You might also like
- ใบความรู้1 5สังยุคและค่าสัมบูรณ์จำนวนเชิงซ้อนDocument6 pagesใบความรู้1 5สังยุคและค่าสัมบูรณ์จำนวนเชิงซ้อนKanyaphat TeaNo ratings yet
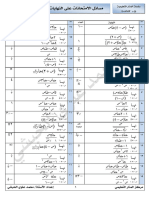
- مسائل امتحانات وزارية للنهاياتDocument4 pagesمسائل امتحانات وزارية للنهاياتhmaydymnayrNo ratings yet
- ชลDocument3 pagesชลกีฟละห์ อาเเวNo ratings yet
- 1. วงกลมหนึ่งหน่วย (unit circle) บทนิยาม 1 วงกลมหนึ่งหน่วย หมายถึง วงกลมที่มีจุดศูนย์กลางอยู่ที่จุดก2าเนิด (origin) และDocument11 pages1. วงกลมหนึ่งหน่วย (unit circle) บทนิยาม 1 วงกลมหนึ่งหน่วย หมายถึง วงกลมที่มีจุดศูนย์กลางอยู่ที่จุดก2าเนิด (origin) และAnonymous TjdOiVouNo ratings yet
- แบบฝึกหัดจำนวนเชิงซ้อนDocument19 pagesแบบฝึกหัดจำนวนเชิงซ้อนmrlog1No ratings yet
- เฉลย D.E. การแก้สมการเชิงอนุพันธ์โดยการแปลงแบบลาปลาซ web PDFDocument34 pagesเฉลย D.E. การแก้สมการเชิงอนุพันธ์โดยการแปลงแบบลาปลาซ web PDFSupakhit ChaichanaNo ratings yet
- เชิงซ้อนDocument8 pagesเชิงซ้อนBaiboon ChaiyaboonNo ratings yet
- ตารางลาปลาซDocument1 pageตารางลาปลาซเจษฎากร จันทวงษ์No ratings yet
- Exp 03 Deld LabDocument3 pagesExp 03 Deld LabAnmol MadanNo ratings yet
- TMO5SLDocument40 pagesTMO5SLวีรวัฒน์ พรเรืองทรัพย์No ratings yet
- Laplace TransformDocument16 pagesLaplace TransformSupakhit ChaichanaNo ratings yet
- ทวินามDocument6 pagesทวินามjutamas965No ratings yet
- ฟังก์ชันตรีโกณมิติDocument63 pagesฟังก์ชันตรีโกณมิติNAPASORN KNo ratings yet
- EconomicsDocument1 pageEconomicsChonticha PraeNo ratings yet
- 651210366Document1 page651210366ปาลิดา สว่างทวีวงศ์No ratings yet
- 22 ก.ค. 2021 21 - 26Document4 pages22 ก.ค. 2021 21 - 26zf4dbscd68No ratings yet
- HW1Document7 pagesHW1スカイ 木材No ratings yet
- เขียนกราฟพาราโบลาม 3มีโจทย์Document8 pagesเขียนกราฟพาราโบลาม 3มีโจทย์Prakai KruenetNo ratings yet
- 64 Practice w1Document7 pages64 Practice w1Korn PromkaewNo ratings yet
- กระดาษคำตอบDocument3 pagesกระดาษคำตอบNiramon SainoiNo ratings yet
- ทวนก่อนสอบ เลขยกกำลัง - the tutorDocument10 pagesทวนก่อนสอบ เลขยกกำลัง - the tutorFern NatkrittaNo ratings yet
- 07 6460501015 PDFDocument3 pages07 6460501015 PDFกีฟละห์ อาเเวNo ratings yet
- Fly Me To The Moon (New Version)Document3 pagesFly Me To The Moon (New Version)treetantant0081No ratings yet
- Near DawnDocument3 pagesNear DawnPeerawit AunruanNo ratings yet
- Fund ExamDocument4 pagesFund ExamMECHANICAL ENGINEERINGNo ratings yet
- Answer TEDET63 Math M1Document9 pagesAnswer TEDET63 Math M1Chokthawee RattanawetwongNo ratings yet
- บทที่ 8 การวิเคราะห์ระบบเวลาเต็มหน่วยในโดเมนความถี่Document58 pagesบทที่ 8 การวิเคราะห์ระบบเวลาเต็มหน่วยในโดเมนความถี่PKKNo ratings yet
- ข้อสอบเข้า ม.4 1Document6 pagesข้อสอบเข้า ม.4 1ครูณฑสัน ติวคณิตNo ratings yet
- MidtermDocument8 pagesMidterm65010630No ratings yet
- Chapter 2 - Determinant 2Document4 pagesChapter 2 - Determinant 2KORRAKOT KlinkaewnarongNo ratings yet
- ทบ ทวินาม ม.2 เพิ่มเติมDocument10 pagesทบ ทวินาม ม.2 เพิ่มเติมdiligent thailandNo ratings yet
- คอร์ดเพลง ใกล้ scrubb สครับ dochord.com กDocument1 pageคอร์ดเพลง ใกล้ scrubb สครับ dochord.com กuwithdangoNo ratings yet
- 36486Document1 page36486Songthai PiyachotsakunchaiNo ratings yet
- แบบประเมินผู้ดูแลเด็กDocument13 pagesแบบประเมินผู้ดูแลเด็กFai RuNo ratings yet
- เศษส่วนรูปทศนิยมDocument3 pagesเศษส่วนรูปทศนิยมDD123No ratings yet
- SPL HomogenDocument5 pagesSPL HomogenTedy TisarnaNo ratings yet
- สมุดโน้ตไม่มีชื่อDocument1 pageสมุดโน้ตไม่มีชื่อจตุพล จูมเกตุNo ratings yet
- 6 2 - เอกสารประกอบการเรียน 2565 2บทที่6 9Document24 pages6 2 - เอกสารประกอบการเรียน 2565 2บทที่6 936- วริษา อุทัยเภตรา Warisa UthaipetraNo ratings yet
- Homework 3Document3 pagesHomework 3Alonggot TiyasiwapronNo ratings yet
- 03 Methods of AnalysisDocument43 pages03 Methods of AnalysisQueen BNo ratings yet
- ใบงาน9Document6 pagesใบงาน9vhvkn6j8nrNo ratings yet
- 5.1 การแก้อสมการ แบบฝึกหัดDocument1 page5.1 การแก้อสมการ แบบฝึกหัดGbls LiverpoolNo ratings yet
- Chapter 6 Root-Locus Analysis - Part 1Document24 pagesChapter 6 Root-Locus Analysis - Part 1Narong NanthakusolNo ratings yet
- หลักภาษาและการใช้ภาษา ป.2 ชุดที่ 1Document11 pagesหลักภาษาและการใช้ภาษา ป.2 ชุดที่ 1Pam P.No ratings yet
- ฟิสิกส์อะตอมDocument32 pagesฟิสิกส์อะตอมRinlanee TameesakNo ratings yet
- Text Exponential - Final New PDFDocument95 pagesText Exponential - Final New PDFWicha WantzggNo ratings yet
- Test 1Document3 pagesTest 1Pattaraporn ThaisakornphunNo ratings yet
- 6409682033Document1 page6409682033bent74045No ratings yet
- ปรับพื้นฐานม.4 RealNum Power AbsoluteDocument37 pagesปรับพื้นฐานม.4 RealNum Power Absoluteสุรีย์พร เจ็ดกริชNo ratings yet
- Add m5 1 Chapter1Document50 pagesAdd m5 1 Chapter1น้องกาย นนท์ปวิธNo ratings yet
- Week 1Document6 pagesWeek 1Ball SarunNo ratings yet
- Screenshot 2564-09-01 at 14.12.42Document54 pagesScreenshot 2564-09-01 at 14.12.42navapat swangmeakNo ratings yet
- 28 ผลต่างของค่าเฉลี่ยDocument24 pages28 ผลต่างของค่าเฉลี่ยaekavitopas2902No ratings yet
- ปรับพื้นฐานม 4เรื่องระบบจำนวนจริงDocument21 pagesปรับพื้นฐานม 4เรื่องระบบจำนวนจริงPraew PuntiwaNo ratings yet
- 3 Trigon+statDocument31 pages3 Trigon+statSurachai StmNo ratings yet
- หลักภาษาและการใช้ภาษา ป.2 ชุดที่ 2Document11 pagesหลักภาษาและการใช้ภาษา ป.2 ชุดที่ 2Pam P.No ratings yet
- แบบฝึกหัดเรื่อง การวิเคราะห์ข้อสอบ1-66Document3 pagesแบบฝึกหัดเรื่อง การวิเคราะห์ข้อสอบ1-66isometimezz11No ratings yet
- สอบไฟนอลDocument9 pagesสอบไฟนอลTiwaNon KongkaewNo ratings yet
- 4.1. แบบฝึกหัดเพิ่มเติม Matrix (เมตริกซ์) ชุดที่ 1-3 PDFDocument6 pages4.1. แบบฝึกหัดเพิ่มเติม Matrix (เมตริกซ์) ชุดที่ 1-3 PDFWitchayut KnightNo ratings yet
- ข้อสอบกลางภาคต้น vibration 2560 - เฉลย PDFDocument7 pagesข้อสอบกลางภาคต้น vibration 2560 - เฉลย PDFSupakhit ChaichanaNo ratings yet
- ch10 Soln WebDocument4 pagesch10 Soln WebSupakhit ChaichanaNo ratings yet
- 52 - dissemin - ตำรา ผศ วิภพDocument302 pages52 - dissemin - ตำรา ผศ วิภพSupakhit ChaichanaNo ratings yet
- ch09 Soln WebDocument5 pagesch09 Soln WebSupakhit ChaichanaNo ratings yet
- ch08 Soln WebDocument5 pagesch08 Soln WebSupakhit ChaichanaNo ratings yet
- ข้อสอบปลายภาคต้น vibration 2560 - Solution PDFDocument7 pagesข้อสอบปลายภาคต้น vibration 2560 - Solution PDFSupakhit ChaichanaNo ratings yet
- ch11 Soln WebDocument7 pagesch11 Soln WebSupakhit ChaichanaNo ratings yet
- AFP2 MathModel 1479310418 PDFDocument62 pagesAFP2 MathModel 1479310418 PDFSupakhit ChaichanaNo ratings yet
- บทที่ 01 สภาพแวดล้อมของการประกอบธุรกิจDocument4 pagesบทที่ 01 สภาพแวดล้อมของการประกอบธุรกิจSupakhit ChaichanaNo ratings yet
- Case Study 703103Document13 pagesCase Study 703103Supakhit ChaichanaNo ratings yet
- VibrationModeling2Document40 pagesVibrationModeling2Supakhit ChaichanaNo ratings yet
- 703103 จริยธรรมทางธุรกิจ 2020 audio testingDocument18 pages703103 จริยธรรมทางธุรกิจ 2020 audio testingSupakhit ChaichanaNo ratings yet
- VibrationModeling1Document73 pagesVibrationModeling1Supakhit ChaichanaNo ratings yet
- คำถามเพื่อทบทวนเนื้อหาเรื่องการตลาด PDFDocument1 pageคำถามเพื่อทบทวนเนื้อหาเรื่องการตลาด PDFSupakhit ChaichanaNo ratings yet
- ลำดับของการพัฒนาทางการเกษตร120961Document55 pagesลำดับของการพัฒนาทางการเกษตร120961Supakhit ChaichanaNo ratings yet
- SCH 25621215231840Document2 pagesSCH 25621215231840Supakhit ChaichanaNo ratings yet
- AFP2 MathModel 1479310418 PDFDocument62 pagesAFP2 MathModel 1479310418 PDFSupakhit ChaichanaNo ratings yet
- 341 Lec 01Document57 pages341 Lec 01Supakhit ChaichanaNo ratings yet
- แบบฝึกหัด บทที่ 6 machineryDocument2 pagesแบบฝึกหัด บทที่ 6 machinerySupakhit ChaichanaNo ratings yet
- Examfinal 262Document17 pagesExamfinal 262Supakhit ChaichanaNo ratings yet
- คำถามเพื่อทบทวนเนื้อหาเรื่องการตลาดDocument1 pageคำถามเพื่อทบทวนเนื้อหาเรื่องการตลาดSupakhit ChaichanaNo ratings yet
- บทที่8Document31 pagesบทที่8Supakhit ChaichanaNo ratings yet
- Num1 47U5Document18 pagesNum1 47U5Supakhit ChaichanaNo ratings yet
- (MID) English4 in Science and Technology ContextDocument7 pages(MID) English4 in Science and Technology ContextChirayu TrongpunyachotNo ratings yet
- 312ch09 2555 2ndDocument19 pages312ch09 2555 2ndSupakhit ChaichanaNo ratings yet
- เฉลย D.E. การแก้สมการเชิงอนุพันธ์โดยการแปลงแบบลาปลาซ web PDFDocument34 pagesเฉลย D.E. การแก้สมการเชิงอนุพันธ์โดยการแปลงแบบลาปลาซ web PDFSupakhit ChaichanaNo ratings yet
- Laplace TransformDocument16 pagesLaplace TransformSupakhit ChaichanaNo ratings yet
- แบบฝึกหัด บทที่ 5 machineryDocument3 pagesแบบฝึกหัด บทที่ 5 machinerySupakhit ChaichanaNo ratings yet
- Fits and TolerancesDocument17 pagesFits and TolerancesPitiporn HasuankwanNo ratings yet