You might also like
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Nonlinear Carrier Control Boosts Power FactorDocument7 pagesNonlinear Carrier Control Boosts Power FactorSv SandeepNo ratings yet
- Active Power Factor Corrector Verification Measurements With An OscilloscopeDocument12 pagesActive Power Factor Corrector Verification Measurements With An Oscilloscope林No ratings yet
- Current and Voltage Transformers: Network Protection & Automation GuideDocument22 pagesCurrent and Voltage Transformers: Network Protection & Automation GuideShailesh ChettyNo ratings yet
- 10 1109@pesc 1997 616727 PDFDocument7 pages10 1109@pesc 1997 616727 PDFjeos20132013No ratings yet
- Testing and Diagnostics of Medium- and High-Voltage Instrument TransformersDocument7 pagesTesting and Diagnostics of Medium- and High-Voltage Instrument TransformersRaúl Choque SandovalNo ratings yet
- Vol Stability SlidesDocument28 pagesVol Stability SlidessanthoshyeruvakaNo ratings yet
- Instrument Transformers For Relaying: W. A. ElmoreDocument13 pagesInstrument Transformers For Relaying: W. A. ElmoreAbhishek RajputNo ratings yet
- Average Current Mode Control of Switching Power Supplies: Application Note U - 1 4 0Document15 pagesAverage Current Mode Control of Switching Power Supplies: Application Note U - 1 4 0Vicente CabreraNo ratings yet
- Average Current Mode ControlDocument15 pagesAverage Current Mode Controlsmart2986No ratings yet
- One-Cycle Control of Switching ConvertersDocument9 pagesOne-Cycle Control of Switching ConvertersspschulzNo ratings yet
- 2929 Ijecs Ijens PDFDocument6 pages2929 Ijecs Ijens PDFbahmanNo ratings yet
- NPAG2012 Chap5 115to144Document30 pagesNPAG2012 Chap5 115to144mubarakkirkoNo ratings yet
- Av02 3698en An 1043 Common Mode NoiseDocument5 pagesAv02 3698en An 1043 Common Mode NoiseSirJones KekapohNo ratings yet
- Linear-Assisted DC/DC Regulator With Modified Current-Mode One-Cycle ControlDocument4 pagesLinear-Assisted DC/DC Regulator With Modified Current-Mode One-Cycle ControlEDhi RestoNo ratings yet
- analysis-of-predictive-control-for-active-power-factor-correctioDocument6 pagesanalysis-of-predictive-control-for-active-power-factor-correctioezloy80No ratings yet
- AC-AC (DC Link) - B.H.KWon PDFDocument10 pagesAC-AC (DC Link) - B.H.KWon PDFBui DaiNo ratings yet
- Angle Controlled Current Regulated Rectifiers For AC/AC ConvertersDocument7 pagesAngle Controlled Current Regulated Rectifiers For AC/AC ConvertersKanomba JavaNo ratings yet
- Advanced Power System UNIT II - Part 1 of 2Document53 pagesAdvanced Power System UNIT II - Part 1 of 2Jäšïm Üśmäñï100% (1)
- Single-Phase Voltage-Doubler Rectifier Using A Capacitive Energy Storage-Transfer MechanismDocument7 pagesSingle-Phase Voltage-Doubler Rectifier Using A Capacitive Energy Storage-Transfer Mechanismapi-3826450100% (1)
- MVCG61 Voltage Dependent Overcurrent PDFDocument10 pagesMVCG61 Voltage Dependent Overcurrent PDFOoi Ban JuanNo ratings yet
- Applications of Power Electronics To Power SystemsDocument9 pagesApplications of Power Electronics To Power SystemsManish meenaNo ratings yet
- Moffatt 2020Document4 pagesMoffatt 2020Alioth F.a.mNo ratings yet
- Fig. 1. Illustration of Network With Distributed Sources and StoragesDocument1 pageFig. 1. Illustration of Network With Distributed Sources and StoragesvainateyagoldarNo ratings yet
- Performance Characterization of Two Self-Oscillating Controllers for Resonant ConvertersDocument7 pagesPerformance Characterization of Two Self-Oscillating Controllers for Resonant ConvertersJie99No ratings yet
- A Novel Switch Mode DC-AC Inverter With Nonlinear Robust Control (IEEE-TIE)Document7 pagesA Novel Switch Mode DC-AC Inverter With Nonlinear Robust Control (IEEE-TIE)Al Bajad MamadNo ratings yet
- Switching Power Supply Current Measurements: Greg Hupp, Current Sensing ProductsDocument3 pagesSwitching Power Supply Current Measurements: Greg Hupp, Current Sensing ProductsLuis Carlos AlmeidaNo ratings yet
- Programmable DC Power Supply Line and Load RegulationDocument7 pagesProgrammable DC Power Supply Line and Load RegulationmoannaNo ratings yet
- Design of A Synchronous Rectified Switching Regulator Chip For CPU Power SupplyDocument4 pagesDesign of A Synchronous Rectified Switching Regulator Chip For CPU Power SupplysrdjanNo ratings yet
- 0MPRSR 2 ApplicationOfShuntReactorsDocument3 pages0MPRSR 2 ApplicationOfShuntReactorsChiranjeev SahooNo ratings yet
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- Chapter 4 - Analog Signal ConditioningDocument85 pagesChapter 4 - Analog Signal ConditioningVon JinNo ratings yet
- Resistencias Condensadores PDFDocument11 pagesResistencias Condensadores PDFCristobal GeneralNo ratings yet
- analysis-and-application-of-a-new-control-method-for-continuousmDocument7 pagesanalysis-and-application-of-a-new-control-method-for-continuousmezloy80No ratings yet
- DSP Based Control of Grid Interactive Inverter For Small Scale DG ApplicationsDocument4 pagesDSP Based Control of Grid Interactive Inverter For Small Scale DG ApplicationserpublicationNo ratings yet
- Model PrigusniceDocument7 pagesModel PrigusnicedankorankoNo ratings yet
- Reactive Power Compensation in Power Transmission & Distribution SystemDocument18 pagesReactive Power Compensation in Power Transmission & Distribution Systemamits.bhelNo ratings yet
- Slup 075Document12 pagesSlup 075Gowtham SanampalliNo ratings yet
- E3sconf Posei2021 02021Document4 pagesE3sconf Posei2021 02021WilliamNo ratings yet
- Power Supply Design with Fast Transient Response Using V2 Control SchemeDocument11 pagesPower Supply Design with Fast Transient Response Using V2 Control SchemeKing GervinhoNo ratings yet
- Direct AC/AC Converter Provides Simple Harmonic ReductionDocument7 pagesDirect AC/AC Converter Provides Simple Harmonic ReductionJAHANGEER AHMADNo ratings yet
- Static RelaysDocument11 pagesStatic RelaysBharathwaj SreedharNo ratings yet
- Neural Network Controllers For Power Factor Correction of AC/DC Switching ConvertersDocument8 pagesNeural Network Controllers For Power Factor Correction of AC/DC Switching ConvertersHuri PalacioNo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- Debra Band Ere 2007Document9 pagesDebra Band Ere 2007Fernando MoyaNo ratings yet
- PFC Small SignalDocument14 pagesPFC Small SignalMeral MeralNo ratings yet
- SEN and UPFCDocument11 pagesSEN and UPFCshayanshayanNo ratings yet
- A Novel High-Efficiency Inverter For Stand-Alone and Grid-Connected SystemsDocument6 pagesA Novel High-Efficiency Inverter For Stand-Alone and Grid-Connected Systemsvinsen letsoinNo ratings yet
- Advanced Digital Controls Improve PFC PerformanceDocument18 pagesAdvanced Digital Controls Improve PFC Performancediablo diablolordNo ratings yet
- Elimination of Voltage Sag/Swell Using Dynamic Voltage RestorerDocument5 pagesElimination of Voltage Sag/Swell Using Dynamic Voltage RestorerRezha YatoNo ratings yet
- Brod 1985Document9 pagesBrod 1985t64008No ratings yet
- IJE_Volume 27_Issue 1_Pages 123-130Document8 pagesIJE_Volume 27_Issue 1_Pages 123-130TamilselvanNo ratings yet
- Transformer-less DVR Compensates Voltage SagsDocument6 pagesTransformer-less DVR Compensates Voltage SagsSwathi PrasadNo ratings yet
- Power Pack: Constant Power Supply Kartik Kumar 1887021Document14 pagesPower Pack: Constant Power Supply Kartik Kumar 1887021Lakshay BhardwajNo ratings yet
- Isolated Bidirectional Full-Bridge DCDC Converter With A Flyback SnubberDocument8 pagesIsolated Bidirectional Full-Bridge DCDC Converter With A Flyback SnubberHsekum RamukNo ratings yet
- Applications of Ac Ac Converters in Electric Power SystemsDocument2 pagesApplications of Ac Ac Converters in Electric Power SystemsJesús CabezasNo ratings yet
- ARTIGO - Kersting 2010 - Distribution Feeder Voltage Regulation ControlDocument7 pagesARTIGO - Kersting 2010 - Distribution Feeder Voltage Regulation ControlAndrey LopesNo ratings yet
- Analog IC Design With Low-Dropout RegulatorsDocument374 pagesAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Leaflet English ILMEG Products ABDocument4 pagesLeaflet English ILMEG Products ABVelina MilevaNo ratings yet
- SKF WhitePaper Grease AnalysisDocument10 pagesSKF WhitePaper Grease AnalysisedgarpolNo ratings yet
- Designcompon 2Document1 pageDesigncompon 2Velina MilevaNo ratings yet
- Grease Fitting PDFDocument20 pagesGrease Fitting PDFleonardsiregarNo ratings yet
- ORIGINAL EQUIPMENT NUMBERS vs KOJEN MODEL BRANDSDocument24 pagesORIGINAL EQUIPMENT NUMBERS vs KOJEN MODEL BRANDSVelina MilevaNo ratings yet
- CAN Troubleshooting Sheet v3Document1 pageCAN Troubleshooting Sheet v3Velina MilevaNo ratings yet
- Design and Fab of Inductors For HTDocument18 pagesDesign and Fab of Inductors For HTVelina MilevaNo ratings yet
- Preventing Ceiling Cracking With Resilient ChannelsDocument5 pagesPreventing Ceiling Cracking With Resilient ChannelsVelina MilevaNo ratings yet
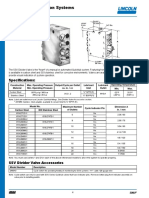
- Quicklub Lubrication Systems: SSV Divider ValvesDocument4 pagesQuicklub Lubrication Systems: SSV Divider ValvesVelina MilevaNo ratings yet
- GA-227 Recommendations For The Prevention of Ceiling CrackingDocument3 pagesGA-227 Recommendations For The Prevention of Ceiling CrackingVelina MilevaNo ratings yet
- MagDocument12 pagesMagAvs ElectronNo ratings yet
- GA 235 2017 Gypsum Board Typical Mechanical and Physical PropertiesDocument8 pagesGA 235 2017 Gypsum Board Typical Mechanical and Physical Propertiesb.fNo ratings yet
- Bds en 60065 2002 A11 2009Document16 pagesBds en 60065 2002 A11 2009Velina MilevaNo ratings yet
- Underwater Explosive Shock Testing UNDEX CM2000 PDFDocument11 pagesUnderwater Explosive Shock Testing UNDEX CM2000 PDFFernando Raúl LADINONo ratings yet
- Bds en Iso 8469 2013Document20 pagesBds en Iso 8469 2013Velina MilevaNo ratings yet
- Foundation Analysis and Design 1 PDFDocument48 pagesFoundation Analysis and Design 1 PDFagpsimoes100% (1)
- Super TacDocument2 pagesSuper TacVelina MilevaNo ratings yet
- Contractors Price ListDocument25 pagesContractors Price ListVelina MilevaNo ratings yet
- 9853 3221 01 Fluids and Lubricating GreasesDocument14 pages9853 3221 01 Fluids and Lubricating GreasesVelina MilevaNo ratings yet
- Effective Use of Water in A System For Water Driven Hammer DrillingDocument10 pagesEffective Use of Water in A System For Water Driven Hammer DrillingVelina MilevaNo ratings yet
- CDE washing plant increases Lagan Group quarry production by over 30Document5 pagesCDE washing plant increases Lagan Group quarry production by over 30Velina MilevaNo ratings yet
- MatexDocument2 pagesMatexVelina MilevaNo ratings yet
- NG CD 55a1111 A1-668341Document2 pagesNG CD 55a1111 A1-668341kpNo ratings yet
- Hydro Cyclone and JetDocument2 pagesHydro Cyclone and JetVelina MilevaNo ratings yet
- Performance Prediction Cf128G: Male Rotor Tip Speed in M/sDocument4 pagesPerformance Prediction Cf128G: Male Rotor Tip Speed in M/sVelina MilevaNo ratings yet
- Eng CD 827881 P1Document1 pageEng CD 827881 P1Velina MilevaNo ratings yet
- AWS A10.1M-2007 Calibration and Performance Testing of Secondary Current Sensing Coils and Weld PDFDocument56 pagesAWS A10.1M-2007 Calibration and Performance Testing of Secondary Current Sensing Coils and Weld PDFVelina MilevaNo ratings yet
- 52285Document1 page52285Velina MilevaNo ratings yet
- Technical Information No. 12 Vermicular Graphite Cast Iron: MicrostructureDocument1 pageTechnical Information No. 12 Vermicular Graphite Cast Iron: MicrostructureVelina MilevaNo ratings yet
- Guru Nanak Dev University, Amritsar: Notification No. B.Tech. (Mech. Engg.) (CBES) /-8th Semester/May-2019/1Document1 pageGuru Nanak Dev University, Amritsar: Notification No. B.Tech. (Mech. Engg.) (CBES) /-8th Semester/May-2019/1Nehal GuptaNo ratings yet
- Large Volume Kit PDFDocument42 pagesLarge Volume Kit PDFDanielRomeroNo ratings yet
- SAV Achieving Low Return Temperatures From RadiatorsDocument7 pagesSAV Achieving Low Return Temperatures From RadiatorsNikolay GeorgievNo ratings yet
- Linked PDFDocument337 pagesLinked PDFDmytro PichkurNo ratings yet
- GLA University - Student's No Dues DetailsDocument2 pagesGLA University - Student's No Dues DetailsRishi JakarNo ratings yet
- Management Science Chapter 11Document42 pagesManagement Science Chapter 11Myuran SivarajahNo ratings yet
- Fiber Optic Temperature Laser RadarDocument7 pagesFiber Optic Temperature Laser RadarLesther RivasNo ratings yet
- Test Your Knowledge On Pumps - Online Quiz - Chemical Engineering SiteDocument10 pagesTest Your Knowledge On Pumps - Online Quiz - Chemical Engineering Sitemyself_riteshNo ratings yet
- 2216 0280 Iee 40 01 E14Document18 pages2216 0280 Iee 40 01 E14Lal NandaniNo ratings yet
- IEEE MicropowerSystemModelingWithHOMERDocument5 pagesIEEE MicropowerSystemModelingWithHOMERAnnas QureshiNo ratings yet
- PA 201 Course SyllabusDocument9 pagesPA 201 Course SyllabusFayyaz DeeNo ratings yet
- Knowledge Management of Glendy, Aziel, Thor, KumalDocument7 pagesKnowledge Management of Glendy, Aziel, Thor, KumalrekcuftnucNo ratings yet
- Simulation of Methanol Synthesis in Packed Bed Reactor Based On Gas From Biomass GasificationDocument9 pagesSimulation of Methanol Synthesis in Packed Bed Reactor Based On Gas From Biomass GasificationHaris Surya HidayatNo ratings yet
- WEM 600 - Offshore Platform WeldingDocument26 pagesWEM 600 - Offshore Platform Weldingriqto100% (1)
- GE LOGIQ E9 Ultrasound Machine BrochureDocument7 pagesGE LOGIQ E9 Ultrasound Machine BrochureПётр Трашкун100% (1)
- G+1 Residential Building Bill of Quantity YITAYALDocument31 pagesG+1 Residential Building Bill of Quantity YITAYALYemane TsadikNo ratings yet
- Jack Welch's Leadership Transforms GEDocument2 pagesJack Welch's Leadership Transforms GEkimNo ratings yet
- How To Deal With Multiple SAP Logons - Simple Excel VBADocument14 pagesHow To Deal With Multiple SAP Logons - Simple Excel VBAangel saezNo ratings yet
- Design Regulations BKRDocument187 pagesDesign Regulations BKRn_costiqueNo ratings yet
- Peru 120W Solar All in One V2.0Document6 pagesPeru 120W Solar All in One V2.0luciano añorgaNo ratings yet
- DNV Otg - 02 Floating Liquefied Gas Terminals - tcm4-460301Document128 pagesDNV Otg - 02 Floating Liquefied Gas Terminals - tcm4-460301Jeril PhilipNo ratings yet
- 928g Bomba de Frenos Con SolenoideDocument6 pages928g Bomba de Frenos Con SolenoideMiguel Angel Garrido CardenasNo ratings yet
- Everyday English Vocabulary PDFDocument2 pagesEveryday English Vocabulary PDFSamantha0% (1)
- SAIL Catalogue: DownloadDocument16 pagesSAIL Catalogue: Downloadmishra usNo ratings yet
- Heat EnginesDocument4 pagesHeat EnginesZaib RehmanNo ratings yet
- JPEG Standard: ISO/IEC JTC1/SC29/WG10Document31 pagesJPEG Standard: ISO/IEC JTC1/SC29/WG10bumerrNo ratings yet
- Effect of COVID-19 On Global Supply ChainDocument4 pagesEffect of COVID-19 On Global Supply ChainInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Misubishi Engine S12R-PTADocument90 pagesMisubishi Engine S12R-PTAAnonymous uEt1sNhU7l100% (15)
- Universal Summit Nozzles Data SheetDocument2 pagesUniversal Summit Nozzles Data SheetNordson Adhesive Dispensing SystemsNo ratings yet
- Customer Feedback Form: To Send Your Feedback See Over The Page..Document2 pagesCustomer Feedback Form: To Send Your Feedback See Over The Page..sangho jeongNo ratings yet