You might also like
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 pagesWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojNo ratings yet
- UET Peshawar Jalozai Campus Students Develop Quadcopter Using ArduinoDocument18 pagesUET Peshawar Jalozai Campus Students Develop Quadcopter Using ArduinoAdnan AhmadNo ratings yet
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocument10 pagesDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamNo ratings yet
- DRONE PPT TTTTTTTTDocument15 pagesDRONE PPT TTTTTTTTPragatiNo ratings yet
- "A Quadcopter Using K.K.2.1.5 Flight Controller".: A Project Presentation OnDocument17 pages"A Quadcopter Using K.K.2.1.5 Flight Controller".: A Project Presentation OnAkshay SinghalNo ratings yet
- Quad CopterDocument42 pagesQuad CopterShanaka JayasekaraNo ratings yet
- Development of Isr For QuadcopterDocument9 pagesDevelopment of Isr For QuadcopterInternational Journal of Research in Engineering and TechnologyNo ratings yet
- HovercraftDocument6 pagesHovercraftSibasish SahuNo ratings yet
- Buat Camera Thermal DGN ArduinoDocument4 pagesBuat Camera Thermal DGN ArduinoelkaNo ratings yet
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocument15 pagesA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinNo ratings yet
- TwincopterDocument5 pagesTwincopterRinson RajNo ratings yet
- Advanced View Arduino Projects List - Use Arduino For Projects-4Document61 pagesAdvanced View Arduino Projects List - Use Arduino For Projects-4Bilal AfzalNo ratings yet
- Quadcopters PresentationDocument20 pagesQuadcopters PresentationManikVermaNo ratings yet
- A Thesis On QuadcopterDocument85 pagesA Thesis On Quadcopterasraa mahdiNo ratings yet
- DRONES UpdatedDocument13 pagesDRONES UpdatedAkarshit PachyalaNo ratings yet
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- VTOL Modeling (Student)Document5 pagesVTOL Modeling (Student)juanNo ratings yet
- Quadcopter Design DocumentDocument23 pagesQuadcopter Design Documentapi-556772195No ratings yet
- Brock Technologies Antenna Pointing System V2 BrochureDocument1 pageBrock Technologies Antenna Pointing System V2 BrochureUAVs AustraliaNo ratings yet
- Obstacles Detection2Document10 pagesObstacles Detection2Rahul SawantNo ratings yet
- ME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter DronesDocument7 pagesME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter Dronesliuxc000No ratings yet
- Hybrid PID LQ Quadrotor ControllerDocument14 pagesHybrid PID LQ Quadrotor ControllerGhada BeydounNo ratings yet
- How To Use OV7670 Camera Module With ArduinoDocument6 pagesHow To Use OV7670 Camera Module With ArduinoNoval AkbarNo ratings yet
- SystemVision Intro TrainingDocument205 pagesSystemVision Intro TrainingRafael SouzaNo ratings yet
- Motor of VTOL Aircraft PDFDocument22 pagesMotor of VTOL Aircraft PDFvimarsh joshiNo ratings yet
- DRS Pixhawk 2 17th March 2016Document29 pagesDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaNo ratings yet
- Quadcopter 140410021020 Phpapp02Document20 pagesQuadcopter 140410021020 Phpapp02Pooja BanNo ratings yet
- Design and Manufacturing of a QuadcopterDocument6 pagesDesign and Manufacturing of a QuadcopterashokkumarNo ratings yet
- VHDL test bench for digital image processing using new hex-image formatDocument10 pagesVHDL test bench for digital image processing using new hex-image formatMoazh TawabNo ratings yet
- Atmel Studio Integrated Development Environment With FreeRTOS AwarenessDocument8 pagesAtmel Studio Integrated Development Environment With FreeRTOS AwarenessAshok ObuliNo ratings yet
- FPV Cameras For DronesDocument5 pagesFPV Cameras For Dronesnapoleon_velasc3617100% (1)
- Drone Project: Physics 118 - Final ReportDocument13 pagesDrone Project: Physics 118 - Final ReportMahdi MiriNo ratings yet
- RobotDocument132 pagesRobotPhong Ngo100% (1)
- Literature Review VtolDocument14 pagesLiterature Review VtolFahadZamanMalikNo ratings yet
- 6-DOF Installation Instructions: Package ListDocument15 pages6-DOF Installation Instructions: Package ListJosé Javier Pérez BlancoNo ratings yet
- Military Applications of Autonomous SystemsDocument30 pagesMilitary Applications of Autonomous SystemsElena JelerNo ratings yet
- Simulating Quadrotor UAVs in Outdoor ScenariosDocument7 pagesSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaNo ratings yet
- Quad Copter PresentationDocument19 pagesQuad Copter Presentationjunaid 786No ratings yet
- Mikado LOGO 600SE ManualDocument13 pagesMikado LOGO 600SE Manualr521999No ratings yet
- Supporting The Development of Unmanned Vehicles MAVlink Protocol and Its Security AspectsDocument40 pagesSupporting The Development of Unmanned Vehicles MAVlink Protocol and Its Security AspectsMarcosSantanadeOliveiraNo ratings yet
- Final Report OMNI WING AIRCRAFTDocument51 pagesFinal Report OMNI WING AIRCRAFTPrithvi AdhikaryNo ratings yet
- Spherical VTOL UAV Summer Project DesignDocument11 pagesSpherical VTOL UAV Summer Project DesignPranab PrustyNo ratings yet
- Drone PresentationDocument9 pagesDrone PresentationAkarshit PachyalaNo ratings yet
- Cetus X FPV Kit - Quick Start Guide (Betaflight Version)Document8 pagesCetus X FPV Kit - Quick Start Guide (Betaflight Version)tiger74.lieNo ratings yet
- Distributed consensus algorithm for swarming UAV inspectionDocument23 pagesDistributed consensus algorithm for swarming UAV inspectionbegziew getnetNo ratings yet
- 12.4 Unmanned Aerial VehicleDocument18 pages12.4 Unmanned Aerial VehicleJose Luis FloresNo ratings yet
- Unmanned Aerial VehicleDocument178 pagesUnmanned Aerial Vehicletanveershariff13No ratings yet
- An Adaptive Controller For Flapping Wing Aircraft - Balaji Kartikeyan ChandrasekaranDocument31 pagesAn Adaptive Controller For Flapping Wing Aircraft - Balaji Kartikeyan ChandrasekaranBalaji KartikNo ratings yet
- ART HOBBY Gliders for Special Orders GuideDocument16 pagesART HOBBY Gliders for Special Orders GuidePhilomin VeraNo ratings yet
- Mobile Controlled Robotic Arm Using Arduino & Hc-05Document16 pagesMobile Controlled Robotic Arm Using Arduino & Hc-05anugya sharmaNo ratings yet
- UavDocument31 pagesUavANSHUMANNo ratings yet
- 054-Micro Aerial Vehicles Design Challenges State of The Art ReviewDocument17 pages054-Micro Aerial Vehicles Design Challenges State of The Art Reviewkrishnamoorthy_krishNo ratings yet
- Adafruit Motor Shield v2 For ArduinoDocument47 pagesAdafruit Motor Shield v2 For ArduinoBrandon EricksonNo ratings yet
- Face Recognition On UAV AI DroneDocument6 pagesFace Recognition On UAV AI DroneInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Modelling & Control of A QuadrotorDocument15 pagesModelling & Control of A Quadrotorvidc87No ratings yet
- One: Introduction and FeaturesDocument59 pagesOne: Introduction and Featurestharun100% (2)
- Uav 01 PDFDocument62 pagesUav 01 PDFSahil GargNo ratings yet
- Drone PresentationDocument9 pagesDrone PresentationRaviyanshuNo ratings yet
- Optimal Charging Using Universal Voltage ProtocolDocument8 pagesOptimal Charging Using Universal Voltage Protocolmahesh giteNo ratings yet
- Fast Charging To Partial StateDocument9 pagesFast Charging To Partial Statemahesh giteNo ratings yet
- Charging Protocols For Lithium-Ion Batteries and Their Impact On Cycle Life-An Experimental Study With Different 18650 High-Power CellsDocument17 pagesCharging Protocols For Lithium-Ion Batteries and Their Impact On Cycle Life-An Experimental Study With Different 18650 High-Power Cellsmahesh giteNo ratings yet
- A G2V V2G Off Board Fast Charger For Charging of Lithium Ion Based Electric VehiclesDocument6 pagesA G2V V2G Off Board Fast Charger For Charging of Lithium Ion Based Electric Vehiclesmahesh giteNo ratings yet
- Power Electronics Essentials and ApplicationsDocument948 pagesPower Electronics Essentials and ApplicationsFernando Antonio Almeida Macedo100% (11)
- A4963 Datasheet PDFDocument42 pagesA4963 Datasheet PDFmahesh giteNo ratings yet
- Charging Protocols For Lithium-Ion Batteries and Their Impact On Cycle Life-An Experimental Study With Different 18650 High-Power CellsDocument17 pagesCharging Protocols For Lithium-Ion Batteries and Their Impact On Cycle Life-An Experimental Study With Different 18650 High-Power Cellsmahesh giteNo ratings yet
- ComplexDocument3 pagesComplexmahesh giteNo ratings yet
- A Guide to Chemical Classification of Common Volcanic RocksDocument26 pagesA Guide to Chemical Classification of Common Volcanic RocksPepeeJh VaargasNo ratings yet
- #5class-8 (Cordova) Chapter-6 SCIENCE Coal and PetroleumDocument2 pages#5class-8 (Cordova) Chapter-6 SCIENCE Coal and PetroleumVivek PatidarNo ratings yet
- Ensemble Marin OscillantDocument4 pagesEnsemble Marin OscillantRobson CarlosNo ratings yet
- Basics For BJJ SC - V3Document20 pagesBasics For BJJ SC - V3Teo Tolo100% (2)
- Discount Rate - Environmental EconomicsDocument6 pagesDiscount Rate - Environmental EconomicsRoberta DGNo ratings yet
- KGP HG-3Document2 pagesKGP HG-3Lau VillarrealNo ratings yet
- Pelton WheelDocument5 pagesPelton WheelMuhammedShafiNo ratings yet
- Experiment 91 Consumer ChemistryDocument8 pagesExperiment 91 Consumer ChemistryDascaliuc DanielNo ratings yet
- Vernacular ArchitectureDocument16 pagesVernacular ArchitectureHasita KrovvidiNo ratings yet
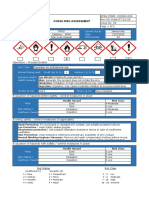
- Cossh Risk Assessment: Carried Out By: Department: Date: Substance Name: CRA NumberDocument4 pagesCossh Risk Assessment: Carried Out By: Department: Date: Substance Name: CRA NumberRocky BisNo ratings yet
- Despiece Motor Briggs 14hp 400707122102Document58 pagesDespiece Motor Briggs 14hp 400707122102leinadNo ratings yet
- Master Drive 6RA70 Parameter ListDocument186 pagesMaster Drive 6RA70 Parameter Listsanjaya srivastava100% (3)
- Class Guide - Soldier Wheelman PDFDocument105 pagesClass Guide - Soldier Wheelman PDFRalph VasquezNo ratings yet
- Zoom Basic Functions - FinalDocument31 pagesZoom Basic Functions - FinalWenshy LavadorNo ratings yet
- Industrial Pollution Crisis in GujaratDocument2 pagesIndustrial Pollution Crisis in GujaratsmagrurakNo ratings yet
- Epidemiology and Etiology of Peptic Ulcer DiseaseDocument5 pagesEpidemiology and Etiology of Peptic Ulcer DiseaseDeepali Mahajan ChaudhariNo ratings yet
- 3d Printing Thesis StatementDocument5 pages3d Printing Thesis Statementoabfziiig100% (2)
- Brand Project-Swapnil WaichaleDocument31 pagesBrand Project-Swapnil WaichaleSwapnil WaichaleNo ratings yet
- Synthesis of Novel Benzimidazole Clubbed Pyrazole Heterocycles Derivatives As Potentially AntibacterialDocument7 pagesSynthesis of Novel Benzimidazole Clubbed Pyrazole Heterocycles Derivatives As Potentially AntibacterialAgung RahmadaniNo ratings yet
- 5S Office OrganizationDocument14 pages5S Office Organizationthuy linh phamNo ratings yet
- The Transition to Computer-Based FE Exams for Chemical EngineersDocument21 pagesThe Transition to Computer-Based FE Exams for Chemical EngineersNNo ratings yet
- Gmat Clinic Course Notes PDFDocument213 pagesGmat Clinic Course Notes PDFDavid ThompsonNo ratings yet
- Mobile C Arm PortfolioDocument6 pagesMobile C Arm PortfolioAri ReviantoNo ratings yet
- Reflective EssayDocument5 pagesReflective Essaybwood17No ratings yet
- Digimerge DPV34DPC Data SheetDocument2 pagesDigimerge DPV34DPC Data SheetJMAC SupplyNo ratings yet
- LP Series: Airless Paint SprayerDocument31 pagesLP Series: Airless Paint SprayerFrancisco Jose Domenech SalaNo ratings yet
- Industrial Coupling and HoseDocument57 pagesIndustrial Coupling and HoseCesar CoronelNo ratings yet
- ME 251 Lecture 1Document20 pagesME 251 Lecture 1Seth AnkamahNo ratings yet
- Rear Axle ShaftsDocument4 pagesRear Axle ShaftsMaria AparecidaNo ratings yet
- IBPhysics Particle Practice KeyDocument2 pagesIBPhysics Particle Practice KeyOnur YavuzcetinNo ratings yet