You might also like
- Electronic InterlockingDocument148 pagesElectronic InterlockingSanjeev Kumar73% (15)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Robot Monitoring of Power SystemsDocument23 pagesRobot Monitoring of Power SystemsJashuva Kiran86% (14)
- S26 AC Analog DigitalDocument98 pagesS26 AC Analog DigitalSourav MahatoNo ratings yet
- H Pss TechnicalDocument16 pagesH Pss TechnicalDawit Getachew MelsselNo ratings yet
- Demolition and excavation worksDocument30 pagesDemolition and excavation worksHafizan Hanafiah100% (3)
- Grade 12 marketing principles course outlineDocument4 pagesGrade 12 marketing principles course outlineE-dlord M-alabanan100% (3)
- Autonomous Robotic Monitoring of Underground Cable Systems: Dept - Eee, Rgit 1Document20 pagesAutonomous Robotic Monitoring of Underground Cable Systems: Dept - Eee, Rgit 1Saurav MarasiniNo ratings yet
- Robot Line Inspection LineScoutDocument2 pagesRobot Line Inspection LineScoutIrán Samir Percia VelásquezNo ratings yet
- A Roadmap For Automated Power Line Inspection. Maintenance and RepairDocument6 pagesA Roadmap For Automated Power Line Inspection. Maintenance and RepairshafieiNo ratings yet
- Mooring Chain Climbing Robot For NDT Inspection ApplicationsDocument9 pagesMooring Chain Climbing Robot For NDT Inspection ApplicationsSoledad AceitunoNo ratings yet
- A Roadmap For Automated Power Line Inspection. Maintenance and Repair.Document6 pagesA Roadmap For Automated Power Line Inspection. Maintenance and Repair.Syurriya LeedangNo ratings yet
- The Need For Next-Generation ROADM Networks: White PaperDocument15 pagesThe Need For Next-Generation ROADM Networks: White PaperVijay Kumar MNo ratings yet
- Electrical Inspection and Autometed Robot For Electrical Transmission Line InspectionDocument5 pagesElectrical Inspection and Autometed Robot For Electrical Transmission Line InspectionIJRASETPublicationsNo ratings yet
- 7 RemoteMonitoring PDFDocument7 pages7 RemoteMonitoring PDFIjaems JournalNo ratings yet
- Fiber-optic icing detection and dynamic rating systemDocument4 pagesFiber-optic icing detection and dynamic rating systemtdropulicNo ratings yet
- Advanced Railway Security System (Arss) Based On Zigbee Communication For Track Fault DetectionDocument23 pagesAdvanced Railway Security System (Arss) Based On Zigbee Communication For Track Fault DetectionRashmi100% (2)
- Experience of Delhi Metro with IEC 61850Document36 pagesExperience of Delhi Metro with IEC 61850Bhuvanes WaranNo ratings yet
- KingfishDocument4 pagesKingfishPrashant RanjanNo ratings yet
- Smart Metering Program: Utility Case Study - BC Hydro Smart MetersDocument13 pagesSmart Metering Program: Utility Case Study - BC Hydro Smart Metersmasudrana7300No ratings yet
- Broadband On Trains Generic DescriptionDocument19 pagesBroadband On Trains Generic Descriptionnayamaya63No ratings yet
- WadiLeban IWSHMDocument9 pagesWadiLeban IWSHMishu vohraNo ratings yet
- Robotic Cable InspctionDocument8 pagesRobotic Cable Inspctiongezu gebeyehuNo ratings yet
- Robotic Monitoring On Underground CableDocument5 pagesRobotic Monitoring On Underground CableSISWANTO0% (1)
- Robotics Monitoring of Power SystemDocument13 pagesRobotics Monitoring of Power SystemAkshay Shinde100% (2)
- Railway Traffic ControlDocument4 pagesRailway Traffic ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Applied Sciences: Aerial Robotics For Inspection and Maintenance: Special Issue EditorialDocument5 pagesApplied Sciences: Aerial Robotics For Inspection and Maintenance: Special Issue EditorialDan StrutheNo ratings yet
- Tethered Aerostats For CommunicationsDocument5 pagesTethered Aerostats For CommunicationsGordon DuffNo ratings yet
- Actuators 11 00367Document19 pagesActuators 11 00367chaiwei032No ratings yet
- Low Cost AvDocument5 pagesLow Cost AvrahulsundaresanNo ratings yet
- Applying IEC 61850 To Real Life: Modernization Project For 30 Electrical SubstationsDocument17 pagesApplying IEC 61850 To Real Life: Modernization Project For 30 Electrical SubstationsGovernmentHookerNo ratings yet
- The IP Anema System Family: Cable-Driven Parallel Robots For Industrial ApplicationsDocument6 pagesThe IP Anema System Family: Cable-Driven Parallel Robots For Industrial Applicationstayyabkhan00No ratings yet
- Transmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicDocument5 pagesTransmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded LogicIJRASETPublicationsNo ratings yet
- Corrintec Subsea Brochure PDFDocument8 pagesCorrintec Subsea Brochure PDFraaaghaffarNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document4 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- ADL High Throughput Satellites-Main ReportDocument20 pagesADL High Throughput Satellites-Main ReportSiapaajaNo ratings yet
- ECS-Testing Electrified Rail SystemsDocument51 pagesECS-Testing Electrified Rail Systemsbasel baransiNo ratings yet
- What Is CC-LinkDocument5 pagesWhat Is CC-LinkdejapanesenameNo ratings yet
- 6 1 Metrorail 3kVDCEMUTechnicalSpecificationsDocument72 pages6 1 Metrorail 3kVDCEMUTechnicalSpecificationsmkashkooli_scribdNo ratings yet
- Wireless Speed and Direction Control of DC Motor Using RF TechnologyDocument68 pagesWireless Speed and Direction Control of DC Motor Using RF TechnologySrinivasu Irlapati67% (12)
- Unni (-) For Lec-03-Long-Rage-WifiDocument6 pagesUnni (-) For Lec-03-Long-Rage-WifiisaanisaanNo ratings yet
- RoboticDocument2 pagesRoboticSyam K MohanNo ratings yet
- 00863909Document6 pages00863909Ingrid GiacomeliNo ratings yet
- B3 103Document11 pagesB3 103Marko KojicNo ratings yet
- 01FW BeverDocument18 pages01FW BeverVarun Mech SNo ratings yet
- Digital Substation TestsDocument10 pagesDigital Substation Testsraghavendran raghuNo ratings yet
- Andode Tuma PresentationDocument40 pagesAndode Tuma PresentationSintayehu TerefeNo ratings yet
- TCK Portable BrochureDocument10 pagesTCK Portable BrochureCarlos GonzalezNo ratings yet
- A Low-Cost Robotic System For The Efficient Visual Inspection of TunnelsDocument8 pagesA Low-Cost Robotic System For The Efficient Visual Inspection of TunnelsmojeebmashalNo ratings yet
- Ultra Low Latency MicrowaveDocument9 pagesUltra Low Latency MicrowaveMihaelNo ratings yet
- aUTOMATIC METERINGDocument12 pagesaUTOMATIC METERINGGSK MuhammadNo ratings yet
- Eight Way Traffic Light Control For High Density and Minimum Travel TimeDocument4 pagesEight Way Traffic Light Control For High Density and Minimum Travel TimeinventionjournalsNo ratings yet
- LightRadio WP1 Technical OverviewDocument16 pagesLightRadio WP1 Technical Overviewmaster irtNo ratings yet
- High Performance Switch SystemDocument22 pagesHigh Performance Switch SystemrikusveugerNo ratings yet
- Ace IEEEDocument6 pagesAce IEEEPavanmouliNo ratings yet
- SEA-ME-WE 6 SubCom CIF 21FEB2022 UpdateDocument3 pagesSEA-ME-WE 6 SubCom CIF 21FEB2022 UpdateiamatomatoNo ratings yet
- 47 S1Document19 pages47 S1bavar88No ratings yet
- Digital Microwave Radio: 1. Introduction To DMRDocument14 pagesDigital Microwave Radio: 1. Introduction To DMRgeraldstar22No ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Radio Stations: Installation, Design and PracticeFrom EverandRadio Stations: Installation, Design and PracticeRating: 5 out of 5 stars5/5 (2)
- Earth Resistance TestingDocument41 pagesEarth Resistance TestingWCLNo ratings yet
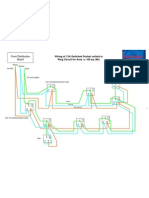
- Wiring of 13A Switched Socket Outlets in Ring CircuitDocument1 pageWiring of 13A Switched Socket Outlets in Ring Circuitsomapala88No ratings yet
- Assembling Types and Instructions: A. Solvent Cement Joint Nominal Diameters (MM)Document33 pagesAssembling Types and Instructions: A. Solvent Cement Joint Nominal Diameters (MM)shaman prabhashwaraNo ratings yet
- Comparison and Analysis of Temperature Rise Characteristic of Cable Under The Tunnel and PipeDocument7 pagesComparison and Analysis of Temperature Rise Characteristic of Cable Under The Tunnel and Pipeshaman prabhashwaraNo ratings yet
- 7102 25064 1 PBDocument15 pages7102 25064 1 PBMohammed RihamNo ratings yet
- Me f215 Mel Lab ManualDocument105 pagesMe f215 Mel Lab ManualpankazspamNo ratings yet
- GYROSCOPE ManualDocument8 pagesGYROSCOPE ManualAman BansalNo ratings yet
- Samantha Serpas ResumeDocument1 pageSamantha Serpas Resumeapi-247085580No ratings yet
- DEF CON 30 - Hadrien Barral - Emoji Shellcoding ?, ?, and ? - PresentationDocument141 pagesDEF CON 30 - Hadrien Barral - Emoji Shellcoding ?, ?, and ? - Presentationkumar sanjayNo ratings yet
- Solution Map For Mining ppt3952 PDFDocument29 pagesSolution Map For Mining ppt3952 PDFHans AcainNo ratings yet
- Hospital Food Service: October 2019Document28 pagesHospital Food Service: October 2019Shaikh Sobiya 57No ratings yet
- Drewry Capability StatementDocument9 pagesDrewry Capability Statementmanis_sgsNo ratings yet
- StressesDocument61 pagesStressesMuhammad MusaNo ratings yet
- Holes Human Anatomy and Physiology 12Th Edition Shier Test Bank Full Chapter PDFDocument53 pagesHoles Human Anatomy and Physiology 12Th Edition Shier Test Bank Full Chapter PDFJakeOwensbnpm100% (9)
- Akali NihangsDocument19 pagesAkali NihangsAngad YuvrajNo ratings yet
- Kanak Dhara StottramDocument9 pagesKanak Dhara Stottramdd bohraNo ratings yet
- Aquilion ONE GENESIS Edition Transforming CTDocument40 pagesAquilion ONE GENESIS Edition Transforming CTSemeeeJuniorNo ratings yet
- Valplast: Flexible, Esthetic Partial DenturesDocument4 pagesValplast: Flexible, Esthetic Partial Denturesአነኬ ቹህቺዶሃሠኪቺጆቺNo ratings yet
- 40 Inventive Principles Applied to Service OperationsDocument16 pages40 Inventive Principles Applied to Service Operationssina yadegariNo ratings yet
- European Commission: The Traineeships OfficeDocument3 pagesEuropean Commission: The Traineeships Officenasrine hachimNo ratings yet
- GlobexiaDocument18 pagesGlobexianurashenergyNo ratings yet
- Physics Universe ModelsDocument14 pagesPhysics Universe ModelsTracy zorca50% (2)
- The Impact of Interest Rates On Economic Growth in KenyaDocument41 pagesThe Impact of Interest Rates On Economic Growth in KenyaSAMUEL KIMANINo ratings yet
- Siemens: Building A Structure To Drive Performance and Responsibility - CaseDocument6 pagesSiemens: Building A Structure To Drive Performance and Responsibility - CaseBitopan SonowalNo ratings yet
- Eriopon R LiqDocument4 pagesEriopon R LiqsaskoNo ratings yet
- Abstract & Concrete NounsDocument2 pagesAbstract & Concrete NounsSitifatimah92No ratings yet
- Mechanical installation and maintenance guidelines for length counterDocument2 pagesMechanical installation and maintenance guidelines for length countervinod kumarNo ratings yet
- Dead Reckoning and Estimated PositionsDocument20 pagesDead Reckoning and Estimated Positionscarteani100% (1)
- LESSON PLAN On PancreasDocument4 pagesLESSON PLAN On PancreasShweta Pal100% (1)
- Week 1 - Revisiting and Evaluating FunctionsDocument12 pagesWeek 1 - Revisiting and Evaluating FunctionsShifra Jane PiqueroNo ratings yet
- Oxidation of CopperDocument21 pagesOxidation of CopperAmeen ShahidNo ratings yet
- EnrollNOLA Daily Seat Availability ReportDocument2 pagesEnrollNOLA Daily Seat Availability ReportAdvocateOnlineNo ratings yet
- Roke TsanDocument53 pagesRoke Tsanhittaf_05No ratings yet