You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Muhammad Al-BadriDocument14 pagesMuhammad Al-BadriMn AnaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Saleh Mohammed: Date of Birth Gender Marital Status Driving LicenseDocument2 pagesSaleh Mohammed: Date of Birth Gender Marital Status Driving LicenseMn AnaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
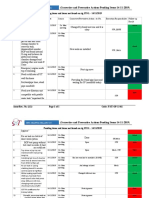
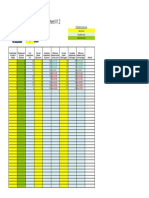
- Corrective and Preventive Actions Pending Items 14-11-2019Document4 pagesCorrective and Preventive Actions Pending Items 14-11-2019Mn AnaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A. Kommy UnitDocument13 pagesA. Kommy UnitMn AnaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Co Man AuditDocument2 pagesCo Man AuditMn AnaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Dy DX F (X+y) XF (XDocument3 pagesDy DX F (X+y) XF (XMn AnaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- FDocument5 pagesFMn AnaNo ratings yet
- MatDocument10 pagesMatMn AnaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Section 2. Calculation Formula.: Drilling - English Metric (Constant 10.2) Formula SheetDocument4 pagesSection 2. Calculation Formula.: Drilling - English Metric (Constant 10.2) Formula SheetMn AnaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 33 Trip SheetV1.2Document1 page33 Trip SheetV1.2Mn AnaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Referring To The Above Mentioned Subject, Kindly Find The Attached Hazards Hunt ReportDocument2 pagesReferring To The Above Mentioned Subject, Kindly Find The Attached Hazards Hunt ReportMn AnaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- الخلاصة 1 ثDocument14 pagesالخلاصة 1 ثMn AnaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- ةداملا مسا (Subject) ثحبلا ناونع (Research Title) Graphs and its importanceDocument18 pagesةداملا مسا (Subject) ثحبلا ناونع (Research Title) Graphs and its importanceMn AnaNo ratings yet
- Ghraph and Its ImportanceDocument19 pagesGhraph and Its ImportanceMn AnaNo ratings yet
- GATE Mathematics VaniDocument388 pagesGATE Mathematics VaniSanthos Kumar50% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- De La Salle University - Civil Engineering Department - Course DescriptionDocument16 pagesDe La Salle University - Civil Engineering Department - Course DescriptionSqueak DollphinNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- GATE - 2010 Syllabus: MA-Mathematics PaperDocument3 pagesGATE - 2010 Syllabus: MA-Mathematics PaperArPaN09121987No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Mechatronics SyllabusDocument142 pagesMechatronics SyllabustejassidhpuraNo ratings yet
- Matlab: Sharadindu AdhikariDocument9 pagesMatlab: Sharadindu AdhikariSharadindu AdhikariNo ratings yet
- Pauls Online Math NotesDocument5 pagesPauls Online Math NotesManoj BaishyaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Calculus and Differential Equations PDFDocument4 pagesCalculus and Differential Equations PDFHari RajanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- 22mat11 (2023-24) Module - 3 Partial DifferentiationDocument25 pages22mat11 (2023-24) Module - 3 Partial Differentiationzwq4rrkkq8No ratings yet
- Unit 1 Laplace TransformsDocument7 pagesUnit 1 Laplace TransformsCharan V ChanNo ratings yet
- Gate XeDocument3 pagesGate XeAbhinav MathurNo ratings yet
- Tutorial 4 FKB 11102Document2 pagesTutorial 4 FKB 11102Muhd ShazanyNo ratings yet
- U3-2 Method of Variation of ParametersDocument15 pagesU3-2 Method of Variation of ParametersR NishanNo ratings yet
- Engineering Mathematics: Dr. M. Sahadet Hossain (MTH) Associate Professor Department of Mathematics and Physics, NSUDocument17 pagesEngineering Mathematics: Dr. M. Sahadet Hossain (MTH) Associate Professor Department of Mathematics and Physics, NSUMd. Tanzim Hossain 1620776642No ratings yet
- Topic 14. Runge-Kutta MethodsDocument6 pagesTopic 14. Runge-Kutta Methodszzrot1No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Neta Calculus of VariaionSolnDocument107 pagesNeta Calculus of VariaionSolnsticker592No ratings yet
- Partial Differential Equations in Rectangular CoordinatesDocument5 pagesPartial Differential Equations in Rectangular CoordinatesSyed Beeban BashaNo ratings yet
- Herbert Kreyszig, Erwin Kreyszig - Student Solutions Manual and Study Guide To Advanced Engineering Mathematics (Volume 1) - Wiley (2012)Document256 pagesHerbert Kreyszig, Erwin Kreyszig - Student Solutions Manual and Study Guide To Advanced Engineering Mathematics (Volume 1) - Wiley (2012)يوسف سعد محمودNo ratings yet
- 5.4 Integration Trigonometric FunctionsDocument12 pages5.4 Integration Trigonometric Functionshariz syazwanNo ratings yet
- Exact EquationsDocument1 pageExact EquationsMariz Ellaine BaltazarNo ratings yet
- Engineering Mathematics 2 Jan 2014Document4 pagesEngineering Mathematics 2 Jan 2014Prasad C MNo ratings yet
- Chapter 3.3 - Formula - Laplace TransformDocument3 pagesChapter 3.3 - Formula - Laplace TransformEncik MaaNo ratings yet
- Math 304 Department MidtermDocument1 pageMath 304 Department MidtermMichael Gboneh0% (1)
- Basic Calculus FormulaeDocument4 pagesBasic Calculus FormulaeAkshay Singh RajputNo ratings yet
- Differential Equation - Formula Sheet - MathonGoDocument4 pagesDifferential Equation - Formula Sheet - MathonGoMamtaNo ratings yet
- ST STDocument9 pagesST STannantsharma027No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Differential Equations Complete Manual PDFDocument71 pagesDifferential Equations Complete Manual PDFJames Carl BelgaNo ratings yet
- Does God Play DiceDocument432 pagesDoes God Play DiceLukeNo ratings yet
- X G y X A DX Dy X A: A First-Order Differential Equation of The FormDocument8 pagesX G y X A DX Dy X A: A First-Order Differential Equation of The FormNurathirahNo ratings yet
- Ias Mathematics (Opt.) - 2014: Paper - I: SolutionsDocument46 pagesIas Mathematics (Opt.) - 2014: Paper - I: SolutionsPrakash Narayan SinghNo ratings yet
- Modeling of Atmospheric Wind Speed Sequence Using A Lognormal Continuous Stochastic EquationDocument12 pagesModeling of Atmospheric Wind Speed Sequence Using A Lognormal Continuous Stochastic Equationufu_santosNo ratings yet