You might also like
- Practice Final Exam Questions399Document17 pagesPractice Final Exam Questions399MrDorakonNo ratings yet
- Drama TeacherDocument5 pagesDrama TeacherJill Rasheed100% (1)
- Drama StudentDocument4 pagesDrama StudentJill RasheedNo ratings yet
- Sesloaf Science Garde 6-8Document90 pagesSesloaf Science Garde 6-8Mushtaque AnsariNo ratings yet
- Edition. Pearson Prentice Hall, Inc. 2004 (Chapter 2)Document13 pagesEdition. Pearson Prentice Hall, Inc. 2004 (Chapter 2)sayed02025022No ratings yet
- Focus: GlobalizationDocument23 pagesFocus: GlobalizationGALNo ratings yet
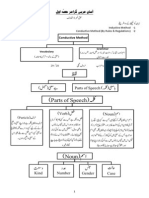
- مورفولوژیDocument163 pagesمورفولوژیFaiSal Khan100% (2)
- Ed Hort Afg Purdue Unita Lesson2 Importance HortDocument12 pagesEd Hort Afg Purdue Unita Lesson2 Importance HortMohammad Sadiq AsimNo ratings yet
- PDFDocument220 pagesPDFMashhoodNo ratings yet
- Pashto MD Bphs 2Document154 pagesPashto MD Bphs 2Pashto Afghan93% (14)
- په اسلام كې د حجاب فلسفه PDFDocument10 pagesپه اسلام كې د حجاب فلسفه PDFChief of the StaffNo ratings yet
- Pashto Adab Land TarekhDocument182 pagesPashto Adab Land Tarekhkhabarial.com100% (1)
- Osol PDFDocument35 pagesOsol PDFReza GholianNo ratings yet
- Scribd - Metaphisic Philosophie - Es.psDocument3 pagesScribd - Metaphisic Philosophie - Es.psBaruch R JhoiNo ratings yet
- کمونیزیم اصولDocument14 pagesکمونیزیم اصولAhmadullah ZadranNo ratings yet
- Bian ShrzadDocument148 pagesBian ShrzadFaiSal KhanNo ratings yet
- Pashto For 4GDocument135 pagesPashto For 4Ggurbatt100% (1)
- Construction Manual (Pashto)Document51 pagesConstruction Manual (Pashto)hasebsediqi1No ratings yet
- Pdfgrabber Trial Version Notice: 'X'-CharactersDocument12 pagesPdfgrabber Trial Version Notice: 'X'-CharactersمحمدعبداللهNo ratings yet
- آواشناسی زبان ترکی PDFDocument123 pagesآواشناسی زبان ترکی PDFsevdaNo ratings yet
- بارت- نشانه شناسی و فضای شهریDocument5 pagesبارت- نشانه شناسی و فضای شهریalirezajansonNo ratings yet
- (Parts of Speech) (Document16 pages(Parts of Speech) (Nadeem KhanNo ratings yet
- Quran With Saraiki Translation Complete in PDF Here Is The Link To Download para 17Document42 pagesQuran With Saraiki Translation Complete in PDF Here Is The Link To Download para 17ms170400726 SALAH UDDINNo ratings yet
- Jan 2008 Abu 3Document2 pagesJan 2008 Abu 3Ahmed MohamedNo ratings yet
- Chapter 2.2 Principles of FEMDocument130 pagesChapter 2.2 Principles of FEMSeyed Mahdi MousaviNo ratings yet
- TajikestanDocument50 pagesTajikestanPisces EdgeNo ratings yet
- Ar Ab Re P Ub L I C o F Eg Yp T: EDI CT OF GovernmentDocument27 pagesAr Ab Re P Ub L I C o F Eg Yp T: EDI CT OF Governmentcasaouis02No ratings yet
- War of ThoughtsDocument91 pagesWar of Thoughtsapi-3711329No ratings yet
- Ìn× Ûa N Ò at Ç ŽJ Ž Şšûa Čyžî ÁDocument14 pagesÌn× Ûa N Ò at Ç ŽJ Ž Şšûa Čyžî ÁAbu Abdullah Abulraheem alMadani.No ratings yet
- Quran With Saraiki Translation Complete in PDF Here Is The Link To Download para 12Document46 pagesQuran With Saraiki Translation Complete in PDF Here Is The Link To Download para 12ms170400726 SALAH UDDINNo ratings yet
- Sesloaf English Vi-Viii Reviewed 2Document52 pagesSesloaf English Vi-Viii Reviewed 2Mushtaque AnsariNo ratings yet
- Jorjani Khofealaei3 PDFDocument34 pagesJorjani Khofealaei3 PDFhooman_egNo ratings yet
- Www. AnatolianDocument9 pagesWww. Anatolianiman alaviNo ratings yet
- Akbari@iust - Ac.ir Nasser - S@iust - Ac.ir Bzamani@iust - Ac.irDocument5 pagesAkbari@iust - Ac.ir Nasser - S@iust - Ac.ir Bzamani@iust - Ac.irg4rb4g3No ratings yet
- Quran With Saraiki Translation Complete in PDF Here Is The Link To Download para 1Document44 pagesQuran With Saraiki Translation Complete in PDF Here Is The Link To Download para 1ms170400726 SALAH UDDINNo ratings yet
- G2 S1 S1 د مور او پلار حقونه پښتو PagesDocument15 pagesG2 S1 S1 د مور او پلار حقونه پښتو PagesBilal ahmadNo ratings yet
- Yazda - Understanding Expansion Tanks - TaylorDocument11 pagesYazda - Understanding Expansion Tanks - TaylorhosseinNo ratings yet
- سندروم فرد, اهمال کارDocument3 pagesسندروم فرد, اهمال کارماهان خدادادیNo ratings yet
- Jozve Riaziamar 12 Ensani (Nomreyar)Document44 pagesJozve Riaziamar 12 Ensani (Nomreyar)dashmmdx3pro128No ratings yet
- Consolidation FDocument37 pagesConsolidation FrezaebrNo ratings yet
- Quran Sayisida 1Document276 pagesQuran Sayisida 1محمد فارابيNo ratings yet
- Nvsss CompressedDocument18 pagesNvsss Compressedghirat46No ratings yet
- E-Mail:: Shirvani@skums - Ac.irDocument7 pagesE-Mail:: Shirvani@skums - Ac.irEndhy KurniawanNo ratings yet
- 91139Document57 pages91139RastoNo ratings yet
- Soil & Rocks MechanicsDocument46 pagesSoil & Rocks MechanicsHabib FatimiNo ratings yet
- 19664Document310 pages19664Iqdc CompanyNo ratings yet
- 19664Document310 pages19664Iqdc CompanyNo ratings yet
- Operating System 2. Disk Operating System 3. WindowsDocument6 pagesOperating System 2. Disk Operating System 3. WindowskhoshnamaNo ratings yet
- IIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIDocument7 pagesIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIMouhcinNo ratings yet
- Shamsuddoha 2009 SSRN Electronic Journal - En.faDocument8 pagesShamsuddoha 2009 SSRN Electronic Journal - En.fanadeem.14eaNo ratings yet
- Question Set1Document4 pagesQuestion Set1royadaneshi2001No ratings yet
- Dewaan-E-Rahman (Baba) Pashto Poetry BookDocument166 pagesDewaan-E-Rahman (Baba) Pashto Poetry BookAshhad AhmadNo ratings yet
- Quran With Saraiki Translation Complete in PDF Here Is The Link To Download para 30Document58 pagesQuran With Saraiki Translation Complete in PDF Here Is The Link To Download para 30ms170400726 SALAH UDDINNo ratings yet
- Understand The Qur'an For Elementary School Children-01Document31 pagesUnderstand The Qur'an For Elementary School Children-01Meaad Al-AwwadNo ratings yet
- Dec 2007 Abu 1Document3 pagesDec 2007 Abu 1Ahmed MohamedNo ratings yet
- Basic Verb Conjugation Chart Includes Past, Present, Command, & Verbal NounDocument4 pagesBasic Verb Conjugation Chart Includes Past, Present, Command, & Verbal NounMountainofknowledgeNo ratings yet
- Quran With Saraiki Translation Complete in PDF Here Is The Link To Download para 18Document45 pagesQuran With Saraiki Translation Complete in PDF Here Is The Link To Download para 18ms170400726 SALAH UDDINNo ratings yet
- COMSATS University Islamabad Lahore Campu1Document6 pagesCOMSATS University Islamabad Lahore Campu1Abdulhai KhanNo ratings yet
- BackgroundDocument3 pagesBackgroundAbdulhai KhanNo ratings yet
- Complete Information Requested: Project BriefDocument1 pageComplete Information Requested: Project BriefAbdulhai KhanNo ratings yet
- S 2 Project ManagemntDocument6 pagesS 2 Project ManagemntAbdulhai KhanNo ratings yet
- COMSATS University Islamabad Lahore Campus: Defence Road, Off Raiwind Road, Lahore. 042-111-001-007 Ext: 820, 803Document12 pagesCOMSATS University Islamabad Lahore Campus: Defence Road, Off Raiwind Road, Lahore. 042-111-001-007 Ext: 820, 803Abdulhai KhanNo ratings yet
- COMSATS Institute of Information Technology: Prepared By: Khalid Najib 401Document3 pagesCOMSATS Institute of Information Technology: Prepared By: Khalid Najib 401Abdulhai KhanNo ratings yet
- Khalid AssignmentDocument1 pageKhalid AssignmentAbdulhai KhanNo ratings yet
- Jurnal Statistik PDFDocument10 pagesJurnal Statistik PDFAni Yunita SariNo ratings yet
- A Framework For Digital Filter DesignDocument12 pagesA Framework For Digital Filter Designbalajibs203285No ratings yet
- Chapter - 1.6 Repetitive StructuresDocument93 pagesChapter - 1.6 Repetitive StructureshaileyNo ratings yet
- CSO504 Machine Learning: Evaluation and Error Analysis Validation and Regularization Koustav Rudra 22/08/2022Document28 pagesCSO504 Machine Learning: Evaluation and Error Analysis Validation and Regularization Koustav Rudra 22/08/2022Being IITianNo ratings yet
- Load GraphDocument6 pagesLoad GraphemailpuneethNo ratings yet
- Woytowich R.calculation of Prope - dec.1979.JSRDocument7 pagesWoytowich R.calculation of Prope - dec.1979.JSRJohn KokarakisNo ratings yet
- Theoretical Modelling of Ultrasonic Non-Destructive TestingDocument5 pagesTheoretical Modelling of Ultrasonic Non-Destructive TestingAmir JoonNo ratings yet
- Calculating Sequence Impedances of Transmission Line Using Pmu Measurements PDFDocument5 pagesCalculating Sequence Impedances of Transmission Line Using Pmu Measurements PDFLucas MarinhoNo ratings yet
- Cv-Dingbin HuangDocument1 pageCv-Dingbin Huangapi-373652633No ratings yet
- Chapter 19 Audit Sampling For Substantive TestingDocument14 pagesChapter 19 Audit Sampling For Substantive TestingRose Ann Russel0% (1)
- Dm640 and Dmd25 BrochureDocument2 pagesDm640 and Dmd25 BrochureHumor ChocograseroNo ratings yet
- New Guidance On Fire and Explosion EngineeringDocument11 pagesNew Guidance On Fire and Explosion EngineeringronnelNo ratings yet
- Astm D7460-10Document14 pagesAstm D7460-10ROBERTO MIRANDANo ratings yet
- 2-3 - ForceDocument67 pages2-3 - ForceKevin TanNo ratings yet
- GR Sheet 1Document2 pagesGR Sheet 1Kervyn XavierNo ratings yet
- sheniblog-QUICK REVISION - ARITHMETIC SEQUENCESDocument38 pagessheniblog-QUICK REVISION - ARITHMETIC SEQUENCESSuraj KumarNo ratings yet
- Mat 083 TheoryDocument3 pagesMat 083 Theorymustafa sertNo ratings yet
- CADM Lab ManualDocument16 pagesCADM Lab ManualRathnavel Ponnuswami100% (1)
- Icbgm 01 jg1Document8 pagesIcbgm 01 jg1Mejbahul SarkerNo ratings yet
- Class - Xii-Mysql and It Application NotesDocument36 pagesClass - Xii-Mysql and It Application NotesDeepanshu RajputNo ratings yet
- B.E (Comp. Science)Document25 pagesB.E (Comp. Science)shivaji university syllabus computer science 2002-2006100% (2)
- Question Bank - Section of SolidsDocument5 pagesQuestion Bank - Section of SolidstomsatNo ratings yet
- Nonlinear Analysis of Concrete Wall Buildings Using OpenseesDocument64 pagesNonlinear Analysis of Concrete Wall Buildings Using OpenseesAngga Fajar SetiawanNo ratings yet
- WARD 2008 - Spatial-Regression-Models CHAP 1 - SPATIALLY LAGGED DEPENDENT VARIABLESDocument21 pagesWARD 2008 - Spatial-Regression-Models CHAP 1 - SPATIALLY LAGGED DEPENDENT VARIABLESKarla LatNo ratings yet
- Exam Style Questions: GuidanceDocument8 pagesExam Style Questions: Guidancemagd osamaNo ratings yet
- Astronomy OlympiadeDocument7 pagesAstronomy OlympiadeMDPCOS SCHOOLNo ratings yet
- Lesson 7.1 Basic Properties and Laws of LogarithmsDocument10 pagesLesson 7.1 Basic Properties and Laws of LogarithmsKirsten Shayne Maningas100% (1)
- Gaussian PlumesDocument7 pagesGaussian PlumesVeky PamintuNo ratings yet
- Tuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesDocument4 pagesTuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesRicardo CampanaNo ratings yet