You might also like
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Ch7 Symmetrical FaultsDocument37 pagesCh7 Symmetrical FaultsAlamgir KhanNo ratings yet
- Understanding Transients: Conceptual Interpretation: Ieee On Vol. No. 2, 521Document6 pagesUnderstanding Transients: Conceptual Interpretation: Ieee On Vol. No. 2, 521xernoxianNo ratings yet
- Calculation of Short Circuit Current: e (T) L Di + Ri (T) 2.1Document12 pagesCalculation of Short Circuit Current: e (T) L Di + Ri (T) 2.1October EchoNo ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- A Review On Memristor Applications: Roberto Marani, Gennaro Gelao and Anna Gina PerriDocument12 pagesA Review On Memristor Applications: Roberto Marani, Gennaro Gelao and Anna Gina PerritejabbuNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- Electrical-Engineering Engineering Power-Electronics Inverters NotesDocument22 pagesElectrical-Engineering Engineering Power-Electronics Inverters NotesAbdelrahman Magdy EbrahimNo ratings yet
- T P E I T: Esting and Erformance Valuation of Nstrument RansformersDocument15 pagesT P E I T: Esting and Erformance Valuation of Nstrument RansformersAnimesh JainNo ratings yet
- EE 1352 Monograph UnitIIIDocument24 pagesEE 1352 Monograph UnitIIIafzalbaigsaNo ratings yet
- Chapter 3: Capacitors, Inductors, and Complex Impedance: I. AC Voltages and CircuitsDocument14 pagesChapter 3: Capacitors, Inductors, and Complex Impedance: I. AC Voltages and CircuitsramjiNo ratings yet
- Unit 4 Symmetrical FaultsDocument18 pagesUnit 4 Symmetrical FaultsjayababNo ratings yet
- TransientDocument8 pagesTransientQuazi Mosaddequl HaqueNo ratings yet
- CT - Residual CT - Effect of HarmonicDocument4 pagesCT - Residual CT - Effect of HarmonicSandeep PartiNo ratings yet
- Modeling and Control Design of A Static Synchronous Series CompensatorDocument6 pagesModeling and Control Design of A Static Synchronous Series Compensatorsteffy ruizNo ratings yet
- Alternator Short CircuitDocument2 pagesAlternator Short CircuitAnirban MandalNo ratings yet
- Emtp PDFDocument34 pagesEmtp PDFagkacdm1163100% (1)
- Differential Difference Current Conveyor (DDCC) Based Schmitt Trigger Circuit & Its ApplicationDocument4 pagesDifferential Difference Current Conveyor (DDCC) Based Schmitt Trigger Circuit & Its ApplicationEditor IJRITCCNo ratings yet
- Power Electronic Module - Chapter 2Document43 pagesPower Electronic Module - Chapter 2jayxcellNo ratings yet
- Module-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeDocument22 pagesModule-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- EDC MaterialDocument49 pagesEDC Materialhard.worker123hwNo ratings yet
- Triac 400v 15aDocument14 pagesTriac 400v 15aVG1975No ratings yet
- 4a. SMTransientAnalysisDocument7 pages4a. SMTransientAnalysisAnondo SarbabidyaNo ratings yet
- Leakage Reactance - PaperDocument24 pagesLeakage Reactance - PaperRodrigo Javier RomayNo ratings yet
- Starting Performance of Synchronous Motors: WindingsDocument11 pagesStarting Performance of Synchronous Motors: WindingsguestNo ratings yet
- Rectifying CircuitsDocument13 pagesRectifying Circuitssina981No ratings yet
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungNo ratings yet
- Unit 3Document100 pagesUnit 3Mukesh 2004No ratings yet
- A New Macro-Model For Power Diodes Reverse Recovery PDFDocument5 pagesA New Macro-Model For Power Diodes Reverse Recovery PDFElectricEngineeringNo ratings yet
- Electrodynamometer-Type Wattmeter: 1. Fixed Coil SystemDocument21 pagesElectrodynamometer-Type Wattmeter: 1. Fixed Coil SystemJebas ManovaNo ratings yet
- Appendix Chapter For Transformer StandardDocument28 pagesAppendix Chapter For Transformer StandardHabib SimorangkirNo ratings yet
- Short Circuit CalculationsDocument13 pagesShort Circuit CalculationsAmr EidNo ratings yet
- Transient Harmonic Analysis of TransformerDocument70 pagesTransient Harmonic Analysis of TransformerAchmad SetiawanNo ratings yet
- Circuit Breaker Performance Analysis PDFDocument10 pagesCircuit Breaker Performance Analysis PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Calculation of Short Circuit CurrentsDocument5 pagesCalculation of Short Circuit Currentssk_rajNo ratings yet
- Class de Inverters and Rectifiers For DC-DC ConversiondDocument8 pagesClass de Inverters and Rectifiers For DC-DC ConversiondRon HuangNo ratings yet
- Diode Circuits or Uncontrolled Rectifier: EE 435-Electric Drives Dr. Ali M. EltamalyDocument21 pagesDiode Circuits or Uncontrolled Rectifier: EE 435-Electric Drives Dr. Ali M. EltamalyNaga Surya PrakashNo ratings yet
- Inrush Phenomena in TransformerDocument49 pagesInrush Phenomena in TransformerLingaraj PatraNo ratings yet
- Improved Modification of The Single-Switch AC-AC Converter For Induction Heating ApplicationsDocument4 pagesImproved Modification of The Single-Switch AC-AC Converter For Induction Heating Applicationsvenkatesaneee2009gmaNo ratings yet
- A New Push Pull Zero Voltage Switching Quasi Resonant Converter-Topology and ExperDocument5 pagesA New Push Pull Zero Voltage Switching Quasi Resonant Converter-Topology and ExperSucheta Chatterjee SethiNo ratings yet
- Rectifiers CASWarrington2004Document51 pagesRectifiers CASWarrington2004Pradeepan PoothattaNo ratings yet
- Symmetrical Faults PDFDocument27 pagesSymmetrical Faults PDFHassan LalaNo ratings yet
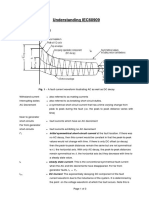
- Understanding IEC 60909Document3 pagesUnderstanding IEC 60909Mauricio Toro CasallasNo ratings yet
- Power Electronic Module - Chapter 3Document34 pagesPower Electronic Module - Chapter 3jayxcellNo ratings yet
- CH2Document55 pagesCH2Shantha KumarNo ratings yet
- M.g.say ch01Document5 pagesM.g.say ch01prabhjot singh150% (2)
- Chapter Two: Line or Naturally Commutated ConvertersDocument32 pagesChapter Two: Line or Naturally Commutated ConvertersMichael Adu-boahenNo ratings yet
- A Simplified Analysis and Design of The Rectifier With Capacitive FilterDocument8 pagesA Simplified Analysis and Design of The Rectifier With Capacitive Filterilet09No ratings yet
- Thyristor ChopperDocument6 pagesThyristor ChopperMitul ChaudhariNo ratings yet
- LLC 0.9V: Resonant Converter For 48V ToDocument7 pagesLLC 0.9V: Resonant Converter For 48V Tohoàng tônNo ratings yet
- Transients in R-L Circuits: Fault AnalysisDocument5 pagesTransients in R-L Circuits: Fault AnalysisOkwalNo ratings yet
- Current Transformer Requirements of MiCOM RelaysDocument48 pagesCurrent Transformer Requirements of MiCOM RelaysMallikarjun Reddy50% (2)
- Calculating Characteristics of The Flyback Converter With The Use of Averaged ModelsDocument4 pagesCalculating Characteristics of The Flyback Converter With The Use of Averaged Modelsarturp1975No ratings yet
- AC NotesDocument22 pagesAC Notesviharipavan100% (1)
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- EC - Unit 1 - Power SupplyDocument17 pagesEC - Unit 1 - Power Supplynanobala15No ratings yet
- Module 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsDocument55 pagesModule 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsFabricioNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Transmission Lines: OlutionDocument15 pagesTransmission Lines: Olutionbansalr100% (1)
- Introduction To Power System StructureDocument20 pagesIntroduction To Power System StructureDara HengNo ratings yet
- Electrical Symbols PDFDocument31 pagesElectrical Symbols PDFpanyamnr80% (5)
- Preface and Acknowledgements Preface To 2nd Edition Xi: ° ° ° XillDocument6 pagesPreface and Acknowledgements Preface To 2nd Edition Xi: ° ° ° XillDara HengNo ratings yet
- IndxDocument4 pagesIndxJorge A. Perez YebraNo ratings yet
- Industrial Plant Load Shedding: Rio D-FDocument12 pagesIndustrial Plant Load Shedding: Rio D-FJorge A. Perez YebraNo ratings yet
- 10 PDFDocument13 pages10 PDFDara HengNo ratings yet
- Experiment 2: Tripping Characteristics of Fuse & MCBDocument17 pagesExperiment 2: Tripping Characteristics of Fuse & MCBDara HengNo ratings yet
- GeneralDocument9 pagesGeneralMohamed BelallNo ratings yet
- Physics G10 Unpacked CompetenciesDocument8 pagesPhysics G10 Unpacked CompetenciesBik BokNo ratings yet
- Review Questions Single Phase Circuits - v2 TestDocument4 pagesReview Questions Single Phase Circuits - v2 TestSri NisshaNo ratings yet
- Aperture-Shared Radiation Surface A Promising Technique For Multifunctional Antenna Array DevelopmentDocument20 pagesAperture-Shared Radiation Surface A Promising Technique For Multifunctional Antenna Array DevelopmentpikothemanNo ratings yet
- Subject Code: EE-221 Full Marks: 30 Time: 24 HRS.: End-Semester ExaminationDocument4 pagesSubject Code: EE-221 Full Marks: 30 Time: 24 HRS.: End-Semester Examinationhajarilal meenaNo ratings yet
- Punto Unico TierraDocument4 pagesPunto Unico TierraarielaparicioNo ratings yet
- Current Controlled Hysteresis Brakes: Transmitting Torque Through AirDocument7 pagesCurrent Controlled Hysteresis Brakes: Transmitting Torque Through AirRavishankarNo ratings yet
- Units & DimensionsDocument9 pagesUnits & DimensionsCHAPPA CHAKRAVARTHYNo ratings yet
- Wireless Channel: Dr. Manjunatha. PDocument25 pagesWireless Channel: Dr. Manjunatha. PRAPETI SAI KUMAR (N160490)No ratings yet
- Effect of Field Change, Synchronous Condenser, Starting MethodsDocument30 pagesEffect of Field Change, Synchronous Condenser, Starting Methodsmalik karim dadNo ratings yet
- Physics RevisionDocument157 pagesPhysics RevisionQuang Phat TrinhNo ratings yet
- EMC PlanDocument28 pagesEMC Planyadvikram7No ratings yet
- IEEE Recommended Practice For Testing Insulation ResistanceDocument1 pageIEEE Recommended Practice For Testing Insulation Resistancealvin meNo ratings yet
- E5822 1 1 08 16 - Luftkuehler - Zubehoer - EinzelDocument18 pagesE5822 1 1 08 16 - Luftkuehler - Zubehoer - EinzelAkash Rock0% (1)
- BS Iso Cie 10526-1991 (1999) PDFDocument20 pagesBS Iso Cie 10526-1991 (1999) PDFAmqc AlmumtazNo ratings yet
- User Manual Controller MAM 200Document16 pagesUser Manual Controller MAM 200Air Logic100% (1)
- Inductor - Vitec PN 53PR105-722 - 20121106Document2 pagesInductor - Vitec PN 53PR105-722 - 20121106senayan pltdNo ratings yet
- Topic 2a - Spectroscopy and SpectrometerDocument19 pagesTopic 2a - Spectroscopy and SpectrometerLoh JiayeeNo ratings yet
- Pressure Measurement: Pressure Sensor For General Air and Gas Applications - Stainless Steel CTX-#.#.#.###.#Document6 pagesPressure Measurement: Pressure Sensor For General Air and Gas Applications - Stainless Steel CTX-#.#.#.###.#Henry DavichoNo ratings yet
- 2023 Ec Physc Gr12 p1 QPDocument19 pages2023 Ec Physc Gr12 p1 QPTriple M Guider NephaweNo ratings yet
- Torchlight (Flashlight) Ub24D: SpecificationsDocument1 pageTorchlight (Flashlight) Ub24D: SpecificationsPandu BirumakovelaNo ratings yet
- Simplex Sync Clock Wired Movement InstructionsDocument16 pagesSimplex Sync Clock Wired Movement InstructionsAceNo ratings yet
- O22934v83 HAMM Compaction Meter en PDFDocument2 pagesO22934v83 HAMM Compaction Meter en PDFHewa PCNo ratings yet
- Section 4 Transmission LinesDocument105 pagesSection 4 Transmission LinesAhmedNo ratings yet
- Radioactivity and Nuclear TransformaionDocument4 pagesRadioactivity and Nuclear TransformaionAthira I PNo ratings yet
- GeneralCatalog E 2017-2018 L PDFDocument88 pagesGeneralCatalog E 2017-2018 L PDFMaulana Ayahnya FarhanaNo ratings yet
- Technical Data: Toshiba X-Ray Tube D-041 D-041S D-041SBDocument10 pagesTechnical Data: Toshiba X-Ray Tube D-041 D-041S D-041SBKamilNo ratings yet
- Multipath Propagation PDFDocument18 pagesMultipath Propagation PDFBIRENDRA BHARDWAJNo ratings yet
- UNIT-2 Basic Electrical EngineeringDocument26 pagesUNIT-2 Basic Electrical Engineeringabhi shekNo ratings yet
- Types of Antenna - BARON - EE179Document6 pagesTypes of Antenna - BARON - EE179Rosendo J. BaronNo ratings yet
- Info Iec60947-3 (Ed4.0) BDocument23 pagesInfo Iec60947-3 (Ed4.0) Babouadnane imaneNo ratings yet