular Progressive Edge-GrowthDocument13 pagesRegular and Irregular Progressive Edge-Growthchaudhryadnanaslam3799No ratings yet
- Graph Theory Exam QuestionsDocument4 pagesGraph Theory Exam QuestionsKapilaNo ratings yet
- Chapter 9Document3 pagesChapter 9Nguyễn Minh HoàngNo ratings yet
- Trigonometric Ratios of Given AnglesDocument56 pagesTrigonometric Ratios of Given AnglesRizky MaulanaNo ratings yet
- Trigonometry (HLP)Document3 pagesTrigonometry (HLP)Heath LedgerNo ratings yet
- School Based Assessment 2022 GRADE 4 (Section-A) MATHEMATICS PART - B (Subjective Type)Document6 pagesSchool Based Assessment 2022 GRADE 4 (Section-A) MATHEMATICS PART - B (Subjective Type)Muhammad ImranNo ratings yet
- Cambridge Books OnlineDocument3 pagesCambridge Books Onlinemaitham100No ratings yet
- Untitled PDFDocument87 pagesUntitled PDFasadNo ratings yet
- Sample Paper: Sof International Mathematics OlympiadDocument2 pagesSample Paper: Sof International Mathematics OlympiadJuna ManroeNo ratings yet
- Hamiltonian Paths in K-Alphabet Grid GraphsDocument5 pagesHamiltonian Paths in K-Alphabet Grid GraphsJournal of ComputingNo ratings yet
- A Minimal Spanning Tree Algorithm For Distribution Networks ConfigurationDocument7 pagesA Minimal Spanning Tree Algorithm For Distribution Networks ConfigurationpanggahNo ratings yet
- On The Fault-Tolerant Metric Dimension of Convex PolytopesDocument14 pagesOn The Fault-Tolerant Metric Dimension of Convex PolytopesUsman KheraNo ratings yet
- Problem Formulation: Lecture 2 of Artificial IntelligenceDocument26 pagesProblem Formulation: Lecture 2 of Artificial IntelligencePhan Thanh ThắngNo ratings yet
- All CoursesDocument12 pagesAll CoursesAbdullah YusufNo ratings yet
- Graph Theory: Maximum Flows and Min Cost FlowsDocument13 pagesGraph Theory: Maximum Flows and Min Cost FlowshenkjohanjorisdexNo ratings yet
- Introduction to Discrete Mathematics GraphsDocument20 pagesIntroduction to Discrete Mathematics GraphsAnil KumarNo ratings yet