You might also like
- One Touch SurgeryDocument12 pagesOne Touch SurgerySergio Uscamaita FloresNo ratings yet
- 416E, 422E and 428E Backhoe Loader Hydraulic System: Fluid Power SymbolsDocument2 pages416E, 422E and 428E Backhoe Loader Hydraulic System: Fluid Power SymbolsJorge Mendoza100% (2)
- Intro Op AmpDocument44 pagesIntro Op AmpNimish PrabhakarNo ratings yet
- GATE (1991-2010) Solved Papers EEDocument261 pagesGATE (1991-2010) Solved Papers EEqwer0% (1)
- Lesson Plan On DVTDocument18 pagesLesson Plan On DVTAlma Susan100% (1)
- James Lull - Evolutionary Communication - An Introduction-Routledge (2020)Document343 pagesJames Lull - Evolutionary Communication - An Introduction-Routledge (2020)Fattma Silmiya -No ratings yet
- Motion For Provisional Authority SAMPLEDocument1 pageMotion For Provisional Authority SAMPLEyassercarloman60% (5)
- Report Consumer Behaviour On SamsungDocument24 pagesReport Consumer Behaviour On Samsungeira50% (2)
- Don - Nan Pump & SupplyDocument180 pagesDon - Nan Pump & Supplyjuliocanel2009100% (1)
- Competitive Profile Matrix (CPM)Document17 pagesCompetitive Profile Matrix (CPM)AaaaaaNo ratings yet
- Knox Academy Higher Physics Analogue Electronics Homework 1 Answer All QuestionsDocument6 pagesKnox Academy Higher Physics Analogue Electronics Homework 1 Answer All QuestionsknoxphysicsNo ratings yet
- Final Exam Bee4113 Sem 1 201011Document8 pagesFinal Exam Bee4113 Sem 1 201011Kung ChinHan100% (1)
- Mechatronics 1999 PaperDocument16 pagesMechatronics 1999 Paperaaroncete14No ratings yet
- Sem 3 Module 2Document5 pagesSem 3 Module 2shubhendra2No ratings yet
- CH-25 Deleted PDFDocument4 pagesCH-25 Deleted PDFKetanRaoNo ratings yet
- SKEE3263Excercise2 (Soln)Document7 pagesSKEE3263Excercise2 (Soln)sawsheng59No ratings yet
- Rectifiers: One Mark QuestionsDocument4 pagesRectifiers: One Mark QuestionsAbhinavNo ratings yet
- ECE3110Fa10 HW1solDocument7 pagesECE3110Fa10 HW1solSaied Aly SalamahNo ratings yet
- Sheet 4-1Document4 pagesSheet 4-1bodesaid2002No ratings yet
- Eepc28 Jun 2019Document2 pagesEepc28 Jun 2019AbhishekNo ratings yet
- Homework #2Document5 pagesHomework #2DavidRubeomNo ratings yet
- PUC EEE-311 Class-4Document16 pagesPUC EEE-311 Class-4Supreme FfNo ratings yet
- Tutorial 3 EEE1016 2022-2023 2Document5 pagesTutorial 3 EEE1016 2022-2023 2j2yshjzzsxNo ratings yet
- AssignDocument5 pagesAssignShourya TayalNo ratings yet
- STI PAC2 Fall 2018 SolvedDocument4 pagesSTI PAC2 Fall 2018 SolvedMarta Bordonaba Del RioNo ratings yet
- RC Circuit - 2019Document3 pagesRC Circuit - 2019thanhtoan2901No ratings yet
- Emt 212 Analogue Electronic Ii Tutorial #2Document5 pagesEmt 212 Analogue Electronic Ii Tutorial #2Alex ZXNo ratings yet
- KKKL2152 - Prelab and Instruction Op-Amp Application Sem 1 20222023Document19 pagesKKKL2152 - Prelab and Instruction Op-Amp Application Sem 1 20222023FARAH WADHIHAH BINTI ROSLINo ratings yet
- EEC501Document2 pagesEEC501raviNo ratings yet
- EC21101 Basic Electronics ES 2018Document4 pagesEC21101 Basic Electronics ES 2018Santanu KunduNo ratings yet
- T-6 FSC 12 CH 18 Electronics 07-03-24Document2 pagesT-6 FSC 12 CH 18 Electronics 07-03-24PHYSICS INNNo ratings yet
- Tutorial 1 PDFDocument9 pagesTutorial 1 PDF马铃淑No ratings yet
- Assignment 1Document3 pagesAssignment 1Dr. Balraj SinghNo ratings yet
- Candidates Are Required To Give Their Answers in Their Own Words As Far As Practicable. The Figures in The Margin Indicate Full MarksDocument3 pagesCandidates Are Required To Give Their Answers in Their Own Words As Far As Practicable. The Figures in The Margin Indicate Full MarksAdhikari SushilNo ratings yet
- Multiple Choice Questions: S. Y. B. Sc. Physics Paper - II, Sem-IIIDocument11 pagesMultiple Choice Questions: S. Y. B. Sc. Physics Paper - II, Sem-IIIQasim M100% (1)
- Investigation of Transistor Characteristics Common Emitter CircuitDocument2 pagesInvestigation of Transistor Characteristics Common Emitter Circuitola pedensNo ratings yet
- Digital To Analog Converter (Dac)Document3 pagesDigital To Analog Converter (Dac)Shimaa BarakatNo ratings yet
- Gateeasy D To A PDFDocument3 pagesGateeasy D To A PDFShubham kumarNo ratings yet
- 2022-2023-Tri 3-EEE1046-Tutorial 2Document4 pages2022-2023-Tri 3-EEE1046-Tutorial 2j2yshjzzsxNo ratings yet
- Chapter-19 Alternating Current and Electromagnetic Waves (PG 359 - 366)Document8 pagesChapter-19 Alternating Current and Electromagnetic Waves (PG 359 - 366)dummymail6383No ratings yet
- DL 290Document3 pagesDL 290Gagan SLNo ratings yet
- EC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, CDocument4 pagesEC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, Cbrahma2deen2chaudharNo ratings yet
- Lab 6Document5 pagesLab 6svijiNo ratings yet
- ECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXDocument11 pagesECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXXxx CccNo ratings yet
- ECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXDocument11 pagesECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXXxx CccNo ratings yet
- Ejercicios de MOSFETDocument5 pagesEjercicios de MOSFETLuis Enrique GarcíaNo ratings yet
- John Mark A. Carpio Industrial Electronics Bsee-4A JANUARY 9, 2018Document14 pagesJohn Mark A. Carpio Industrial Electronics Bsee-4A JANUARY 9, 2018John Mark CarpioNo ratings yet
- Taller2 FullDocument5 pagesTaller2 FullAlexander DitestaNo ratings yet
- Sheet 1 هندسة الكترونيهDocument4 pagesSheet 1 هندسة الكترونيهAhmed GamalNo ratings yet
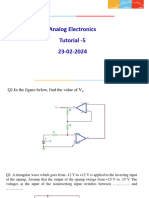
- Tutorial 5Document16 pagesTutorial 5Sayam SanchetiNo ratings yet
- Power Electronics Summative 202 SaturdayDocument3 pagesPower Electronics Summative 202 SaturdayTấn Long Đoàn NguyễnNo ratings yet
- Exp9 s04Document8 pagesExp9 s04SITI HAJAR AzizNo ratings yet
- Aptransco Electronic Engn 2011 Previous Paper 5c60dbb7Document22 pagesAptransco Electronic Engn 2011 Previous Paper 5c60dbb7Navyadeepika. KokkiralaNo ratings yet
- Sboa 325Document6 pagesSboa 325abhishek tiwariNo ratings yet
- Op AmpsDocument63 pagesOp AmpsShehryar HumayunNo ratings yet
- HW 2Document3 pagesHW 2Emir OmerdicNo ratings yet
- 7c634fcdEndSem 2022Document3 pages7c634fcdEndSem 2022biggusdiggus38No ratings yet
- Assignment 03Document5 pagesAssignment 03Akshay KumarNo ratings yet
- Manual of Experiments Expt 3Document3 pagesManual of Experiments Expt 3utkarshpatel.up04No ratings yet
- Gate Question Paper 2015Document10 pagesGate Question Paper 2015Krupesh KotakNo ratings yet
- OP-AMP SheetDocument14 pagesOP-AMP SheetAye Thein MaungNo ratings yet
- Electronic Devices 9th Edition - CHP 2 Basic ProblemsDocument9 pagesElectronic Devices 9th Edition - CHP 2 Basic ProblemsThivhulawi MukondeleliNo ratings yet
- T S Ia SDocument7 pagesT S Ia S1nshsankritNo ratings yet
- Quiz Eldas 2Document2 pagesQuiz Eldas 2Ilham Perdana ATNo ratings yet
- ESC 201A ExpDocument3 pagesESC 201A Expanshikamittal2626No ratings yet
- Stucor QP Ee8552Document21 pagesStucor QP Ee8552Raagul SNo ratings yet
- Eee1 HW 2Document3 pagesEee1 HW 2Averly Jerryl EscotoNo ratings yet
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Slides R3Document3 pagesSlides R3aaroncete14No ratings yet
- Mechatronics 1998 PaperDocument16 pagesMechatronics 1998 Paperaaroncete14No ratings yet
- Integrating Wind: 9 AC Networks I: Phasors and ImpedanceDocument36 pagesIntegrating Wind: 9 AC Networks I: Phasors and Impedanceaaroncete14No ratings yet
- Slides R2Document5 pagesSlides R2aaroncete14No ratings yet
- Slides 10Document33 pagesSlides 10aaroncete14No ratings yet
- 8 Diodes and RectifiersDocument23 pages8 Diodes and Rectifiersaaroncete14No ratings yet
- TBM L8Document39 pagesTBM L8aaroncete14No ratings yet
- TBM L3Document21 pagesTBM L3aaroncete14No ratings yet
- Compound TensesDocument1 pageCompound Tensesaaroncete14No ratings yet
- TBM L4 Design and StylingDocument28 pagesTBM L4 Design and Stylingaaroncete14No ratings yet
- TBM L3Document8 pagesTBM L3aaroncete14No ratings yet
- TBM L4Document8 pagesTBM L4aaroncete14No ratings yet
- 2012solutionsa2a5a910b3 PDFDocument5 pages2012solutionsa2a5a910b3 PDFaaroncete14No ratings yet
- TBM L2 PDFDocument8 pagesTBM L2 PDFaaroncete14No ratings yet
- A2 2012 PDFDocument1 pageA2 2012 PDFaaroncete14No ratings yet
- B N R B R D: A) The Boundary ConditionDocument1 pageB N R B R D: A) The Boundary Conditionaaroncete14No ratings yet
- Control Tutorial Answers 1Document5 pagesControl Tutorial Answers 1aaroncete14No ratings yet
- Answers and Hints: Thermodynamics and Energy 2012Document1 pageAnswers and Hints: Thermodynamics and Energy 2012aaroncete14No ratings yet
- University of London Meng Examinations 2006 Part III, Mechanical EngineeringDocument7 pagesUniversity of London Meng Examinations 2006 Part III, Mechanical Engineeringaaroncete14No ratings yet
- Imperial College London Meng Examinations 2010Document7 pagesImperial College London Meng Examinations 2010aaroncete14No ratings yet
- Transducer Transduction Principle Applications Advantages DisadvantagesDocument3 pagesTransducer Transduction Principle Applications Advantages Disadvantagesaaroncete14No ratings yet
- MSD Tutorial 1 ArialDocument3 pagesMSD Tutorial 1 Arialaaroncete14No ratings yet
- MSD Part 2 Vibrations 2012Document67 pagesMSD Part 2 Vibrations 2012aaroncete14No ratings yet
- MSD Tutoral 3Document1 pageMSD Tutoral 3aaroncete14No ratings yet
- MSD Tutorial 2 ArialDocument2 pagesMSD Tutorial 2 Arialaaroncete14No ratings yet
- H) Questions.: Ion/.orr-'Crles Rf'aDocument2 pagesH) Questions.: Ion/.orr-'Crles Rf'aakshayNo ratings yet
- Version For Internet Nutrition Spreadsheet (With Workout Tracker)Document10 pagesVersion For Internet Nutrition Spreadsheet (With Workout Tracker)GeraldyneNo ratings yet
- BED-2912-0000922351 Backend Development Vijay Vishvkarma: Phase I - Qualifier Round 1Document1 pageBED-2912-0000922351 Backend Development Vijay Vishvkarma: Phase I - Qualifier Round 1vijayNo ratings yet
- luZ6Vv70 PDFDocument12 pagesluZ6Vv70 PDFAna BelleNo ratings yet
- Options Strategies Model PaperDocument11 pagesOptions Strategies Model PaperAshish Singh100% (1)
- 1MRK511261-UEN - en Engineering Manual 650 Series 1.2 IECDocument128 pages1MRK511261-UEN - en Engineering Manual 650 Series 1.2 IECsabah nooriNo ratings yet
- How To Start An Incubation CenterDocument10 pagesHow To Start An Incubation CenterKavita RaniNo ratings yet
- UNFPA-IDN-RFQ-19-004 - Packaging & Shipping - HIV PDFDocument21 pagesUNFPA-IDN-RFQ-19-004 - Packaging & Shipping - HIV PDFPengais HarahapNo ratings yet
- At The Pool TSM RedDocument4 pagesAt The Pool TSM RedSarah StevensNo ratings yet
- Scheme - I Sample Question Paper: Program Name: Diploma in Plastic EngineeringDocument4 pagesScheme - I Sample Question Paper: Program Name: Diploma in Plastic EngineeringAmit GhadeNo ratings yet
- Allama Iqbal Open University, Islamabad (Assignment#2)Document12 pagesAllama Iqbal Open University, Islamabad (Assignment#2)ahsanNo ratings yet
- Nordex N60: Long-Term Experience All Over The WorldDocument8 pagesNordex N60: Long-Term Experience All Over The WorldHung NGUYENNo ratings yet
- HSE L141 - 2005 - Whole-Body VibrationDocument56 pagesHSE L141 - 2005 - Whole-Body VibrationKris WilochNo ratings yet
- Running Man LandmarkDocument4 pagesRunning Man LandmarkTanisha BiaspalNo ratings yet
- Nervous KeyDocument10 pagesNervous KeyAngel Natty NewNo ratings yet
- A History of Unit Stabilization: Colonel John R. Brinkerhoff, U.S. Army, RetiredDocument10 pagesA History of Unit Stabilization: Colonel John R. Brinkerhoff, U.S. Army, RetiredRockMechNo ratings yet
- PosterDocument1 pagePosterayushNo ratings yet
- marketing strategy of fastrackDocument85 pagesmarketing strategy of fastrackAnam FatimaNo ratings yet
- Itc Narmada: Stakeholder AnalysisDocument9 pagesItc Narmada: Stakeholder AnalysisSanjana MeghwaniNo ratings yet
- Object TrackingDocument23 pagesObject TrackingRahul PaulNo ratings yet
- Enterprise Resources Planning (ERP) 2610002Document2 pagesEnterprise Resources Planning (ERP) 2610002Virendra Arekar100% (1)
- Lesson 1 M2Document6 pagesLesson 1 M2Ede ShingNo ratings yet