You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Modern Indian Baby Girl Names With MeaningsDocument57 pagesModern Indian Baby Girl Names With MeaningsDinesh Rajan D100% (1)
- A Robotic System-Robot ComponentsDocument124 pagesA Robotic System-Robot ComponentsSidharth Suresh KumarNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Caterpillar Cat 311C Excavator (Prefix CKE) Service Repair Manual (CKE00001 and Up)Document28 pagesCaterpillar Cat 311C Excavator (Prefix CKE) Service Repair Manual (CKE00001 and Up)kfm8seuudu100% (1)
- Major Components of Industrial RobotsDocument8 pagesMajor Components of Industrial Robotsharikiran3285No ratings yet
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
- Intro To Eddy CurrentDocument2 pagesIntro To Eddy Currentrgopi_83No ratings yet
- Tesla CaseDocument21 pagesTesla CaseSandra Marcela GiraldoNo ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- New Holland W110/110TC Wheel Loader Specs and FeaturesDocument10 pagesNew Holland W110/110TC Wheel Loader Specs and FeaturesJamal HabbasNo ratings yet
- Robotics, Industrial Robotics, Question BankDocument13 pagesRobotics, Industrial Robotics, Question Banksiraj100% (5)
- DYNALI h3 HELICOPTER Flight ManualDocument106 pagesDYNALI h3 HELICOPTER Flight ManualGourav DasNo ratings yet
- Robots in WeldingDocument12 pagesRobots in WeldingRehan SharmaNo ratings yet
- Microcontroller Based Robotic ArmDocument5 pagesMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- rOBOTICS NOTESDocument14 pagesrOBOTICS NOTESdsathiya100% (4)
- Diesel Generator 450KW Spec SheetDocument7 pagesDiesel Generator 450KW Spec SheetMohamed Abd ElazizNo ratings yet
- Special Electrical Machines: Reluctance, Vernier & Stepping MotorsDocument5 pagesSpecial Electrical Machines: Reluctance, Vernier & Stepping MotorsEswaran0% (1)
- IV Year 2 Marks 16 Marks MechDocument108 pagesIV Year 2 Marks 16 Marks Mechjagadeeshwar vasudevanNo ratings yet
- Robotics - 2 MarksDocument10 pagesRobotics - 2 MarksVijayNo ratings yet
- ME6010 - Robotics Drive Systems and End EffectorsDocument7 pagesME6010 - Robotics Drive Systems and End EffectorsveerapandianNo ratings yet
- Introduction To Robotics 1 2 Marks Questions & AnswersDocument3 pagesIntroduction To Robotics 1 2 Marks Questions & AnswersSeshaiah TurakaNo ratings yet
- S7beme22a9 RoboticsDocument38 pagesS7beme22a9 Robotics976593274No ratings yet
- Robotics 2markDocument14 pagesRobotics 2markisirajudeen17No ratings yet
- Unit I Basic Concepts Two MarksDocument11 pagesUnit I Basic Concepts Two MarkstamilanNo ratings yet
- Robotics and Automation - Question Bank EC6003Document18 pagesRobotics and Automation - Question Bank EC6003jaiganeshNo ratings yet
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEmaverickhydronNo ratings yet
- Final Suggestion 014056Document11 pagesFinal Suggestion 014056TohidulNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- ECOM Unit1-5-1Document19 pagesECOM Unit1-5-1SHAIK ROSHANNo ratings yet
- Part A Ans Key 1,2,4Document3 pagesPart A Ans Key 1,2,4VenkadeshNo ratings yet
- Optimization of PID Control For High Speed Line Tracking RobotsDocument8 pagesOptimization of PID Control For High Speed Line Tracking RobotsPiero RaurauNo ratings yet
- Assignment On Servo Motor: January 2018Document4 pagesAssignment On Servo Motor: January 2018Simagn BekeleNo ratings yet
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEMansi PatelNo ratings yet
- Robotics QuestionsDocument3 pagesRobotics Questionsneerajbhayal3456No ratings yet
- Iar QPDocument13 pagesIar QPYuvraaj SinghNo ratings yet
- VMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationDocument16 pagesVMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationGaurav MullickNo ratings yet
- Robot Control Using PID ControllerDocument19 pagesRobot Control Using PID ControllerdfkoejfiNo ratings yet
- Robotics UNIT-I Two Marks With AnswersDocument3 pagesRobotics UNIT-I Two Marks With AnswersAnonymous ZB6qyhD6No ratings yet
- FALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IDocument37 pagesFALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IYashNo ratings yet
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- Electrical Drives and ControlDocument13 pagesElectrical Drives and ControlUΠIQUΣ TΔMILNo ratings yet
- Unit 2Document33 pagesUnit 2kssrao13No ratings yet
- Energy and System Lab Part IDocument28 pagesEnergy and System Lab Part IAhmed MohamedNo ratings yet
- Automatic Floor Cleaning Robot Using EncoderDocument4 pagesAutomatic Floor Cleaning Robot Using EncoderEditor IJTSRDNo ratings yet
- Automated Logistic Robotics Process SystemDocument57 pagesAutomated Logistic Robotics Process SystemMOHAMMED ALI MOHAMMED ZABBANINo ratings yet
- Summer Internship ProposalDocument6 pagesSummer Internship ProposalDipender SinghNo ratings yet
- Ch1 Introduction, Joints, ConfigurationsDocument12 pagesCh1 Introduction, Joints, ConfigurationsMelkamu SimenehNo ratings yet
- Robotech Labs: Research: Innovation: Development: ConsultancyDocument9 pagesRobotech Labs: Research: Innovation: Development: ConsultancytechvickyNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDocument69 pagesUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Robotic ArmDocument23 pagesRobotic ArmJapnam SodhiNo ratings yet
- Sensorless Speed Control of BLDC Using Geno-Fuzzy ControllerDocument36 pagesSensorless Speed Control of BLDC Using Geno-Fuzzy ControllerMahmoudTahaNo ratings yet
- Bluetooth Controlled Arduino Robotic Arm JournalDocument6 pagesBluetooth Controlled Arduino Robotic Arm JournalKarneshwar SannamaniNo ratings yet
- Robotics Chapter 1Document11 pagesRobotics Chapter 1origafelixNo ratings yet
- Unit-I Basic Concepts Part A Questions (2 Marks)Document5 pagesUnit-I Basic Concepts Part A Questions (2 Marks)Selvasundar KumarNo ratings yet
- 1) What Is The Meaning of A Control System?: Input Controller Plant OutputDocument8 pages1) What Is The Meaning of A Control System?: Input Controller Plant OutputRajath UpadhyaNo ratings yet
- Fundamentals of RobotsDocument46 pagesFundamentals of RobotsElvis OmondiNo ratings yet
- PC Controlled Wireless Robot Project ReportDocument30 pagesPC Controlled Wireless Robot Project ReportHemantYadavNo ratings yet
- Nota RobotDocument26 pagesNota RobotpnroslindaNo ratings yet
- Guidelines For Preparation of The ManuscriptDocument18 pagesGuidelines For Preparation of The Manuscriptvishal kumar mehtaNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- Answer Key It-2 CseDocument9 pagesAnswer Key It-2 CseVenkadeshNo ratings yet
- 8 Mission MappingDocument21 pages8 Mission Mappingankit407No ratings yet
- Swarm DocumentationDocument43 pagesSwarm DocumentationManishaNo ratings yet
- Chapter 1 - FundamentalsDocument28 pagesChapter 1 - FundamentalsHayleysus ShmelashNo ratings yet
- B+ Tree: by Li Wen CS157B Professor: Sin-Min LeeDocument26 pagesB+ Tree: by Li Wen CS157B Professor: Sin-Min Leergopi_83No ratings yet
- Robot Drive Systems: Key Concepts To Help You Choose Motors, Wheels and GearboxesDocument24 pagesRobot Drive Systems: Key Concepts To Help You Choose Motors, Wheels and Gearboxesrgopi_83No ratings yet
- ROBOTIC ENGINEERING An Integrated ApproachDocument1 pageROBOTIC ENGINEERING An Integrated Approachrgopi_83100% (1)
- Pneumatic Components CatapultDocument8 pagesPneumatic Components CatapultnidhidarklordNo ratings yet
- VEC Question Bank on Manufacturing Technology 1Document13 pagesVEC Question Bank on Manufacturing Technology 1rgopi_83No ratings yet
- 13th Finance Commission ReportDocument2 pages13th Finance Commission Reportpooja9999No ratings yet
- CogenDocument37 pagesCogenrgopi_83No ratings yet
- Lect 01Document24 pagesLect 01rgopi_83No ratings yet
- Compiler Design SlidesDocument33 pagesCompiler Design Slidesrgopi_83No ratings yet
- SolventDocument4 pagesSolventrgopi_83No ratings yet
- Oil ShaleDocument13 pagesOil Shalergopi_83No ratings yet
- Step7 ConfigDocument7 pagesStep7 Configrgopi_83No ratings yet
- Writing The Effective Resume: The First Step Toward Landing Your Next JobDocument32 pagesWriting The Effective Resume: The First Step Toward Landing Your Next Jobrgopi_83No ratings yet
- DE CaseDocument22 pagesDE Casergopi_83No ratings yet
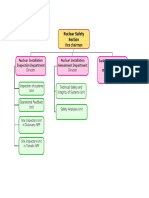
- Nuclear Safety Section Vice ChairmanDocument1 pageNuclear Safety Section Vice Chairmanrgopi_83No ratings yet
- Changes UgDocument2 pagesChanges Ugrgopi_83No ratings yet
- 2G Plan DetailsDocument1 page2G Plan Detailsrgopi_83No ratings yet
- ABCDocument8 pagesABCrgopi_83No ratings yet
- Te-I Viva QuestionsDocument2 pagesTe-I Viva QuestionsNitin JanagamNo ratings yet
- Faculty of Mechanical Engineering B.E. Mechanical Engineering (R 2013) Semester - IIIDocument12 pagesFaculty of Mechanical Engineering B.E. Mechanical Engineering (R 2013) Semester - IIIrgopi_83No ratings yet
- Unit 9 CRCDocument21 pagesUnit 9 CRCEr Manpreet ChahalNo ratings yet
- Manufacturing Technology1 (May2014)Document2 pagesManufacturing Technology1 (May2014)msloveindiaNo ratings yet
- Etd 2011Document2 pagesEtd 2011rgopi_83No ratings yet
- Combustion in Si EnginesDocument36 pagesCombustion in Si Enginesrgopi_83No ratings yet
- Step7 ConfigDocument7 pagesStep7 Configrgopi_83No ratings yet
- Data Acquisition With LabVIEWDocument22 pagesData Acquisition With LabVIEWliubingxyNo ratings yet
- Instructions To View/Downlad Ignou Study Material: 1. For RegistrationDocument1 pageInstructions To View/Downlad Ignou Study Material: 1. For Registrationrgopi_83No ratings yet
- Brief Information: Innovative and Highly Functional Surface DesignsDocument52 pagesBrief Information: Innovative and Highly Functional Surface DesignsSon NguyenNo ratings yet
- Electric Vehicle Charging Infrastructure: A Guide For Discom ReadinessDocument64 pagesElectric Vehicle Charging Infrastructure: A Guide For Discom ReadinessPixiNo ratings yet
- 制动鼓2023Document16 pages制动鼓2023DONG ZHANGNo ratings yet
- Fundamentals of Flame Spray For Reconditioning ComponentsDocument25 pagesFundamentals of Flame Spray For Reconditioning Componentsمیلاد باقرپورNo ratings yet
- CATALOGO Adaconn-Inserta Product Catalog 2010Document70 pagesCATALOGO Adaconn-Inserta Product Catalog 2010Eduardo Mata GamezNo ratings yet
- Design and Fabrication of Mechanical Lif PDFDocument5 pagesDesign and Fabrication of Mechanical Lif PDFJel SalcedoNo ratings yet
- Shop Logo Toyota Wish: Tokopedia Tokopedia TokopediaDocument1 pageShop Logo Toyota Wish: Tokopedia Tokopedia TokopediaFirmash HermawanNo ratings yet
- Donaldson Filters PDFDocument4 pagesDonaldson Filters PDFlingyuan168No ratings yet
- RSAFRAMEDocument2 pagesRSAFRAMETIOCA01No ratings yet
- Brand Vehicle Type Vehicle Model Vehicle Engine / Gear Type ECU Brand ECU Type Info Micro Info Eeprom R/W/VR Connection ModeDocument100 pagesBrand Vehicle Type Vehicle Model Vehicle Engine / Gear Type ECU Brand ECU Type Info Micro Info Eeprom R/W/VR Connection ModeEdgar Enrique Garcia RodriguezNo ratings yet
- Product Marketing Strategy for the New Katana Adventura 500 MotorcycleDocument5 pagesProduct Marketing Strategy for the New Katana Adventura 500 MotorcycleAyan ChakravartyNo ratings yet
- Capacities (Refill) : Operation and Maintenance ManualDocument2 pagesCapacities (Refill) : Operation and Maintenance ManualJuanVelasquezHerreraNo ratings yet
- " Automatic Air Suspension System ": A Seminar ReportDocument18 pages" Automatic Air Suspension System ": A Seminar ReportArpit SaxenaNo ratings yet
- Bahir Dar Polytechnic College Automotive Battery Functions and ImportanceDocument121 pagesBahir Dar Polytechnic College Automotive Battery Functions and ImportanceEyayaw YemataNo ratings yet
- r520lc 9s NewDocument10 pagesr520lc 9s Newkillsonicjhames.limaNo ratings yet
- Bridgestone Pattern Digest - 2021-2022Document75 pagesBridgestone Pattern Digest - 2021-2022Kyaw MinAungNo ratings yet
- About Ratan Tata and His Idea of HR Policies in TataDocument6 pagesAbout Ratan Tata and His Idea of HR Policies in TataAishu KrishnanNo ratings yet
- Heavy Attachment ToolsDocument62 pagesHeavy Attachment ToolsLuis JesusNo ratings yet
- Tesla Chargers ManualDocument61 pagesTesla Chargers ManualDsntNo ratings yet
- 9852 1007 01j Maintenance Instructions COP 1840,1840EXDocument32 pages9852 1007 01j Maintenance Instructions COP 1840,1840EXrolandNo ratings yet
- Prakash Kumar ResumeDocument2 pagesPrakash Kumar ResumePriyanka KediaNo ratings yet
- DTC Codes and Fault Paths for Diesel EnginesDocument36 pagesDTC Codes and Fault Paths for Diesel EnginesSidali KilardjNo ratings yet
- QUIZ Transportation EngineeringDocument2 pagesQUIZ Transportation EngineeringTherese Marie VillaroyaNo ratings yet
- D3e802f8707!1!9l Pumpe Duse Tdi Bew and BRMDocument24 pagesD3e802f8707!1!9l Pumpe Duse Tdi Bew and BRMJan HavelNo ratings yet
- Cummins AEB 24.20 Iss. 2015-06, Hoses and Connections (ID 239244)Document50 pagesCummins AEB 24.20 Iss. 2015-06, Hoses and Connections (ID 239244)Krzysztof OkrajekNo ratings yet