You might also like
- Ml20es PDFDocument8 pagesMl20es PDFباسم عوض الصلويNo ratings yet
- ASELRON ManualDocument33 pagesASELRON ManualВячеслав Якимов100% (3)
- VEGA mv900 VEG2000 Manual PDFDocument5 pagesVEGA mv900 VEG2000 Manual PDFخالدعبدالله86% (7)
- Mikel Momentum Lift Manual InglesDocument70 pagesMikel Momentum Lift Manual Inglessiox219150No ratings yet
- Binder 1Document140 pagesBinder 1tran xobon100% (4)
- FX-CAN Hardware Manual.V110.enDocument5 pagesFX-CAN Hardware Manual.V110.enL X100% (2)
- CAUTION: Cables Must Be 2.5mm2 NYAFDocument19 pagesCAUTION: Cables Must Be 2.5mm2 NYAFDmitriy ShevchenkoNo ratings yet
- Hedefsan User Manual EnglishpdfDocument40 pagesHedefsan User Manual EnglishpdfSamih Alraghban100% (3)
- QUADRO UNO Elevator Control Module User's ManualDocument29 pagesQUADRO UNO Elevator Control Module User's ManualRaymond Nohra100% (7)
- AX SERIES LIFT CONTROL CARDS USER MANUALDocument14 pagesAX SERIES LIFT CONTROL CARDS USER MANUALSuleman Amjad75% (4)
- FX-Cube-S Hardware Manual V100.enDocument4 pagesFX-Cube-S Hardware Manual V100.enВячеслав Якимов100% (3)
- HD200XSUserManual PDFDocument18 pagesHD200XSUserManual PDFWassim Baccari33% (3)
- Arl-300 Electrical Diagrams V15Document112 pagesArl-300 Electrical Diagrams V15MajidKholadi100% (1)
- Eko 10 PDFDocument6 pagesEko 10 PDFJavier Martínez75% (4)
- HD BE Parameter List & ErrorDocument23 pagesHD BE Parameter List & ErrorHedefsan Trade100% (5)
- Panasonic AAD03061Document9 pagesPanasonic AAD03061Nguyễn ThànhNo ratings yet
- Sanyo Elevator User Guide Safety InstallationDocument158 pagesSanyo Elevator User Guide Safety InstallationAngel Iglesias100% (1)
- U-STO Parametre Kılavuzu V1.00 TRDocument38 pagesU-STO Parametre Kılavuzu V1.00 TRSalah Salah100% (1)
- S8 Series Elevator Intergrated Controller User Instruction V3.3Document186 pagesS8 Series Elevator Intergrated Controller User Instruction V3.3Nguyen Vuong100% (3)
- NICE1000new Integrated Elevator Controller User ManualDocument205 pagesNICE1000new Integrated Elevator Controller User ManualVinay SharmaNo ratings yet
- Number: SJG 08-007: (Electrical Parts)Document49 pagesNumber: SJG 08-007: (Electrical Parts)Tadeo Benegusenga50% (6)
- Manual Nice900Document99 pagesManual Nice900Yok Mulyono0% (2)
- Momentum Plus: Lift Controller Operation ManualDocument57 pagesMomentum Plus: Lift Controller Operation Manualafvt67% (3)
- ML65X Manual PDFDocument16 pagesML65X Manual PDFMohammad KazimNo ratings yet
- ARCODE Geared - enDocument40 pagesARCODE Geared - enAliRouyou67% (3)
- BL2000-BHT-V22ENGLISH Two Speed PDFDocument48 pagesBL2000-BHT-V22ENGLISH Two Speed PDFhabibulla50% (2)
- Control Panel Board ELEMPU User ManualDocument40 pagesControl Panel Board ELEMPU User Manualmohammad ghassan83% (6)
- Mont 20 Door Drive ParameterDocument1 pageMont 20 Door Drive ParameterVinay Sharma100% (1)
- AMC 528 V8: User'S Manual And Technical Specification GSM 89864.4000МЕDocument23 pagesAMC 528 V8: User'S Manual And Technical Specification GSM 89864.4000МЕAbenether Bekele100% (1)
- Winone Elevator Connection DiagramDocument40 pagesWinone Elevator Connection DiagramMuhammad Rashid75% (4)
- HD BE Easy Installation Manual GuideDocument18 pagesHD BE Easy Installation Manual GuideHedefsan TradeNo ratings yet
- Lisa Circuit DiagramDocument19 pagesLisa Circuit DiagramBrahim Chergui100% (1)
- مخطط كارت اركل ٣٠٠Document98 pagesمخطط كارت اركل ٣٠٠Brahim Chergui100% (1)
- ARL-300 Shaft Learning With Encoder-Installation Manual - enDocument14 pagesARL-300 Shaft Learning With Encoder-Installation Manual - enDaceDrop100% (7)
- Monarch Nice 1000 ManualDocument177 pagesMonarch Nice 1000 Manualleonardo jimenezNo ratings yet
- AGL 50-OMKAR Controller Parameters - Rev 0Document2 pagesAGL 50-OMKAR Controller Parameters - Rev 0mozhi selvam100% (1)
- AD009 Programming Manual Guide for ADCO Controls LiftsDocument17 pagesAD009 Programming Manual Guide for ADCO Controls Liftsdarlington86% (7)
- ARCODE Controller PID Gain Settings.V121.enDocument9 pagesARCODE Controller PID Gain Settings.V121.enSaighi Hamza100% (1)
- YS-K01 Door Drive ManualDocument46 pagesYS-K01 Door Drive ManualMuhammad Rashid100% (6)
- Install Shaft Encoder ManualDocument14 pagesInstall Shaft Encoder ManualMohammad Kazim60% (5)
- YS K01 Operador Manual InglesDocument56 pagesYS K01 Operador Manual Inglesmohammad ghassan100% (3)
- KOYO Escalator Mainboard Manual BookDocument36 pagesKOYO Escalator Mainboard Manual BookFranklin Palacios86% (7)
- Controller ARMDocument25 pagesController ARMWahyu SetyawanNo ratings yet
- Astra V Astra V1.2 1.2: User'S ManualDocument38 pagesAstra V Astra V1.2 1.2: User'S ManualMalik Asif100% (1)
- GDKDocument30 pagesGDKRobert Aguilar100% (4)
- MONT71 Series Elevator Integrated Controller Starting Guide - Hpmont - V1.0Document49 pagesMONT71 Series Elevator Integrated Controller Starting Guide - Hpmont - V1.0Habibulla Bavaji100% (3)
- 《NICE5000 Integrated Elevator Controller User Manual》-英文 - V0.0 PDFDocument233 pages《NICE5000 Integrated Elevator Controller User Manual》-英文 - V0.0 PDFEmad QwareeqNo ratings yet
- BẢN VẼ MT70-2022Document31 pagesBẢN VẼ MT70-2022MảimêchinhchiếnVàYêuđương50% (2)
- VVVF Error Codes Meaning and SolutionsDocument7 pagesVVVF Error Codes Meaning and SolutionsIsaac Mangochi100% (2)
- Sec Electronics: G - Type Lift ControllerDocument56 pagesSec Electronics: G - Type Lift Controllermohammad ghassanNo ratings yet
- 2.wiring Manual AS380-17256008957538852032 PDFDocument28 pages2.wiring Manual AS380-17256008957538852032 PDFThaw Zin100% (2)
- ARKEL ARL300user Manual-1Document42 pagesARKEL ARL300user Manual-1Běŋ Yahiaoui Ặŷɱěŋ67% (3)
- SIGMA iAstar-S8 Integrated ControllerDocument143 pagesSIGMA iAstar-S8 Integrated ControllerJaydi Zambrano100% (3)
- Mitron Door Card User GuideDocument12 pagesMitron Door Card User GuideEdhem Smailbegović100% (8)
- HT34 Control PanelDocument19 pagesHT34 Control PaneljhfbtyNo ratings yet
- Control Board Manual - VEG310Document21 pagesControl Board Manual - VEG310toufik100% (2)
- SKY 65X PARAMETERSDocument8 pagesSKY 65X PARAMETERSEng BerryNo ratings yet
- ML25E ProgrammingDocument9 pagesML25E ProgrammingNour AbdoNo ratings yet
- ML40P ProgramlamaDocument9 pagesML40P ProgramlamaZazaNo ratings yet
- Programming lift systemsDocument8 pagesProgramming lift systemsBojan DrljachaNo ratings yet
- Sample Resignation Letter 1Document1 pageSample Resignation Letter 1partha_biswas_uiuNo ratings yet
- MLDOOR-X CAR DOOR CONTROL CARD USAGE MANUALDocument1 pageMLDOOR-X CAR DOOR CONTROL CARD USAGE MANUALMohammad Kazim100% (1)
- Ref BuildingDocument35 pagesRef BuildingTacho MmfNo ratings yet
- Sample Resignation Letter 1Document1 pageSample Resignation Letter 1partha_biswas_uiuNo ratings yet
- Chap 09 Solutions Ex 9 2 QmethodDocument8 pagesChap 09 Solutions Ex 9 2 QmethodRashadAnwaarNo ratings yet
- MODBUS-RTU Option for SV-iS5 ManualDocument33 pagesMODBUS-RTU Option for SV-iS5 ManualMohammad KazimNo ratings yet
- Designing Your Own TransformerDocument5 pagesDesigning Your Own TransformermoizliveNo ratings yet
- SV-Is7 Manual ENGDocument305 pagesSV-Is7 Manual ENGboba78No ratings yet
- Building ElevatorsDocument77 pagesBuilding Elevatorselmodeer9841100% (5)
- Install Shaft Encoder ManualDocument14 pagesInstall Shaft Encoder ManualMohammad Kazim60% (5)
- ADrive User Manual V40.EnDocument82 pagesADrive User Manual V40.Enoptimalibrahim100% (2)
- ARL-300 Lift Controller User Manual Setup GuideDocument42 pagesARL-300 Lift Controller User Manual Setup GuideBAAAK78% (98)
- Otis PDFDocument38 pagesOtis PDFMohammad KazimNo ratings yet
- Programming Lift SystemsDocument8 pagesProgramming Lift SystemsMohammad Kazim100% (1)
- DatasheetDocument1 pageDatasheetMohammad KazimNo ratings yet
- LEIA DL Unit Summary DL US GTBH3 v1Document1 pageLEIA DL Unit Summary DL US GTBH3 v1Mohammad KazimNo ratings yet
- HmsDocument21 pagesHmsMohammad KazimNo ratings yet
- Chap 09 Solutions Ex 9 2 QmethodDocument8 pagesChap 09 Solutions Ex 9 2 QmethodRashadAnwaarNo ratings yet
- Chap 10 Solutions Ex 10 1 MethodDocument2 pagesChap 10 Solutions Ex 10 1 MethodMuhammad Salman50% (2)
- Arl-500 Installation & Operation Manual v18Document79 pagesArl-500 Installation & Operation Manual v18paul5791100% (2)
- DatasheetDocument1 pageDatasheetMohammad KazimNo ratings yet
- Varispeed G7 Instruction ManualDocument417 pagesVarispeed G7 Instruction Manualamit1003_kumarNo ratings yet
- Ie5 DatasheetDocument2 pagesIe5 DatasheetMohammad KazimNo ratings yet
- Designing Your Own TransformerDocument5 pagesDesigning Your Own TransformermoizliveNo ratings yet
- ML65X Kullanim KilavuzuDocument16 pagesML65X Kullanim KilavuzuRefaat RaslanNo ratings yet
- Safe Escalator Usage TipsDocument1 pageSafe Escalator Usage TipsMohammad KazimNo ratings yet
- Chap 10 Solutions Ex 10 1 MethodDocument2 pagesChap 10 Solutions Ex 10 1 MethodMuhammad Salman50% (2)
- PLC basedSmartElevatorControlSystem PDFDocument81 pagesPLC basedSmartElevatorControlSystem PDFyounesNo ratings yet
- Water Level Controls Hydro GeneratorDocument29 pagesWater Level Controls Hydro Generatorfg_272056423No ratings yet
- Electrical Grounding System Safety GuideDocument24 pagesElectrical Grounding System Safety Guidemrfawad100% (1)
- International Journal of Emerging Technology & Research: Cost Oriented FMEA in A Mattress IndustryDocument6 pagesInternational Journal of Emerging Technology & Research: Cost Oriented FMEA in A Mattress IndustrymerildominicNo ratings yet
- Process Engineering & Design With Autocad P&Id & HysysDocument6 pagesProcess Engineering & Design With Autocad P&Id & HysysNoureddineNo ratings yet
- Chandra Mani Azad Path C-LANE Saristabad Patna (BIHAR) Pin No.800001Document2 pagesChandra Mani Azad Path C-LANE Saristabad Patna (BIHAR) Pin No.800001King HeartNo ratings yet
- 1707 NEC3 Price ListDocument5 pages1707 NEC3 Price ListVíctor CasadoNo ratings yet
- Seoul Conference Program (20190409)Document29 pagesSeoul Conference Program (20190409)januarfaNo ratings yet
- First Semester Time Table Autumn Semester 2023-24 (Tentative)Document13 pagesFirst Semester Time Table Autumn Semester 2023-24 (Tentative)jehomamNo ratings yet
- Chemical Engineering Thermodynamics Solution Manual PDFDocument725 pagesChemical Engineering Thermodynamics Solution Manual PDFNaveen100% (1)
- Research On HVDC Model in Transient Voltage Stability Analysis of AC/DC Transmission SystemsDocument2 pagesResearch On HVDC Model in Transient Voltage Stability Analysis of AC/DC Transmission SystemsSitiSaodahNo ratings yet
- HSD Studiengangflyer Mme EngDocument4 pagesHSD Studiengangflyer Mme EngPratik SoniNo ratings yet
- Ctw130 Yms PTW 02test PileDocument4 pagesCtw130 Yms PTW 02test Pilefalparslan5265No ratings yet
- Engineering Design Guidelines Pressure Vessel Rev1.2webDocument25 pagesEngineering Design Guidelines Pressure Vessel Rev1.2websachin nagavkarNo ratings yet
- Resume FrevahDocument1 pageResume Frevahapi-373862403No ratings yet
- Design Requirements for Pressure VesselsDocument176 pagesDesign Requirements for Pressure VesselsVimin Prakash100% (4)
- Distributed control system for load sharing using PIC microcontroller and renewable energy sourcesDocument10 pagesDistributed control system for load sharing using PIC microcontroller and renewable energy sourcesFuture Technovation75% (4)
- BBS For Test Pile-03 at OMG - 1000mm DiaDocument5 pagesBBS For Test Pile-03 at OMG - 1000mm DiaAjay MalikNo ratings yet
- Untitled 13Document5 pagesUntitled 13Ritesh Sharma0% (1)
- The Virginia Class Submarine ProgramDocument12 pagesThe Virginia Class Submarine Programcjnjr1No ratings yet
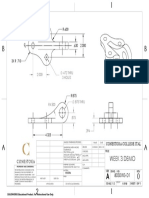
- Week 3 Demo: Conestoga College ItalDocument1 pageWeek 3 Demo: Conestoga College ItalODEH ABU YAHIANo ratings yet
- Hypar Shell Roofing With TRCDocument25 pagesHypar Shell Roofing With TRCnavaneeth baburajanNo ratings yet
- Guide - USACE Revit2012 Template Struc v1.1Document24 pagesGuide - USACE Revit2012 Template Struc v1.1huyxpkissNo ratings yet
- African Revolution (Sts Week 4)Document8 pagesAfrican Revolution (Sts Week 4)Krisanta ValenciaNo ratings yet
- Indian Engineering Services (IES) : Reference BooksDocument6 pagesIndian Engineering Services (IES) : Reference BooksKapilNo ratings yet
- Luke Richardson's ResumeDocument1 pageLuke Richardson's ResumeLukeNo ratings yet
- Kitchen Counter 2nd FLR (Shop Drawing) - PerspectiveDocument1 pageKitchen Counter 2nd FLR (Shop Drawing) - PerspectivejremptymakNo ratings yet
- UnethicalDocument14 pagesUnethicalAbdilatif Alcc100% (1)
- EIS Whitepaper PLM For Mechatronic Products 10 2009Document11 pagesEIS Whitepaper PLM For Mechatronic Products 10 2009khiladi2No ratings yet
- Section 801 Excavation Backfilling and Compaction For Sanitary SewersDocument17 pagesSection 801 Excavation Backfilling and Compaction For Sanitary SewersTAHER AMMARNo ratings yet
- Bob Ostertag - Creative LifeDocument222 pagesBob Ostertag - Creative LifeJoseph AnthonyNo ratings yet