You might also like
- Design Precise Ohmmeter Circuit Measure Resistances 0.01-10kΩ 0.1% AccuracyDocument5 pagesDesign Precise Ohmmeter Circuit Measure Resistances 0.01-10kΩ 0.1% AccuracyNabil IshamNo ratings yet
- Transformer Winding ResistanceDocument20 pagesTransformer Winding Resistancekajale.shrikantNo ratings yet
- Iec 62271-102-2018Document226 pagesIec 62271-102-2018DianaMuñozNo ratings yet
- Signal Conditioning CompleteDocument55 pagesSignal Conditioning CompletevikramNo ratings yet
- Chapter 3Document15 pagesChapter 3qalbeessaashiboNo ratings yet
- Module-5 Extra Material (Power Converters)Document69 pagesModule-5 Extra Material (Power Converters)NamiraNo ratings yet
- Chapter 3 eDocument50 pagesChapter 3 eEndalk SimegnNo ratings yet
- Testing Power Transformer MeasurementsDocument126 pagesTesting Power Transformer MeasurementsAnonymous EKVfZYQiegNo ratings yet
- ENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical QuantitiesDocument67 pagesENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical Quantitiesyccy1223No ratings yet
- The Negative Temperature Coefficient (NTC) Thermistor and Light-Dependent Resistor GuideDocument3 pagesThe Negative Temperature Coefficient (NTC) Thermistor and Light-Dependent Resistor GuideAyman Mohamed Hashim100% (1)
- ADEC - Lab 3Document14 pagesADEC - Lab 3syed furqan javedNo ratings yet
- Analog Electrical Devices and MeasurementsDocument21 pagesAnalog Electrical Devices and MeasurementsGabriel MarzinottoNo ratings yet
- HVDC ModelingDocument36 pagesHVDC ModelingVikashKumarNo ratings yet
- Transformer Winding Resistance Meter TRMDocument15 pagesTransformer Winding Resistance Meter TRMSyed Haider FaizanNo ratings yet
- Wheatstone BridgeDocument7 pagesWheatstone BridgeSilvio MadetyNo ratings yet
- General Physics Lab Report: Faculty of Engineering and TechnologyDocument19 pagesGeneral Physics Lab Report: Faculty of Engineering and TechnologyIzaNo ratings yet
- Dire Dawa University: Institute of TechnologyDocument49 pagesDire Dawa University: Institute of TechnologyAsed ZakirNo ratings yet
- Transformer TestingDocument33 pagesTransformer Testingiamketul6340No ratings yet
- Chapter 3Document124 pagesChapter 3Endalk SimegnNo ratings yet
- Transformer Testing PDFDocument42 pagesTransformer Testing PDFBiplab swainNo ratings yet
- 216 - EC8351, EC6304 Electronic Circuits I - Notes 1Document119 pages216 - EC8351, EC6304 Electronic Circuits I - Notes 1Rani VijayNo ratings yet
- Electronic Circuits 1Document119 pagesElectronic Circuits 1mohan100% (1)
- Different Testing Procedure of Power & Distribution TransformerDocument56 pagesDifferent Testing Procedure of Power & Distribution Transformermabmanikn100% (1)
- Lecture 17 - ACACDocument19 pagesLecture 17 - ACACĐạt Nguyễn XuânNo ratings yet
- Wheatstone Bridge Circuit GuideDocument6 pagesWheatstone Bridge Circuit Guidesagar4pranith4tNo ratings yet
- Laboratory Activity No. 8Document4 pagesLaboratory Activity No. 8Ian EbonesNo ratings yet
- EC6304 Notes PDFDocument119 pagesEC6304 Notes PDFpandiyarajan142611No ratings yet
- RESISTANCE TITLEDocument20 pagesRESISTANCE TITLEOlaoluwaAyodejiOmo-AkinNo ratings yet
- TEST ELKİTABI - Manual Turquia EnsaiosDocument23 pagesTEST ELKİTABI - Manual Turquia EnsaiosruimauricioferreiraNo ratings yet
- Data Presentation and RecordingDocument166 pagesData Presentation and RecordingPelly Pee MugobaNo ratings yet
- SP Lecture 2 BJT Amp SWDocument15 pagesSP Lecture 2 BJT Amp SWاحمد الفوليNo ratings yet
- Signal Conditioning and Conversion: Bridge CircuitDocument14 pagesSignal Conditioning and Conversion: Bridge CircuitAddisu Safo BoseraNo ratings yet
- Sinusoidal AC Circuit MeasurementsDocument17 pagesSinusoidal AC Circuit MeasurementsComputer Guru100% (4)
- Me 483 - 1Document69 pagesMe 483 - 1ElormeNo ratings yet
- Alternating Current CircuitsDocument8 pagesAlternating Current CircuitsShafiq HafizullahNo ratings yet
- Course Teacher: Dr. Muhammad Mohsin Aman Course Code: EE-523 Venue: Computer Laboratory, Department of Electrical Engineering, NED University KarachiDocument91 pagesCourse Teacher: Dr. Muhammad Mohsin Aman Course Code: EE-523 Venue: Computer Laboratory, Department of Electrical Engineering, NED University KarachiNaveed RabbaniNo ratings yet
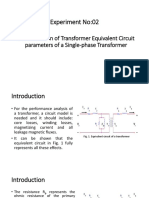
- Determination of Transformer Equivalent Circuit Parameters of ADocument18 pagesDetermination of Transformer Equivalent Circuit Parameters of AHaytham KenwayNo ratings yet
- Testing Manual 3Document29 pagesTesting Manual 3Rakesh KumarNo ratings yet
- 1a-Sensor Resistif-1 PDFDocument45 pages1a-Sensor Resistif-1 PDFSat SatrioNo ratings yet
- EC6304 Uw PDFDocument119 pagesEC6304 Uw PDFsivadhanuNo ratings yet
- Capacitor and Inductor Transient Response: ECE 270 Lab #4 Capacitors and InductorsDocument14 pagesCapacitor and Inductor Transient Response: ECE 270 Lab #4 Capacitors and InductorsAlex DixonNo ratings yet
- Voltage and Current DivisionDocument17 pagesVoltage and Current DivisionFenil DarjiNo ratings yet
- Analog Measuring InstrumentsDocument43 pagesAnalog Measuring Instrumentsmuvvala charithaNo ratings yet
- Chap5 Series DC CircuitsDocument60 pagesChap5 Series DC Circuitsbree789No ratings yet
- RecoveredDocument33 pagesRecoveredmahmoudsaeb10No ratings yet
- Short Circuit CalculationsDocument44 pagesShort Circuit Calculationssasikumar100% (2)
- AC-DC Bridge-PVD&CVDDocument46 pagesAC-DC Bridge-PVD&CVDvarshini yogarajanNo ratings yet
- Strain Gauge ProjectDocument18 pagesStrain Gauge ProjectAnkit GargNo ratings yet
- WheitStone Bridge For Temperature MeasurementDocument6 pagesWheitStone Bridge For Temperature MeasurementrajeshNo ratings yet
- Electrical and Electronics Measurement and InstrumentationDocument50 pagesElectrical and Electronics Measurement and InstrumentationNarayan S. Burbure100% (1)
- LAB # 12 Wheatstone Bridge and Ohmmeter: ObjectiveDocument3 pagesLAB # 12 Wheatstone Bridge and Ohmmeter: ObjectiveSardar Hamid ullahNo ratings yet
- Eee 436 Signal Conditioning 1Document24 pagesEee 436 Signal Conditioning 1Amr IbrahimNo ratings yet
- Week Eleventh On Eee327 3.33 Open-Circuit and Short-Circuit Tests On TransformerDocument8 pagesWeek Eleventh On Eee327 3.33 Open-Circuit and Short-Circuit Tests On TransformerEzekiel IyamuNo ratings yet
- VTU Guide Measures Resistance Using Wheatstone BridgeDocument18 pagesVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Module 2: Circuits and Electrical Components: Lesson 1: Circuit Elements and Constitutive RelationshipsDocument10 pagesModule 2: Circuits and Electrical Components: Lesson 1: Circuit Elements and Constitutive RelationshipsCerealNo ratings yet
- RC, RL, and RLC Circuit TransientsDocument11 pagesRC, RL, and RLC Circuit TransientsEce KayaNo ratings yet
- Slide 03Document15 pagesSlide 03Awais KhanNo ratings yet
- Lab Report Experiment 3 (C) To Verify Maximum Power Transfer TheoremDocument13 pagesLab Report Experiment 3 (C) To Verify Maximum Power Transfer TheoremArif Zain75% (12)
- 12/9/2019 Aku, Ait, Ece by Hagos G. 1Document37 pages12/9/2019 Aku, Ait, Ece by Hagos G. 1matusala abhaNo ratings yet
- Chapter 52 Wind PPDocument48 pagesChapter 52 Wind PPmatusala abhaNo ratings yet
- Course Outline PLDocument1 pageCourse Outline PLmatusala abhaNo ratings yet
- Programming Languages: Lecture 1 - Introduction ofDocument22 pagesProgramming Languages: Lecture 1 - Introduction ofmatusala abhaNo ratings yet
- Elementary DC Circuits WK 6 13 ModuleDocument91 pagesElementary DC Circuits WK 6 13 ModuleRolen GeocadinNo ratings yet
- Components-Of-Computer-Systems 20240130 080657 0000Document20 pagesComponents-Of-Computer-Systems 20240130 080657 0000Garrette ValenciaNo ratings yet
- Dayu 12Document3 pagesDayu 12Wayan SukerayasaNo ratings yet
- Ece131l Exp7Document4 pagesEce131l Exp7Carmela SapalaranNo ratings yet
- Oil Tan Delta and Resistivity Test - OTDDocument5 pagesOil Tan Delta and Resistivity Test - OTDAnand MandalNo ratings yet
- APJ Abdul Kalam Technological University S3 Exam ResultsDocument18 pagesAPJ Abdul Kalam Technological University S3 Exam ResultsKillerrootNo ratings yet
- Diagnostic Trouble Code Index for Audio Amplifier ModuleDocument4 pagesDiagnostic Trouble Code Index for Audio Amplifier ModuleJim LiebNo ratings yet
- Lecture 6Document45 pagesLecture 6eng fourmNo ratings yet
- Getting Started with the GPM82 Family: An IntroductionDocument21 pagesGetting Started with the GPM82 Family: An Introductionjuliano diasNo ratings yet
- Heart Beat Monitoring System by GSM TechnologyDocument51 pagesHeart Beat Monitoring System by GSM TechnologyArun Barc100% (1)
- Project PresentationDocument17 pagesProject PresentationBhushan JoshiNo ratings yet
- Img 0002Document16 pagesImg 0002Pournamy RameezNo ratings yet
- Cascadia HVAC Operation Part OneDocument1 pageCascadia HVAC Operation Part OneDonald Charles FernoughtyNo ratings yet
- 2490mf Service ManualDocument150 pages2490mf Service ManualNorbert HollanderNo ratings yet
- Understanding Audio FundamentalsDocument10 pagesUnderstanding Audio FundamentalsGolnaz AfsharNo ratings yet
- Drives At002 en PDocument162 pagesDrives At002 en Pdeepak satheeshNo ratings yet
- dm00237416 stm32f7 Series and stm32h7 Series Cortexm7 Processor Programming Manual Stmicroelectronics PDFDocument254 pagesdm00237416 stm32f7 Series and stm32h7 Series Cortexm7 Processor Programming Manual Stmicroelectronics PDFBraiyan Alex-ander HurtadoNo ratings yet
- Key-Ohms Law Problems Set 2Document1 pageKey-Ohms Law Problems Set 2RAVICHANDRAN SRINIVASANNo ratings yet
- Configuring HUAWEI II HandoverDocument7 pagesConfiguring HUAWEI II HandoverKalpesh GurjarNo ratings yet
- FbcsDocument344 pagesFbcskomal bandleNo ratings yet
- Disjuntor Siemens SBDocument98 pagesDisjuntor Siemens SBjoaoNo ratings yet
- D D D D D D D D D D: DescriptionDocument25 pagesD D D D D D D D D D: DescriptionSofywka SofaNo ratings yet
- Corrente DC - AcDocument4 pagesCorrente DC - AcMichael Antonio Cruz TrujilloNo ratings yet
- A12 enDocument9 pagesA12 enHever RodriguezNo ratings yet
- Delta Iabg C en 20210329Document156 pagesDelta Iabg C en 20210329karan kumarNo ratings yet
- Test 2 SolutionsDocument5 pagesTest 2 Solutionselvin 2wordsNo ratings yet
- LCR Meters, Impedance Analyzers and Test Fixtures: Keysight TechnologiesDocument15 pagesLCR Meters, Impedance Analyzers and Test Fixtures: Keysight Technologieskarthik4096No ratings yet
- B U Z 74, S - Diodo, 2,4A, 500V, Mosfet PDFDocument10 pagesB U Z 74, S - Diodo, 2,4A, 500V, Mosfet PDFManuel SierraNo ratings yet
- PIC16F87/88/89 - 18/20-Pin Enhanced FLASH Microcontroller Product Brief - 39568bDocument4 pagesPIC16F87/88/89 - 18/20-Pin Enhanced FLASH Microcontroller Product Brief - 39568bGuillermo HernandezNo ratings yet