You might also like
- V5750maintance ManualDocument114 pagesV5750maintance ManualJoe Gozinia100% (2)
- ZX 75Document192 pagesZX 75vanhoackdNo ratings yet
- Combined Overcurrent and Earth-fault Relay GuideDocument12 pagesCombined Overcurrent and Earth-fault Relay GuideNesarkiran BagadeNo ratings yet
- Machine Tool StructuresDocument10 pagesMachine Tool StructuresLowry GuettaNo ratings yet
- NC CNC Machine ToolDocument50 pagesNC CNC Machine ToolShoaib MultaniNo ratings yet
- Aluminum Die Casting Process FlowDocument13 pagesAluminum Die Casting Process FlowPrabish KumarNo ratings yet
- Spline BroachingDocument28 pagesSpline BroachingFaraz IshaniNo ratings yet
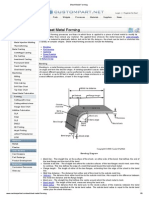
- Sheet Metal Forming PDFDocument9 pagesSheet Metal Forming PDFRakhesh Manchi100% (1)
- Selection of Presses and Its SettingDocument21 pagesSelection of Presses and Its SettingVipul MetaNo ratings yet
- Design of Crush Height For Reliable Press Fit of High Performance BearingsDocument9 pagesDesign of Crush Height For Reliable Press Fit of High Performance Bearingsstefan.vince536No ratings yet
- Machine Tool Guideway DesignDocument76 pagesMachine Tool Guideway DesignSrinivas MurthyNo ratings yet
- Determining Punch Problems: What The Slug Can Tell YouDocument4 pagesDetermining Punch Problems: What The Slug Can Tell YouAl Engg100% (1)
- Paper Rotor DynamicsDocument12 pagesPaper Rotor DynamicsTony HeNo ratings yet
- Paint Inspection:: Daily Coating Inspection ReportDocument1 pagePaint Inspection:: Daily Coating Inspection ReportEhsan KhanNo ratings yet
- Complete Engineering Review & Training Center Certc: MATH 01 /page 1 of 1Document9 pagesComplete Engineering Review & Training Center Certc: MATH 01 /page 1 of 1Arnel Pamaos Lopiba Montañez100% (1)
- SHEETMETAL DESIGNDocument9 pagesSHEETMETAL DESIGNHimanshu SagarNo ratings yet
- Thermal Power Plant Turbo-Generator Foundation DesignDocument19 pagesThermal Power Plant Turbo-Generator Foundation DesigncardreadreNo ratings yet
- Metal Forming ProcessesDocument91 pagesMetal Forming ProcessesMalik IrfanNo ratings yet
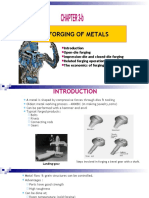
- 3b-Metal FORGINGDocument16 pages3b-Metal FORGINGIzzat Ikram100% (1)
- En 10132 - 2000Document18 pagesEn 10132 - 2000Дмитрий ОсинцевNo ratings yet
- Press BrakesDocument19 pagesPress Brakeszivkovic brankoNo ratings yet
- Sheet Metal BendingDocument30 pagesSheet Metal BendingZen P MonachanNo ratings yet
- Optimization of Surface Roughness Material Removal Rate and Cutting Tool Flank Wear in Turning Using Extended Taguchi Approach 3Document127 pagesOptimization of Surface Roughness Material Removal Rate and Cutting Tool Flank Wear in Turning Using Extended Taguchi Approach 3ଦିଲ୍ଲୀପ କୁମାର ମହାନ୍ତNo ratings yet
- Presses and Equipment For SheetMetal DiesDocument153 pagesPresses and Equipment For SheetMetal Diessamurai7_77No ratings yet
- Visual Structure of Works of ArtsDocument2 pagesVisual Structure of Works of ArtsAlvie P. Bergado83% (6)
- Die Set Engineering Handbook and CatalogDocument144 pagesDie Set Engineering Handbook and CatalogEduardo Medel50% (2)
- The Ultimate Guide To InventorDocument10 pagesThe Ultimate Guide To InventorGuido MullaertNo ratings yet
- Metal Forming OverviewDocument120 pagesMetal Forming OverviewSang Ka KalaNo ratings yet
- Hrvatsko Engleski RjecnikDocument737 pagesHrvatsko Engleski RjecnikBlaz Ladika Jr.100% (1)
- Uddeholm Heat Treatment Eng 1710 E9Document20 pagesUddeholm Heat Treatment Eng 1710 E9Sinan YıldızNo ratings yet
- AQU4518R59v06 - 3750 DatasheetDocument2 pagesAQU4518R59v06 - 3750 Datasheetkitticom rNo ratings yet
- Multicomponent Distillation CalculationsDocument5 pagesMulticomponent Distillation CalculationsPatricia DavidNo ratings yet
- Manufacturing Rocesses - I - Unit III - Plastic ProcessingDocument22 pagesManufacturing Rocesses - I - Unit III - Plastic ProcessingPramod WadateNo ratings yet
- Design of Thermal Power Plant Turbogenerator FoundationDocument19 pagesDesign of Thermal Power Plant Turbogenerator FoundationDeepu PillaiNo ratings yet
- Solution Manual For Numerical Methods For Engineers 7th Edition by ChapraDocument27 pagesSolution Manual For Numerical Methods For Engineers 7th Edition by Chapraa23971102936% (25)
- 650Document25 pages650Eldori1988No ratings yet
- Claw Pole Forging ProcessDocument8 pagesClaw Pole Forging ProcessBhagat SinghNo ratings yet
- Power Press Tools and MachinesDocument60 pagesPower Press Tools and MachinesThulasi RamNo ratings yet
- Power Presses: Maintenance and Thorough ExaminationDocument50 pagesPower Presses: Maintenance and Thorough ExaminationSathish PSKNo ratings yet
- Automation in Sheet Metal Tig Welding Process: A Case StudyDocument6 pagesAutomation in Sheet Metal Tig Welding Process: A Case StudyseventhsensegroupNo ratings yet
- Deep Drawing: Benefits and Industrial ApplicationsDocument3 pagesDeep Drawing: Benefits and Industrial ApplicationsChandru NatarajanNo ratings yet
- Design and Analysis of Press Tool MachineDocument5 pagesDesign and Analysis of Press Tool MachineArun GsNo ratings yet
- Getting Started: in This Hands-On Scenario You Will Experiment How To Quickly Position A Part in An AssemblyDocument34 pagesGetting Started: in This Hands-On Scenario You Will Experiment How To Quickly Position A Part in An Assemblyady1001No ratings yet
- Lecture Slide Metrology and Inspection - PPT PDFDocument30 pagesLecture Slide Metrology and Inspection - PPT PDFEdo EdgarNo ratings yet
- Machine Design Project PPT - NewDocument43 pagesMachine Design Project PPT - NewAdugna GosaNo ratings yet
- Appendix A - Tolerances For Impression DieDocument21 pagesAppendix A - Tolerances For Impression Diekkozak99No ratings yet
- C09Document19 pagesC09furtheronNo ratings yet
- ME 330 Manufacturing Processes Mechanical Assembly: Joining Methods (Cont.)Document23 pagesME 330 Manufacturing Processes Mechanical Assembly: Joining Methods (Cont.)mhafizanNo ratings yet
- Aluminium Mold BasesDocument20 pagesAluminium Mold BasessferrandNo ratings yet
- Die Design ParametersDocument3 pagesDie Design ParameterspunkhunkNo ratings yet
- VIOLI Straightening Brochure Low 012ukDocument4 pagesVIOLI Straightening Brochure Low 012ukirsalan_shahidNo ratings yet
- Metal Forming Processes ExplainedDocument114 pagesMetal Forming Processes ExplainedManoj Kumar SNo ratings yet
- GD&TDocument70 pagesGD&TKarthi KeyanNo ratings yet
- Design for Assembly ChapterDocument44 pagesDesign for Assembly ChapterTrâp A NâtïøñNo ratings yet
- Engineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyDocument26 pagesEngineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyRandøm TalkìêsNo ratings yet
- PunchingDocument231 pagesPunchingJulio Galvan100% (1)
- Experimental and Finite Element Evaluation of Bending for Mild SteelDocument24 pagesExperimental and Finite Element Evaluation of Bending for Mild SteelNhan LeNo ratings yet
- Design and Fabrication of Fixture For Labyrinth RingDocument6 pagesDesign and Fabrication of Fixture For Labyrinth RingAkhilesh KumarNo ratings yet
- Mould and Stamping ToolsDocument33 pagesMould and Stamping Toolsravinder majraNo ratings yet
- Sheet MetalDocument60 pagesSheet MetalAnonymous tQhtrPbNo ratings yet
- LIT00569 UltraThickTurret PN 2014 RevC Lo-ResDocument96 pagesLIT00569 UltraThickTurret PN 2014 RevC Lo-ResAntonio AguilarNo ratings yet
- 002005ea 2Document34 pages002005ea 2AliArababadiNo ratings yet
- Sample Pages Injection Mold Design Handbook: Bruce Catoen and Herbert ReesDocument59 pagesSample Pages Injection Mold Design Handbook: Bruce Catoen and Herbert ReescentroNo ratings yet
- Tema 5Document20 pagesTema 5Jaime GuiraoNo ratings yet
- Selection of Forging Equipment: Taylan Altan and Manas Shirgaokar, The Ohio State UniversityDocument11 pagesSelection of Forging Equipment: Taylan Altan and Manas Shirgaokar, The Ohio State UniversityEldori1988No ratings yet
- CIRP Annals - Manufacturing Technology: S. Chatti, M. Hermes, A.E. Tekkaya (1), M. KleinerDocument4 pagesCIRP Annals - Manufacturing Technology: S. Chatti, M. Hermes, A.E. Tekkaya (1), M. Kleiner1ere année ingNo ratings yet
- 2 Blazejewski PDFDocument15 pages2 Blazejewski PDFIram ChaviraNo ratings yet
- CH 13Document34 pagesCH 13ACC SHNo ratings yet
- Machine Tool Structures PDFDocument10 pagesMachine Tool Structures PDFMohan Nanjan S50% (2)
- Metal FormingDocument33 pagesMetal FormingSamir KhNo ratings yet
- MEE 332 05 RollingDocument27 pagesMEE 332 05 RollingAhmed AbdulrhmanNo ratings yet
- HARWIGDocument8 pagesHARWIGPham CongNo ratings yet
- Welding Key ConceptsDocument3 pagesWelding Key ConceptsannamachaaryaNo ratings yet
- 6400 Cosasco Hydrogen Probes: SeriesDocument4 pages6400 Cosasco Hydrogen Probes: Seriesdaha333No ratings yet
- Hydrogen Assisted Cold CrackingDocument6 pagesHydrogen Assisted Cold Crackingdaha333No ratings yet
- Corrosion Inducida Por HidrogenoDocument8 pagesCorrosion Inducida Por HidrogenoochableNo ratings yet
- From Process Parameters To Residual Stress Field: Complete Ultrasonic Shot Peening SimulationDocument5 pagesFrom Process Parameters To Residual Stress Field: Complete Ultrasonic Shot Peening Simulationdaha333No ratings yet
- Fleet Technology Ltd Develops New Pipeline Dent Assessment ModelDocument4 pagesFleet Technology Ltd Develops New Pipeline Dent Assessment Modeldaha333No ratings yet
- Hydrogen-Induced Cracking Along The Fusion Boundary of Dissimilar Metal WeldsDocument7 pagesHydrogen-Induced Cracking Along The Fusion Boundary of Dissimilar Metal WeldsMurugananthamParamasivamNo ratings yet
- HARWIGDocument8 pagesHARWIGPham CongNo ratings yet
- Professional 3D Scanning Solutions: OfficesDocument10 pagesProfessional 3D Scanning Solutions: OfficesbearjapanNo ratings yet
- Welding Features Excercise 001Document5 pagesWelding Features Excercise 001daha333No ratings yet
- TWI CSWIP 3.1 Wis 5 Welding Inspection: Codes & StandardsDocument3 pagesTWI CSWIP 3.1 Wis 5 Welding Inspection: Codes & Standardsdaha333No ratings yet
- Exam success strategiesDocument6 pagesExam success strategiesdaha333No ratings yet
- Welding Metallurgy: Dr. Eng. Hamed A. NagyDocument91 pagesWelding Metallurgy: Dr. Eng. Hamed A. Nagydaha333No ratings yet
- 2-2 18-19 - 2 - Abaqus PDFDocument12 pages2-2 18-19 - 2 - Abaqus PDFdaha333No ratings yet
- Beam TutorialDocument27 pagesBeam TutorialNgocTraiNguyenNo ratings yet
- Methods For Evaluating The Appearance of Hot Dip G PDFDocument9 pagesMethods For Evaluating The Appearance of Hot Dip G PDFCenascenascenascenasNo ratings yet
- Professional 3D Scanning Solutions: OfficesDocument10 pagesProfessional 3D Scanning Solutions: OfficesbearjapanNo ratings yet
- Carbon Steel Structure Painting ProcedureDocument10 pagesCarbon Steel Structure Painting Proceduredaha333No ratings yet
- Inspection and Test Plan For Painting: Inspecta Middle EastDocument2 pagesInspection and Test Plan For Painting: Inspecta Middle Eastdaha333No ratings yet
- UTPSchweisszusaetze GBDocument20 pagesUTPSchweisszusaetze GBSelvakpm06No ratings yet
- UTP Bestseller PDFDocument28 pagesUTP Bestseller PDFdaha333No ratings yet
- مكونات نقط اللحام شامل بنط اللحامDocument2 pagesمكونات نقط اللحام شامل بنط اللحامdaha333No ratings yet
- GalvInfoNote 1 4Document5 pagesGalvInfoNote 1 4KYAW SOENo ratings yet
- Utp Dur 250Document1 pageUtp Dur 250daha333No ratings yet
- Hot Dip Galvannealed: SteelDocument6 pagesHot Dip Galvannealed: Steeldaha333No ratings yet
- Morphology and Antimony Segregation of Spangles On Batch Hot-Dip Galvanized CoatingsDocument6 pagesMorphology and Antimony Segregation of Spangles On Batch Hot-Dip Galvanized Coatingsdaha333No ratings yet
- Metallic Coated Sheet Steel For Structural Building ProductsDocument3 pagesMetallic Coated Sheet Steel For Structural Building Productsdaha333No ratings yet
- Graphs CPPDocument2 pagesGraphs CPPAbhay SharmaNo ratings yet
- Astm A 751Document5 pagesAstm A 751Patricia MenaNo ratings yet
- Basic Electrical Technology (ESC 101-A) Module 1: DC Circuits Superposition TheoremDocument13 pagesBasic Electrical Technology (ESC 101-A) Module 1: DC Circuits Superposition TheoremtusharNo ratings yet
- Welding Machines Monomig 200ikDocument1 pageWelding Machines Monomig 200ikLucioNo ratings yet
- Name of Learner: - Grade & SectionDocument9 pagesName of Learner: - Grade & SectionAxel Nicerio RoveloNo ratings yet
- Branches of PhysicsDocument11 pagesBranches of PhysicsRahul JaiswalNo ratings yet
- Maths JEE Mains 2024 Question Papers With Answer Key PDFDocument11 pagesMaths JEE Mains 2024 Question Papers With Answer Key PDFinfieldirateNo ratings yet
- Science: Quarter 1 - Module 2 Changes in MaterialsDocument33 pagesScience: Quarter 1 - Module 2 Changes in MaterialsYoshidaNo ratings yet
- Sturm AW97I22N Protel Schematic & Footprints & PCB PictureDocument5 pagesSturm AW97I22N Protel Schematic & Footprints & PCB PicturehosseinarevanNo ratings yet
- TELESCOPEDocument10 pagesTELESCOPEDevrajNo ratings yet
- 7A Phase TransformationsDocument15 pages7A Phase TransformationsAhmed AliNo ratings yet
- Led Lum Brochure 001Document32 pagesLed Lum Brochure 001Diego Vergara TNo ratings yet
- 82400/82410 2/2-Way Diaphragm Valves DN 8 ... 50, G1/4 ... 2, 1 1/4 ... 2 NPT High Flow Rate Damped Operation Functional Compact Design Solenoid Interchangeable Without Tools (Document4 pages82400/82410 2/2-Way Diaphragm Valves DN 8 ... 50, G1/4 ... 2, 1 1/4 ... 2 NPT High Flow Rate Damped Operation Functional Compact Design Solenoid Interchangeable Without Tools (MoamenNo ratings yet
- Delta Function - From Wolfram MathWorldDocument4 pagesDelta Function - From Wolfram MathWorldGovind GopalNo ratings yet
- Nust ChemistryDocument137 pagesNust Chemistryahmed ilyasNo ratings yet
- Design a sensory center for food industryDocument3 pagesDesign a sensory center for food industryNguyễn ThuNo ratings yet
- HM 289 Experiments With A Pelton Turbine Gunt 848 PDF 1 en GBDocument3 pagesHM 289 Experiments With A Pelton Turbine Gunt 848 PDF 1 en GBbeshirNo ratings yet
- A1 Seminar Report-KomDocument24 pagesA1 Seminar Report-KomADITYA SURYAWANSHINo ratings yet
- Copa Express 1212Document130 pagesCopa Express 1212evoeletronicapfNo ratings yet
- Construction and Building Materials: Banana Leaves Ashes As Pozzolan For Concrete and Mortar of Portland CementDocument7 pagesConstruction and Building Materials: Banana Leaves Ashes As Pozzolan For Concrete and Mortar of Portland CementSWAPNILNo ratings yet
- Parts and Functions of Incandescent LampsDocument7 pagesParts and Functions of Incandescent LampsJessie Olantigue100% (1)