You might also like
- Schizophrenia Symptom Alleviation Through Implementation of A Lifestyle Intervention ProgramDocument6 pagesSchizophrenia Symptom Alleviation Through Implementation of A Lifestyle Intervention ProgramDr.AhmadNo ratings yet
- Neuro Exam ReviewDocument6 pagesNeuro Exam ReviewDianne Flores100% (2)
- Python Programming For Mechanical EngineersDocument93 pagesPython Programming For Mechanical EngineerslucianoprocopioNo ratings yet
- Produce Stress-Free Precision Metal Parts Atom by AtomDocument12 pagesProduce Stress-Free Precision Metal Parts Atom by AtomVasavi VaasuNo ratings yet
- Effect of Current On EDMDocument58 pagesEffect of Current On EDMAli M. ElghawailNo ratings yet
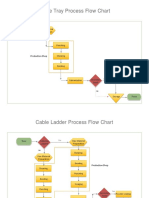
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- Dieless Wire DrawingDocument8 pagesDieless Wire DrawingRohit GothwalNo ratings yet
- 2020 - (Sankaran) - Data Analytics in Reservoir EngineeringDocument107 pages2020 - (Sankaran) - Data Analytics in Reservoir EngineeringPedro100% (1)
- Electrochemical Micromachining for Nanofabrication, MEMS and NanotechnologyFrom EverandElectrochemical Micromachining for Nanofabrication, MEMS and NanotechnologyRating: 4 out of 5 stars4/5 (1)
- Fabrication of Ic'sDocument14 pagesFabrication of Ic'sBhaskar Rao OndruNo ratings yet
- Mobile C Arm PortfolioDocument6 pagesMobile C Arm PortfolioAri ReviantoNo ratings yet
- Tool Based Micro MachiningDocument8 pagesTool Based Micro MachiningAnmol SatsangiNo ratings yet
- Electrolytic CellDocument24 pagesElectrolytic CellIntani Mundiartasari100% (1)
- Ensemble Marin OscillantDocument4 pagesEnsemble Marin OscillantRobson CarlosNo ratings yet
- Silicon Wafer ProcessingDocument8 pagesSilicon Wafer ProcessingWaqas AjmalNo ratings yet
- Journal of Materials Processing TechnologyDocument8 pagesJournal of Materials Processing TechnologyJaygopalj JayamohanNo ratings yet
- Sabotin WCMNM Paper FinalDocument5 pagesSabotin WCMNM Paper Finaljoskov71No ratings yet
- Fabrication of Cylindrical Micro Tools by Micro Electrochemical Form Turning OperationDocument9 pagesFabrication of Cylindrical Micro Tools by Micro Electrochemical Form Turning OperationPrapto PraptNo ratings yet
- Literature ReviewDocument34 pagesLiterature ReviewMuhammad WaleedNo ratings yet
- Reverse Edm Collective Electrodes in Micro EcmDocument5 pagesReverse Edm Collective Electrodes in Micro EcmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Manufacture_of_a_Home-Made_Spot_Welding_Machine_frDocument4 pagesManufacture_of_a_Home-Made_Spot_Welding_Machine_frkimtuan835958549964No ratings yet
- A Study On The Machining of High-Aspect Ratio Micro-Structures Using micro-EDMDocument8 pagesA Study On The Machining of High-Aspect Ratio Micro-Structures Using micro-EDMPeeyushiRaghavNo ratings yet
- 1optimization of Micro-WireDocument33 pages1optimization of Micro-WireAman BansalNo ratings yet
- Report 5 Axis EdmDocument5 pagesReport 5 Axis EdmAkhil JaiswalNo ratings yet
- Ultrasonic and Electric Discharge Machining To Deep and Small Hole On Titanium AlloyDocument6 pagesUltrasonic and Electric Discharge Machining To Deep and Small Hole On Titanium AlloysatishmaanNo ratings yet
- Improved Electrical Discharge Machine (EDM) Servomechanism Controller For Machining Micro PitsDocument6 pagesImproved Electrical Discharge Machine (EDM) Servomechanism Controller For Machining Micro PitsKevin WellsNo ratings yet
- Silicon's Potential as a Versatile Mechanical MaterialDocument50 pagesSilicon's Potential as a Versatile Mechanical MaterialGopinath ChakrabortyNo ratings yet
- Development of Table Top Ultrasonic Assisted Sinking Micro Electrical Discharge Machining Set UpDocument19 pagesDevelopment of Table Top Ultrasonic Assisted Sinking Micro Electrical Discharge Machining Set UpPurece EugenNo ratings yet
- WIRE-EDM PROCESS EXPLAINEDDocument13 pagesWIRE-EDM PROCESS EXPLAINEDSwez RatanNo ratings yet
- Electromechanical Design MAN 515: Electrical Discharge MachineDocument11 pagesElectromechanical Design MAN 515: Electrical Discharge MachineAli EhabNo ratings yet
- Micro ECM IndiaDocument8 pagesMicro ECM IndiagskrabalNo ratings yet
- Electroformed Parts: E. N. CastellanoDocument8 pagesElectroformed Parts: E. N. CastellanosolquihaNo ratings yet
- 1 s2.0 S1875389215017770 MainDocument7 pages1 s2.0 S1875389215017770 MainaaliyaNo ratings yet
- Ahmad Raddad 1180814Document7 pagesAhmad Raddad 1180814ahmad raddadNo ratings yet
- Review Article On Different Types of EDM and Its Performance Parameter Micro EDM2018 04-25-16!17!50Document6 pagesReview Article On Different Types of EDM and Its Performance Parameter Micro EDM2018 04-25-16!17!50swatiNo ratings yet
- 2021 - ZULFIQAR Et Al Microelectronics Reliability pg1-3Document3 pages2021 - ZULFIQAR Et Al Microelectronics Reliability pg1-3Aziz SaadNo ratings yet
- Influence of EDM Process Parameters in Deep Hole Drilling of Inconel 718Document11 pagesInfluence of EDM Process Parameters in Deep Hole Drilling of Inconel 718Pranes RainaNo ratings yet
- Electromagnetic Forming - Hani Aziz AmeenDocument46 pagesElectromagnetic Forming - Hani Aziz AmeenHani Aziz AmeenNo ratings yet
- Comparative Analysis of Mild Steel and Zirconium Oxide CoatingsDocument13 pagesComparative Analysis of Mild Steel and Zirconium Oxide Coatingsk eswariNo ratings yet
- Sensor TheoryDocument11 pagesSensor Theorykasa NokeNo ratings yet
- Saving Energy and Natural Resource by Micro-Nanomachining: Cost Effective Small Volume Manufacturing of Mems DevicesDocument8 pagesSaving Energy and Natural Resource by Micro-Nanomachining: Cost Effective Small Volume Manufacturing of Mems DevicesdenghueiNo ratings yet
- Surface Mount Technology PresentationDocument23 pagesSurface Mount Technology Presentation11090480No ratings yet
- Precision Engineering: Ravinder Kumar, Inderdeep Singh TDocument7 pagesPrecision Engineering: Ravinder Kumar, Inderdeep Singh TAnonymous 5AmJ13mLkNo ratings yet
- Silicon Crystal As Mechanical MaterialDocument50 pagesSilicon Crystal As Mechanical MaterialNikhitha SaiNo ratings yet
- Samsung Electronics and Semiconductors ProductionDocument55 pagesSamsung Electronics and Semiconductors ProductionDovah KiinNo ratings yet
- VJTI A SuriDocument40 pagesVJTI A SuriDIPAK VINAYAK SHIRBHATENo ratings yet
- Process Design and Development of Electromagnetic Shearing MachineDocument9 pagesProcess Design and Development of Electromagnetic Shearing MachineIJMERNo ratings yet
- Automation in IndustryDocument4 pagesAutomation in IndustryFirozNo ratings yet
- The Microstructure and Mechanical Properties of Deposited-In718 by Selective Laser MeltingDocument6 pagesThe Microstructure and Mechanical Properties of Deposited-In718 by Selective Laser MeltingsfaNo ratings yet
- Georgia - 3D Toroidal Air-Core Inductor With Through-Wafer Interconnect For On-Chip IntegrationDocument4 pagesGeorgia - 3D Toroidal Air-Core Inductor With Through-Wafer Interconnect For On-Chip IntegrationChandra ShettyNo ratings yet
- Chap 27 Advanced Machining PPT MFG Chapter27 FinalDocument42 pagesChap 27 Advanced Machining PPT MFG Chapter27 FinalnguyenhoanNo ratings yet
- Fabrication, sensing and applications of MEMS/NEMS technologyDocument4 pagesFabrication, sensing and applications of MEMS/NEMS technologySanthosh Kumar ChittipoluNo ratings yet
- Experimental Study On Electrochemical Micromachining: B. Bhattacharyya, M. Malapati, J. MundaDocument8 pagesExperimental Study On Electrochemical Micromachining: B. Bhattacharyya, M. Malapati, J. MundaAnnada Prasad MoharanaNo ratings yet
- Potential Micro EdmDocument6 pagesPotential Micro EdmAdilahNo ratings yet
- Ultraprecision High Rate Anodic Dissolution Processes in EcmDocument7 pagesUltraprecision High Rate Anodic Dissolution Processes in EcmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Write A Note On Classification of IC and IC Packages. (Dec 2017)Document60 pagesWrite A Note On Classification of IC and IC Packages. (Dec 2017)5060 Karthikeyan. MNo ratings yet
- Finite Element Analysis of Wire Electrode On WEDM Process Using ANSYSDocument14 pagesFinite Element Analysis of Wire Electrode On WEDM Process Using ANSYSIJRASETPublicationsNo ratings yet
- File 1696992905 GUSBAS202131582 L1 SemiconductorWafersDocument5 pagesFile 1696992905 GUSBAS202131582 L1 SemiconductorWafersÃMĪT KUMAR SINGHNo ratings yet
- Electrode CoatingDocument8 pagesElectrode CoatingSaurabh JainNo ratings yet
- CAM Micromilling Strategies For Machining of Micro EDMDocument5 pagesCAM Micromilling Strategies For Machining of Micro EDMgande10No ratings yet
- Rapid Hybrid Tooling Based On CNC - and EDM-milling To Fabricate Lab-on-a-Chip SystemsDocument4 pagesRapid Hybrid Tooling Based On CNC - and EDM-milling To Fabricate Lab-on-a-Chip SystemsthanhphucphanNo ratings yet
- Finishing of Micro-EDMed Surface Based On ScanningDocument6 pagesFinishing of Micro-EDMed Surface Based On ScanningOmkar DashNo ratings yet
- Micro-Machining Techniques (Document30 pagesMicro-Machining Techniques (FirozNo ratings yet
- Wire EDM ProcessDocument10 pagesWire EDM Processgargi.gangwar.ecelliitkgpNo ratings yet
- Electromagnetic Shearing MachineDocument31 pagesElectromagnetic Shearing MachineANAND KRISHNANNo ratings yet
- An Investigation of The Damping Effects of Various Gas en - 2011 - Tribology IntDocument9 pagesAn Investigation of The Damping Effects of Various Gas en - 2011 - Tribology IntRaja Rajan RNo ratings yet
- WIRE EDM LikhithDocument5 pagesWIRE EDM LikhithAvengers AssembleNo ratings yet
- Electroforming TiB2 Copper Matrix Composite for EDM ElectrodesDocument21 pagesElectroforming TiB2 Copper Matrix Composite for EDM ElectrodesMariana Hernández PérezNo ratings yet
- Electrodeposition and Surface Treatment: in SituDocument13 pagesElectrodeposition and Surface Treatment: in SituMariana Hernández PérezNo ratings yet
- Hsu2008 Article EDMElectrodeManufacturingUsing PDFDocument10 pagesHsu2008 Article EDMElectrodeManufacturingUsing PDFMariana Hernández PérezNo ratings yet
- Particle Strengthening of The Surface of Copper Electrode For Electrical Discharge MachiningDocument7 pagesParticle Strengthening of The Surface of Copper Electrode For Electrical Discharge MachiningMariana Hernández PérezNo ratings yet
- The Fabrication of Electronic Packages From High Silicon Aluminium Alloys Using Thin Shell Electroformed (TSE) EDM ElectrodesDocument6 pagesThe Fabrication of Electronic Packages From High Silicon Aluminium Alloys Using Thin Shell Electroformed (TSE) EDM ElectrodesMariana Hernández PérezNo ratings yet
- CONRADDocument52 pagesCONRADMariana Hernández PérezNo ratings yet
- Copper Alloy UNS C23000: Sponsored LinksDocument2 pagesCopper Alloy UNS C23000: Sponsored LinksvinayNo ratings yet
- Hand Taps - Button Dies - Die Nuts - Screw Extractors - Holders - SetsDocument26 pagesHand Taps - Button Dies - Die Nuts - Screw Extractors - Holders - SetsQC RegianNo ratings yet
- Sehr I Time 2012 DelhiDocument1 pageSehr I Time 2012 DelhiVaibhav VermaNo ratings yet
- Rajalakshmi Engineering CollegeDocument2 pagesRajalakshmi Engineering CollegebalaNo ratings yet
- Guitar SetupDocument1 pageGuitar SetupEduardo Maia CardosoNo ratings yet
- ME 251 Lecture 1Document20 pagesME 251 Lecture 1Seth AnkamahNo ratings yet
- 5S Office OrganizationDocument14 pages5S Office Organizationthuy linh phamNo ratings yet
- Family Nomenclature and Same-Name Divinities in Roman Religion and MythologyDocument17 pagesFamily Nomenclature and Same-Name Divinities in Roman Religion and MythologyhNo ratings yet
- Game Theory Behavioral FinanceDocument5 pagesGame Theory Behavioral Financeplato363No ratings yet
- Grove RT422 22T PDFDocument4 pagesGrove RT422 22T PDFJulio QuilarqueNo ratings yet
- Memory QVL 3rd Gen AMD Ryzen ProcessorsDocument6 pagesMemory QVL 3rd Gen AMD Ryzen ProcessorsSouvik GuhaNo ratings yet
- FinalDocument6 pagesFinalIwan IwanNo ratings yet
- Welcome To Primary 1!Document48 pagesWelcome To Primary 1!Zoe WangNo ratings yet
- Sumalinog Teodoro Jr. LPDocument5 pagesSumalinog Teodoro Jr. LPDAITO CHRISTIAN DHARELNo ratings yet
- 2005-2010 Tacoma Bed Extender PT329-35050 Rev. A - PT329-35050Document8 pages2005-2010 Tacoma Bed Extender PT329-35050 Rev. A - PT329-35050kylemac123No ratings yet
- Rice Today Vol. 13, No. 3 One Rice, Thousand GoldDocument2 pagesRice Today Vol. 13, No. 3 One Rice, Thousand GoldRice TodayNo ratings yet
- 23 Section I GW Glasses Window System and MirrorsDocument58 pages23 Section I GW Glasses Window System and Mirrorsamir8100No ratings yet
- Aero 12ADocument2 pagesAero 12AIrwin XavierNo ratings yet
- Shantappa B K FinalDocument32 pagesShantappa B K Finalasmita patilNo ratings yet
- Fishing and Hunting Gear From Osseous Raw Materials in The Early Neolithic From SerbiaDocument12 pagesFishing and Hunting Gear From Osseous Raw Materials in The Early Neolithic From SerbiaDanaGrujićNo ratings yet
- PublicLifeUrbanJustice Gehl 2016-1Document119 pagesPublicLifeUrbanJustice Gehl 2016-1bronsteijnNo ratings yet
- Micom P44X: Numerical Distance Protection RelayDocument80 pagesMicom P44X: Numerical Distance Protection RelayKuenley TiNy OndeNo ratings yet