You might also like
- Essential PTC® Mathcad Prime® 3.0: A Guide for New and Current UsersFrom EverandEssential PTC® Mathcad Prime® 3.0: A Guide for New and Current UsersRating: 4 out of 5 stars4/5 (12)
- Tid 0000209 01 PDFDocument5 pagesTid 0000209 01 PDFjoaojitoNo ratings yet
- E3sconf Eece18 10006Document5 pagesE3sconf Eece18 10006Sudarsan Kumar VenkatesanNo ratings yet
- Millipak 4Qpm Controller Manual: For System Version V1.01Document72 pagesMillipak 4Qpm Controller Manual: For System Version V1.01BortomaqNo ratings yet
- Control 2Document1 pageControl 2nerico900No ratings yet
- Model DDM Plus Htu-C High Bit-Rate Digital Subscriber Line Transceiver Unit - Central Office Installation/MaintenanceDocument18 pagesModel DDM Plus Htu-C High Bit-Rate Digital Subscriber Line Transceiver Unit - Central Office Installation/MaintenanceKendric ShahidNo ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument14 pagesSpeed Control of DC Motor by Using PWM TechniquePrincy Merin JoseNo ratings yet
- Example of Connection To Machine Controller MP2¡¡¡Document8 pagesExample of Connection To Machine Controller MP2¡¡¡Đạt Trương TuấnNo ratings yet
- A Fast Methodology For Solving The Power Flow in Hybrid Ac/dc Networks: The European North Sea Supergrid Case StudyDocument3 pagesA Fast Methodology For Solving The Power Flow in Hybrid Ac/dc Networks: The European North Sea Supergrid Case StudyChristian Alejandro Leon RamirezNo ratings yet
- CIGRE 2018: 21, Rue D'artois, F-75008 PARISDocument11 pagesCIGRE 2018: 21, Rue D'artois, F-75008 PARISVenkatasubramanian IyerNo ratings yet
- ENEA Brasimone PlantDocument27 pagesENEA Brasimone PlantAnkit GandhiNo ratings yet
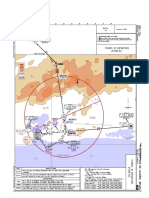
- NDB Rwy 23L: 12102 744 233° 376 Rickenbacker Intl 740Document1 pageNDB Rwy 23L: 12102 744 233° 376 Rickenbacker Intl 740Felipe GarciaNo ratings yet
- Solar Cell I-V Cuk ConverterDocument1 pageSolar Cell I-V Cuk ConverterKORAKRIT ANANTA-AUOYPORNNo ratings yet
- KhjjytrrDocument1 pageKhjjytrrncirNo ratings yet
- MS-16811 Rev0bDocument43 pagesMS-16811 Rev0bJonathan BiondiNo ratings yet
- Digital Filter Design Using Spreadsheets: Karim Y. Kabalan, Ali El-HajjDocument7 pagesDigital Filter Design Using Spreadsheets: Karim Y. Kabalan, Ali El-Hajjman_93No ratings yet
- Tidu 466Document8 pagesTidu 466KINGS entertainment KHANNo ratings yet
- FB5204B3Document4 pagesFB5204B3Renato RodriguesNo ratings yet
- FCM - Rev-E 7Document3 pagesFCM - Rev-E 7quoc dat NguyenNo ratings yet
- Scale BatchDocument6 pagesScale BatchMarie GalvãoNo ratings yet
- Flowmaster v7.0 Easy GuideDocument109 pagesFlowmaster v7.0 Easy Guidepinenamu100% (1)
- A Simple Current Ripple Reduction Method For B4 Inverters: Dong-Myung Lee, Jae-Bum Park and Hamid A. ToliyatDocument8 pagesA Simple Current Ripple Reduction Method For B4 Inverters: Dong-Myung Lee, Jae-Bum Park and Hamid A. ToliyatMelek UzunlarNo ratings yet
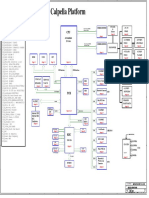
- Acer Aspire E1-510 - Compal La-A621p (Z5we3. Z5WT3)Document38 pagesAcer Aspire E1-510 - Compal La-A621p (Z5we3. Z5WT3)Ivanée CarelliNo ratings yet
- Mudka: (PUMS1D) Pumso 1D DepartureDocument1 pageMudka: (PUMS1D) Pumso 1D Departurexplane simuladorNo ratings yet
- Automatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Document6 pagesAutomatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Tadeo Benegusenga100% (1)
- 7.4 Loop Diagram: C L F: B A C PDocument21 pages7.4 Loop Diagram: C L F: B A C PnmulyonoNo ratings yet
- CT Sizing CalculationDocument6 pagesCT Sizing CalculationrajeshNo ratings yet
- MS-16811 Rev2.0Document45 pagesMS-16811 Rev2.0Jonathan BiondiNo ratings yet
- Osamu2 CR HPC KBC DatasheetDocument1 pageOsamu2 CR HPC KBC DatasheetElzet 1723No ratings yet
- Topic Page NoDocument49 pagesTopic Page NoUjwal JaiswalNo ratings yet
- EMM3502 - LAB MANUAL (Flow, Level and Pressure) PDFDocument7 pagesEMM3502 - LAB MANUAL (Flow, Level and Pressure) PDFPuti FikriNo ratings yet
- Dustbin Using GSMDocument9 pagesDustbin Using GSMSRITECH SOLUTIONSNo ratings yet
- It8518e/hx It8518e/hx: LPC LPCDocument1 pageIt8518e/hx It8518e/hx: LPC LPCRamón GaleanoNo ratings yet
- Design and Comparison of Explicit Model PredictiveDocument9 pagesDesign and Comparison of Explicit Model PredictiveCesar VillamizarNo ratings yet
- Tid 0000049 01 PDFDocument4 pagesTid 0000049 01 PDFjoaojitoNo ratings yet
- Turbocharger-Advance Natural Gas PDFDocument2 pagesTurbocharger-Advance Natural Gas PDFzona amrullohNo ratings yet
- Scala 14L PDFDocument1 pageScala 14L PDFkuvalda2000100% (1)
- Msi ms-1681 cr620 SCH PDFDocument45 pagesMsi ms-1681 cr620 SCH PDFkamil_yilmaz_6No ratings yet
- Simulation of Three Level Inverter Using Sinusoidal Pulse Width Modulation Technique by MatlabDocument5 pagesSimulation of Three Level Inverter Using Sinusoidal Pulse Width Modulation Technique by MatlabANKIT PRAJAPATINo ratings yet
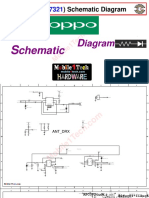
- A5s (CPH1909)Document23 pagesA5s (CPH1909)Ayman EbrahemNo ratings yet
- Line Resonance Experienced in 400kV and 225kV Sub-Network Is De-EnergizedDocument7 pagesLine Resonance Experienced in 400kV and 225kV Sub-Network Is De-EnergizedarunmozhiNo ratings yet
- 1000w-2-Ohms-63vdc-Supply-Audio-Power-Amp - Vdbl-1000-Ls2-2013-Rev-1 H HIMAWAN TEJO LAKSONODocument3 pages1000w-2-Ohms-63vdc-Supply-Audio-Power-Amp - Vdbl-1000-Ls2-2013-Rev-1 H HIMAWAN TEJO LAKSONOKajal BaraiyaNo ratings yet
- NCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Document2 pagesNCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Maria Perez100% (1)
- Wireless Based Transformer Fault Location Analysis in Distribution SystemDocument25 pagesWireless Based Transformer Fault Location Analysis in Distribution SystemSrini VasanNo ratings yet
- A Comparison of Isolated DC-DC Converters For Microinverter ApplicationsDocument8 pagesA Comparison of Isolated DC-DC Converters For Microinverter Applicationsgrasia77No ratings yet
- User Manual - EE-610Document1 pageUser Manual - EE-610google100% (1)
- 203 Znja072 05 (Ni-85990)Document13 pages203 Znja072 05 (Ni-85990)atifNo ratings yet
- Notifier FMM 1 Monitor ModuleDocument2 pagesNotifier FMM 1 Monitor Modulejames alfarasNo ratings yet
- Notifier FMM 1 Monitor ModuleDocument2 pagesNotifier FMM 1 Monitor ModuleKhaled KadryNo ratings yet
- Motor: 220-250VDC/AC Diagram: 0889461H: ScaleDocument28 pagesMotor: 220-250VDC/AC Diagram: 0889461H: ScaleMiuta IrinelNo ratings yet
- Skyware Type123,960 8000842-01Document8 pagesSkyware Type123,960 8000842-01Tuvia LeNo ratings yet
- Op IFDocument12 pagesOp IFdesignNo ratings yet
- B.tech Jntua R15Document159 pagesB.tech Jntua R15Sai TejaNo ratings yet
- WWB Intro NotesDocument3 pagesWWB Intro NotesHouseman74No ratings yet
- Esquematico PruebaDocument1 pageEsquematico PruebaSergio MoraNo ratings yet
- Future: Want Program Programmer That Programmer Unit's of inDocument9 pagesFuture: Want Program Programmer That Programmer Unit's of indinotronNo ratings yet
- 8051 MicrocontrollerDocument19 pages8051 MicrocontrollerPrasath Rajendran100% (1)
- BAI 3 - Sensor - ADC - UARTDocument9 pagesBAI 3 - Sensor - ADC - UARTTrần Ngọc Thiên DiNo ratings yet
- IT8887Document1 pageIT8887Julian Andres RozoNo ratings yet
- Natural Hazards & Disaster Management 44Document51 pagesNatural Hazards & Disaster Management 44Lohith GsNo ratings yet
- Economy For InterviewDocument54 pagesEconomy For InterviewprinceNo ratings yet
- Food Processing 1Document6 pagesFood Processing 1princeNo ratings yet
- Civil Service Reforms Not NitiDocument13 pagesCivil Service Reforms Not NitiprinceNo ratings yet
- Pds Revamping and IssuesDocument4 pagesPds Revamping and IssuesprinceNo ratings yet
- Vision VAMDocument64 pagesVision VAMgood buddyNo ratings yet
- LogisticcsDocument2 pagesLogisticcsprinceNo ratings yet
- Cough Syrup DeathsDocument1 pageCough Syrup DeathsprinceNo ratings yet
- Cultural Developments in Medieval India: Module - 2Document25 pagesCultural Developments in Medieval India: Module - 2shubham sharmaNo ratings yet
- Civil Service ReformsDocument4 pagesCivil Service ReformsprinceNo ratings yet
- RTI 3rd ReportDocument108 pagesRTI 3rd ReportAniruddha MondalNo ratings yet
- Initial Valued Problems IitkDocument30 pagesInitial Valued Problems IitkprinceNo ratings yet
- Nutrition: Important StatisticsDocument3 pagesNutrition: Important StatisticsprinceNo ratings yet
- 4e3fc Government Schemes in NewsDocument109 pages4e3fc Government Schemes in NewsabcNo ratings yet
- Vision 2021 World HistoryDocument86 pagesVision 2021 World HistoryBraj KishorNo ratings yet
- Minerals and Industrial LocationDocument29 pagesMinerals and Industrial LocationDarshan KanganeNo ratings yet
- Francis Turbine Manual PDFDocument6 pagesFrancis Turbine Manual PDFprinceNo ratings yet
- Road Power Generator PDFDocument6 pagesRoad Power Generator PDFYau Wen JaeNo ratings yet
- Brava Is ChangeDocument2 pagesBrava Is ChangeprinceNo ratings yet
- 12 PDFDocument1 page12 PDFprinceNo ratings yet
- GeographyDocument83 pagesGeographyAshishNo ratings yet
- ME685A: Applied Numerical Methods Homework Assignment #1 Maximum Marks: 20Document1 pageME685A: Applied Numerical Methods Homework Assignment #1 Maximum Marks: 20princeNo ratings yet
- Speed Breaker Power Generator PDFDocument7 pagesSpeed Breaker Power Generator PDFYashodhan IngoleNo ratings yet
- IME 672-Chapter 1 PDFDocument41 pagesIME 672-Chapter 1 PDFprinceNo ratings yet
- ME685A: Applied Numerical Methods Homework Assignment #1 Maximum Marks: 20Document1 pageME685A: Applied Numerical Methods Homework Assignment #1 Maximum Marks: 20princeNo ratings yet
- IME 672-Chapter 1 PDFDocument41 pagesIME 672-Chapter 1 PDFprinceNo ratings yet
- Francis Turbine Laboratory ManualDocument6 pagesFrancis Turbine Laboratory ManualprinceNo ratings yet
- 1 PDFDocument1 page1 PDFprinceNo ratings yet
- C Space CodeDocument1 pageC Space CodeprinceNo ratings yet
- EEE 209 Presentation 1 IntroductionDocument8 pagesEEE 209 Presentation 1 IntroductionMert YılmazNo ratings yet
- DeformationDocument4 pagesDeformationLesterNo ratings yet
- Single-Phase Motors - Troubleshooting FlukeDocument4 pagesSingle-Phase Motors - Troubleshooting FlukeTo Duc Hung100% (1)
- Full Type Test Report - SiemensDocument250 pagesFull Type Test Report - SiemensmustafaNo ratings yet
- Earthing and Short-Circuiting DevicesDocument43 pagesEarthing and Short-Circuiting DevicesMinh VienNo ratings yet
- Atox MillDocument8 pagesAtox MillJoko DewotoNo ratings yet
- Air-Cored Axial FluxDocument5 pagesAir-Cored Axial FluxOWAIS HAMEEDNo ratings yet
- Hitachi Common ModeDocument32 pagesHitachi Common Modegiuseppe_ferrandoNo ratings yet
- EIM 11 - Q1 - W8 - Mod8Document30 pagesEIM 11 - Q1 - W8 - Mod8aldrin joseph100% (3)
- Power Electronics Course OutlineDocument4 pagesPower Electronics Course OutlineAL Rizwan AsifNo ratings yet
- An1914 PDFDocument56 pagesAn1914 PDFUpama Das100% (1)
- SMC-3 Specs PDFDocument3 pagesSMC-3 Specs PDFManuelNo ratings yet
- Force Physics (F Ma)Document3 pagesForce Physics (F Ma)Golden TrioNo ratings yet
- Data Communication & Computer Networks (DCCN) IT-360: Transmission Medium IDocument12 pagesData Communication & Computer Networks (DCCN) IT-360: Transmission Medium IAbdullah RamayNo ratings yet
- Contoh SoalDocument24 pagesContoh SoalNovia RezaNo ratings yet
- Photovoltaic Synchronous Generator - Architecture and Control Strategy For A Grid - Forming PV Energy System PDFDocument12 pagesPhotovoltaic Synchronous Generator - Architecture and Control Strategy For A Grid - Forming PV Energy System PDFsandip mishraNo ratings yet
- Lec 1 - Vectors, Operation On Vectors, Component MethodDocument16 pagesLec 1 - Vectors, Operation On Vectors, Component MethodColeen AmadoNo ratings yet
- Comparing The Darcy Weisbach Equation With The Manning EquationDocument4 pagesComparing The Darcy Weisbach Equation With The Manning Equationvinkumar_hbtiNo ratings yet
- VLF Surveying and DataDocument4 pagesVLF Surveying and Datavelkus2013No ratings yet
- AsDocument158 pagesAsMohammed Umar Farooq PatelNo ratings yet
- Ial Maths Mech 1 RE1 PDFDocument16 pagesIal Maths Mech 1 RE1 PDFWandaNo ratings yet
- Kinematics Class 11 Physics - NotesDocument20 pagesKinematics Class 11 Physics - NotesStudy ShresthaNo ratings yet
- 630 Volt and 400 Volt FILM Capacitors Electrolytic & Safety Capacitors MICA and 1000V, 1600V & 6000VDocument8 pages630 Volt and 400 Volt FILM Capacitors Electrolytic & Safety Capacitors MICA and 1000V, 1600V & 6000VwilfredoinimNo ratings yet
- Load Torque - Components, Nature and ClassificationDocument6 pagesLoad Torque - Components, Nature and Classificationmanavh857No ratings yet
- Gravity Is More Than A NameDocument45 pagesGravity Is More Than A Namepk2varmaNo ratings yet
- Power Electronics Question Paper Part5Document2 pagesPower Electronics Question Paper Part5vagoliyoNo ratings yet
- MCB600 :: ROAL Living EnergyDocument10 pagesMCB600 :: ROAL Living EnergyroalscribdNo ratings yet
- RenewableEnergy PDFDocument28 pagesRenewableEnergy PDFZahoor AbbasNo ratings yet
- Efecto Fotoeléctrico PDFDocument2 pagesEfecto Fotoeléctrico PDFRaúlChamorroTobarNo ratings yet
- PotM 2019 11 Double Circuit LineDocument9 pagesPotM 2019 11 Double Circuit Linegulatimanish1985No ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)