You might also like
- Applications of DMC-PID Algorithm in The Measurement and Control System For The Greenhouse Enviromental FactorsDocument3 pagesApplications of DMC-PID Algorithm in The Measurement and Control System For The Greenhouse Enviromental FactorsyopisukitaNo ratings yet
- ANN Based MARC Controller Design For An Industrial Chemical ProcessDocument8 pagesANN Based MARC Controller Design For An Industrial Chemical ProcessGlan DevadhasNo ratings yet
- Unit-2 Temperature ControlDocument4 pagesUnit-2 Temperature ControlSakthi PeriasamyNo ratings yet
- Intelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessDocument7 pagesIntelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessGlan DevadhasNo ratings yet
- Tuning PID controllers for nonlinear ball and beam systemDocument4 pagesTuning PID controllers for nonlinear ball and beam systemjamesNo ratings yet
- Chapter1 Has BeenDocument11 pagesChapter1 Has BeenOlanrewaju EmmanuelNo ratings yet
- 1 s2.0 S1474667016310667 MainDocument6 pages1 s2.0 S1474667016310667 MainSamir AhmedNo ratings yet
- Event-Based PI ControlDocument6 pagesEvent-Based PI ControlDr Razak Olusegun Alli-OkeNo ratings yet
- Temperature Control Water Bath System Using PID ControllerDocument5 pagesTemperature Control Water Bath System Using PID Controllerprapya pokharelNo ratings yet
- p311 PDFDocument9 pagesp311 PDFmohammad naseemNo ratings yet
- Hu 2023 J. Phys. Conf. Ser. 2503 012101Document11 pagesHu 2023 J. Phys. Conf. Ser. 2503 012101Amri MoussaNo ratings yet
- Sensing - Universal PID-Thermoregulator: Application Note AbstractDocument19 pagesSensing - Universal PID-Thermoregulator: Application Note Abstractnqdinh100% (2)
- KENDALI LEVEL AIR DENGAN PID CONTROLLERDocument15 pagesKENDALI LEVEL AIR DENGAN PID CONTROLLERAhmadi Nur IntanNo ratings yet
- Paper6 PDFDocument24 pagesPaper6 PDFMary Grace VelitarioNo ratings yet
- CNC Machine (Case Study) 1Document5 pagesCNC Machine (Case Study) 1Mohamed HamdyNo ratings yet
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- Controlling Heat Exchanger Temp with PID and Fuzzy LogicDocument5 pagesControlling Heat Exchanger Temp with PID and Fuzzy LogicEric DiazNo ratings yet
- Adaptive FilterDocument7 pagesAdaptive FilterdhanalakshmiNo ratings yet
- Thermal Characteristics of Pid Controller Water HeaterDocument10 pagesThermal Characteristics of Pid Controller Water HeaterEhab QabashNo ratings yet
- amr.945 949.2559Document5 pagesamr.945 949.2559Huynh Trung HieuNo ratings yet
- Widya Sekar A - 194308038 - Laporan 2Document39 pagesWidya Sekar A - 194308038 - Laporan 2Agung KrisnaNo ratings yet
- Universidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoDocument6 pagesUniversidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoAndres LozanoNo ratings yet
- Fuzzy Logic Controller For Superheated SDocument4 pagesFuzzy Logic Controller For Superheated Smahendra ANo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Matlab PaperDocument8 pagesMatlab PapersusmarohiNo ratings yet
- Paper 1Document8 pagesPaper 1AmmarALJodahNo ratings yet
- Nazaruddin2008 PDFDocument4 pagesNazaruddin2008 PDFelva RfNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- College of Engineering and TechnologyDocument27 pagesCollege of Engineering and TechnologyAbdeta TerfaNo ratings yet
- Pid Control: Thermofit: Author: Mackenzie Andrews Group Members: Kim HuaDocument20 pagesPid Control: Thermofit: Author: Mackenzie Andrews Group Members: Kim Huaapi-272723910No ratings yet
- PID TUNING TECHNIQUES COMPAREDDocument3 pagesPID TUNING TECHNIQUES COMPAREDSathiya SeelanNo ratings yet
- Adaptive PID Control for CSTH Temperature ProcessDocument8 pagesAdaptive PID Control for CSTH Temperature ProcesssanthoshramrNo ratings yet
- PID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsDocument5 pagesPID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsbijejournalNo ratings yet
- A Fuzzy Logic Based PI Autotuner - 1998 - ISA TransactionsDocument9 pagesA Fuzzy Logic Based PI Autotuner - 1998 - ISA TransactionsLeandroSantanaNo ratings yet
- Instrumentation & Process ControlDocument6 pagesInstrumentation & Process ControlAnonymous 0zrCNQNo ratings yet
- Report 2 (PID)Document5 pagesReport 2 (PID)Araragi KoyomiNo ratings yet
- The Research On The Parameter Tuning Method of An Analytic Type Fuzzy Integral Hybrid ControllerDocument6 pagesThe Research On The Parameter Tuning Method of An Analytic Type Fuzzy Integral Hybrid ControllerDavid StuartNo ratings yet
- IPC-week-1-19022024-113005amDocument45 pagesIPC-week-1-19022024-113005amfatmanasir284No ratings yet
- Cascaded PID Controller Design For Heating Furnace Temperature ControlDocument8 pagesCascaded PID Controller Design For Heating Furnace Temperature ControlInternational Organization of Scientific Research (IOSR)No ratings yet
- Bytronic SistemDocument6 pagesBytronic SistemSedat IriçNo ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- Easychair Preprint: Mohamad Syafiq Azwan Mohd NorDocument5 pagesEasychair Preprint: Mohamad Syafiq Azwan Mohd NorJaime VargasNo ratings yet
- PI-Like Fuzzy Logic Controller Design for Power System StabilizerDocument4 pagesPI-Like Fuzzy Logic Controller Design for Power System StabilizerJace FamNo ratings yet
- PBL Synopsis FormatDocument10 pagesPBL Synopsis Formatshankar zadgeNo ratings yet
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocument6 pagesOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNo ratings yet
- PID Control of Heat Exchanger SystemDocument7 pagesPID Control of Heat Exchanger SystemHaris IhsannurNo ratings yet
- Feedback Control TheoryDocument16 pagesFeedback Control TheorykelvinNo ratings yet
- Fuzzy Gain Scheduling of PID ControllersDocument1 pageFuzzy Gain Scheduling of PID ControllersRio Ananda PutraNo ratings yet
- ID Otomasi Sistem Destilasi Menggunakan PLCDocument6 pagesID Otomasi Sistem Destilasi Menggunakan PLCErwin PurbaNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- PID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhDocument5 pagesPID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhLê Trung DũngNo ratings yet
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 pagesNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNo ratings yet
- Results /findings Introduction/Literature Review: Measurement and Control of Thermal SystemDocument1 pageResults /findings Introduction/Literature Review: Measurement and Control of Thermal SystemJitbro PrajapatiNo ratings yet
- A Simple PID Controller With Adaptive Parameter in A DsPICDocument5 pagesA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifNo ratings yet
- Real Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VDocument13 pagesReal Time Application of Ants Colony Optimization: Dr.S.M.Girirajkumar Dr.K.Ramkumar Sanjay Sarma O.VKarthik BalajiNo ratings yet
- DA-PID DesignDocument6 pagesDA-PID Designjamal2877No ratings yet
- Diseño-Guia 6 (PID Controller)Document8 pagesDiseño-Guia 6 (PID Controller)RhinometalI&CNo ratings yet
- Approach Towards Standard Electromyography (EMG) Controlled Hand Prosthesis SystemDocument4 pagesApproach Towards Standard Electromyography (EMG) Controlled Hand Prosthesis SystemTiago GonçalvesNo ratings yet
- 412c2012-b0ab-4946-bde4-b6a263fb0922Document166 pages412c2012-b0ab-4946-bde4-b6a263fb0922Foxx chanelNo ratings yet
- 412c2012-b0ab-4946-bde4-b6a263fb0922Document166 pages412c2012-b0ab-4946-bde4-b6a263fb0922Foxx chanelNo ratings yet
- Electronics Engineering Preparatory Practice #2Document1 pageElectronics Engineering Preparatory Practice #2mario yanezNo ratings yet
- Universidad Politecnica Salesiana16 - 12 - 20Document5 pagesUniversidad Politecnica Salesiana16 - 12 - 20mario yanezNo ratings yet
- Universidad Politecnica Salesiana16 - 12 - 20Document5 pagesUniversidad Politecnica Salesiana16 - 12 - 20mario yanezNo ratings yet
- Temperarura4 PDFDocument371 pagesTemperarura4 PDFmario yanezNo ratings yet
- Auto Exam PDFDocument4 pagesAuto Exam PDFmario yanezNo ratings yet
- 412c2012-b0ab-4946-bde4-b6a263fb0922Document166 pages412c2012-b0ab-4946-bde4-b6a263fb0922Foxx chanelNo ratings yet
- Auto Exam PDFDocument4 pagesAuto Exam PDFmario yanezNo ratings yet
- Application of PID Controller in Controlling Refrigerator TemperatureDocument7 pagesApplication of PID Controller in Controlling Refrigerator Temperaturemario yanezNo ratings yet
- Comparison Between Optimally-Tuned PID With Self-Tuning PID For Steam Temperature RegulationDocument6 pagesComparison Between Optimally-Tuned PID With Self-Tuning PID For Steam Temperature Regulationmario yanezNo ratings yet
- Auto Exam PDFDocument4 pagesAuto Exam PDFmario yanezNo ratings yet
- Comparison Between Optimally-Tuned PID With Self-Tuning PID For Steam Temperature RegulationDocument6 pagesComparison Between Optimally-Tuned PID With Self-Tuning PID For Steam Temperature Regulationmario yanezNo ratings yet
- Tactile Display For Presenting Quality of Materials by Changing The Temperature of Skin SurfaceDocument5 pagesTactile Display For Presenting Quality of Materials by Changing The Temperature of Skin Surfacemario yanezNo ratings yet
- Tactile Display For Presenting Quality of Materials by Changing The Temperature of Skin SurfaceDocument5 pagesTactile Display For Presenting Quality of Materials by Changing The Temperature of Skin Surfacemario yanezNo ratings yet
- Application of PID Controller in Controlling Refrigerator TemperatureDocument7 pagesApplication of PID Controller in Controlling Refrigerator Temperaturemario yanezNo ratings yet
- Contador DescendenteDocument2 pagesContador Descendentemario yanezNo ratings yet
- Document 09-Apr, 2019 658 PMDocument3 pagesDocument 09-Apr, 2019 658 PMmario yanezNo ratings yet
- StarterNotebook - Jupyter NotebookDocument12 pagesStarterNotebook - Jupyter NotebookTosin GeorgeNo ratings yet
- Chapter 1: The Roots of Artificial Intelligence Diego RodríguezDocument2 pagesChapter 1: The Roots of Artificial Intelligence Diego RodríguezInmaculada RodriguezNo ratings yet
- PythonDocument3 pagesPythonJ.G N.HNo ratings yet
- Deep Learning With Keras::: Cheat SheetDocument2 pagesDeep Learning With Keras::: Cheat SheetMinh NguyễnNo ratings yet
- Binder 1Document8 pagesBinder 1Devilman_2No ratings yet
- PSO OPTIMIZES RASTRIGINDocument3 pagesPSO OPTIMIZES RASTRIGINFilipe DuarteNo ratings yet
- 2.3.1 The McCulloch-Pitts Model of NeuronDocument2 pages2.3.1 The McCulloch-Pitts Model of NeuronsegnumutraNo ratings yet
- Machine Learning With Python Programming: - Presentation by Uplatz - Contact Us: - Email: - PhoneDocument22 pagesMachine Learning With Python Programming: - Presentation by Uplatz - Contact Us: - Email: - PhonesdbfhvsdfhvsdhvdsNo ratings yet
- CCW331 Business Analytics Material Unit I Type2Document43 pagesCCW331 Business Analytics Material Unit I Type2ultra BNo ratings yet
- Artificial Intelligence: Agents and EnvironmentDocument27 pagesArtificial Intelligence: Agents and EnvironmentHashim Omar AbukarNo ratings yet
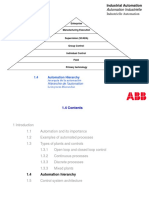
- ABB DCS 140 - HierarchyDocument16 pagesABB DCS 140 - HierarchyMatthewNo ratings yet
- Sanjeev Sharma CVDocument2 pagesSanjeev Sharma CVGabriel Reid100% (1)
- Bagging and Boosting: Amit Srinet Dave SnyderDocument33 pagesBagging and Boosting: Amit Srinet Dave Snyderisaias.prestesNo ratings yet
- USM EEE 350 Control Systems Exam QuestionsDocument16 pagesUSM EEE 350 Control Systems Exam QuestionsNur AfiqahNo ratings yet
- Implementation of SLAM On Mobile Robots and Stitching of The Generated MapsDocument13 pagesImplementation of SLAM On Mobile Robots and Stitching of The Generated MapsTay LinNo ratings yet
- Efficiency Improvement in Classification Tasks Using Naive Bayes PDFDocument5 pagesEfficiency Improvement in Classification Tasks Using Naive Bayes PDFiaetsdiaetsdNo ratings yet
- Ball Mill Control (Compatibility Mode)Document31 pagesBall Mill Control (Compatibility Mode)Nael100% (1)
- Resume Abdelghani BenazzouzDocument4 pagesResume Abdelghani Benazzouzbenazzouzabdelghani2No ratings yet
- Region-Based Deep Learning Method (Mask R-CNN)Document18 pagesRegion-Based Deep Learning Method (Mask R-CNN)Sal Saad Al Deen TaherNo ratings yet
- Drivergym: Democratising Reinforcement Learning For Autonomous DrivingDocument8 pagesDrivergym: Democratising Reinforcement Learning For Autonomous DrivingshoaibazaNo ratings yet
- What NARX Networks Can ComputeDocument8 pagesWhat NARX Networks Can Computecristian_masterNo ratings yet
- Mock Exam M4Document11 pagesMock Exam M4Sudheer Kumar ReddyNo ratings yet
- ch10 Sequence Modelling - Recurrent and Recursive NetsDocument45 pagesch10 Sequence Modelling - Recurrent and Recursive Nets黃良初No ratings yet
- Soft Computing Applications: Dr. Debasis SamantaDocument16 pagesSoft Computing Applications: Dr. Debasis SamantaEr Farzan UllahNo ratings yet
- Speech Emotion Recognition Using MFCC and SVMDocument21 pagesSpeech Emotion Recognition Using MFCC and SVMTRIAD TECHNO SERVICES100% (1)
- Jussi Parikka The Spam Book PDFDocument291 pagesJussi Parikka The Spam Book PDFCanek ZapataNo ratings yet
- Department of Computer Science, University of Kashmir Presentation For PHD AdmissionDocument9 pagesDepartment of Computer Science, University of Kashmir Presentation For PHD Admissionrather AarifNo ratings yet
- Back Stepping - Wikipedia, The Free EncyclopediaDocument9 pagesBack Stepping - Wikipedia, The Free EncyclopediaMario RossiNo ratings yet
- Geng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceDocument9 pagesGeng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceangelosoutiNo ratings yet