You might also like
- BASIC ELECTRICAL ENGINEERING MCQs PDFDocument14 pagesBASIC ELECTRICAL ENGINEERING MCQs PDFchitti poluri100% (2)
- SVT GreskeDocument17 pagesSVT GreskePeter100% (6)
- Modu SoftDocument2 pagesModu Softhabibulla100% (1)
- Service Tool Manual 311 411 413Document86 pagesService Tool Manual 311 411 413Ayra Elevator perkasaNo ratings yet
- Otis Software Basic Data PDFDocument23 pagesOtis Software Basic Data PDFReynold Suarez100% (1)
- C U H Máy Kéo Sigma OtisDocument45 pagesC U H Máy Kéo Sigma OtisQuang Pham DuyNo ratings yet
- MCS220-MCS120 parameters-GAA30082DAC InsDocument43 pagesMCS220-MCS120 parameters-GAA30082DAC InsCoil98No ratings yet
- MAN - Woodward Basic Electronic Speed GovernorsDocument38 pagesMAN - Woodward Basic Electronic Speed Governorskailash_singh_7100% (2)
- How To Calculate AC Choke For Mains Supply and DC Choke For DC BusDocument2 pagesHow To Calculate AC Choke For Mains Supply and DC Choke For DC BusNanda KumarNo ratings yet
- EMC Filter Design With RB Common Mode ChokesDocument22 pagesEMC Filter Design With RB Common Mode Chokeskaem1189No ratings yet
- GAA 24350 AW11 IVa PDFDocument31 pagesGAA 24350 AW11 IVa PDFEvgeniyNo ratings yet
- OTIS LCB II Basic Parameter PDFDocument28 pagesOTIS LCB II Basic Parameter PDFhabibulla100% (1)
- Fundamental of Electricity and MagnetismDocument18 pagesFundamental of Electricity and MagnetismVedant KamlaskarNo ratings yet
- OTIS (Instruction Manual For TOMCB Converter Board)Document26 pagesOTIS (Instruction Manual For TOMCB Converter Board)Ariel LeonNo ratings yet
- List of Installation Parameters: Software Basic Data Mcs - LCB - IiDocument43 pagesList of Installation Parameters: Software Basic Data Mcs - LCB - IiBartz SantosNo ratings yet
- VF-DRIVE-rope-units GAA622AA CSU FD 001Document16 pagesVF-DRIVE-rope-units GAA622AA CSU FD 001Coil98No ratings yet
- FSD GAA30782GAA Feature and Set Up Description - 2014-05-23 - PDFDocument183 pagesFSD GAA30782GAA Feature and Set Up Description - 2014-05-23 - PDFQuang Pham Duy100% (1)
- AC Choke CalculationDocument2 pagesAC Choke CalculationSri VarshiniNo ratings yet
- Restoration Notes From A Radiola 60Document15 pagesRestoration Notes From A Radiola 60sms56180100% (1)
- UT ID 22.17.1 3 Otis Glide A Electrical Setup and Startup ManualDocument68 pagesUT ID 22.17.1 3 Otis Glide A Electrical Setup and Startup ManualFahadNo ratings yet
- RCBII RSL Parameters - 4767764251226047386845665916 PDFDocument67 pagesRCBII RSL Parameters - 4767764251226047386845665916 PDFBartz Santos0% (1)
- Dbss - HSDD - Service Handling: Field Component ManualDocument11 pagesDbss - HSDD - Service Handling: Field Component ManualМихаил100% (1)
- Dbss - HSDD - Service Handling: Field Component ManualDocument11 pagesDbss - HSDD - Service Handling: Field Component ManualМихаил100% (1)
- Manual of GAA21750AK3 Elevator Service Tool: WWW - Escalatorparts.cnDocument70 pagesManual of GAA21750AK3 Elevator Service Tool: WWW - Escalatorparts.cnDio ChanNo ratings yet
- Characteristics - Igtf Landing ArrangementDocument56 pagesCharacteristics - Igtf Landing ArrangementMAYESTON100% (1)
- FIM Pulse™ Start-Up: P ™ CSB MDocument13 pagesFIM Pulse™ Start-Up: P ™ CSB MAN Nhiên100% (3)
- GCS 222 MRL System Start Up GCS 222 MRL - 2012-07-03Document69 pagesGCS 222 MRL System Start Up GCS 222 MRL - 2012-07-03djidjelli nassir50% (2)
- Start Up Routine OVF10 PDFDocument12 pagesStart Up Routine OVF10 PDFEng M ElseaidyNo ratings yet
- Ovf 20 (MCB Ii) Service Tool Manual205760498Document49 pagesOvf 20 (MCB Ii) Service Tool Manual205760498Ace Noah Somintac83% (6)
- Adjusting The E311MV E411MV LMCSS Ward-Leonard Modernization ControllerDocument19 pagesAdjusting The E311MV E411MV LMCSS Ward-Leonard Modernization ControllerSamuel Acevedo100% (1)
- Gba 26800 H II StartupDocument15 pagesGba 26800 H II StartupPeter100% (4)
- OH-CON4423 Adjust Training ManualDocument49 pagesOH-CON4423 Adjust Training ManualJuanmanuel Barroyeta100% (4)
- Xaa610bb GL enDocument24 pagesXaa610bb GL enchalogdNo ratings yet
- Controllers Elevonic SeriesDocument58 pagesControllers Elevonic SeriesSamuel Acevedo100% (1)
- Lift Monitoring & Diagnostics: SystemDocument53 pagesLift Monitoring & Diagnostics: SystemMohd Abu AjajNo ratings yet
- Crane SWF 5 Ton Manual Book PDFDocument28 pagesCrane SWF 5 Ton Manual Book PDFAnggit0% (1)
- 799all (GECB) (001-173) PDFDocument173 pages799all (GECB) (001-173) PDFtu_negro_luis100% (5)
- Customer Spec Abs6 Stand Prem Y486R10202Document95 pagesCustomer Spec Abs6 Stand Prem Y486R10202Branko AndricNo ratings yet
- Acd4 MRLDocument66 pagesAcd4 MRLRafael BrunoNo ratings yet
- FSD GAA30780EAN Feature and Set Up Description - 2015!05!28Document196 pagesFSD GAA30780EAN Feature and Set Up Description - 2015!05!28Nebyu GetachewNo ratings yet
- GBA 26800 H IV OVF 20 Service - ToolDocument31 pagesGBA 26800 H IV OVF 20 Service - ToolPeter80% (15)
- Otis Gecb LV Fallas y Soluciones InglesDocument74 pagesOtis Gecb LV Fallas y Soluciones Inglesjohnny gmail100% (6)
- Ovf20cro AdtDocument49 pagesOvf20cro AdtAriel Ariel83% (6)
- Ovf20cro AdtDocument49 pagesOvf20cro AdtAriel Ariel83% (6)
- Ovf20cro AdtDocument49 pagesOvf20cro AdtAriel Ariel83% (6)
- Jhs182 Ais InstructionDocument116 pagesJhs182 Ais InstructionMorseunitedNo ratings yet
- Permanent-magnetism Frequency-conversion Door Operator User's GuideDocument38 pagesPermanent-magnetism Frequency-conversion Door Operator User's GuideAN NhiênNo ratings yet
- LBII ParametrosDocument37 pagesLBII ParametrosPolinho Donacimento100% (1)
- Field Construction Manual Annex 11 Manual Learning Mode Using Test ToolDocument2 pagesField Construction Manual Annex 11 Manual Learning Mode Using Test ToolprasadNo ratings yet
- (PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17Document17 pages(PDF) BD Advands Diagnostic and Trouble Shooting GECB-LV - 2013!06!17boneyNo ratings yet
- Parameter List MCS - RCB2Document34 pagesParameter List MCS - RCB2FazilNo ratings yet
- Service Tool Reference List: Field Component ManualDocument11 pagesService Tool Reference List: Field Component ManualRobert Aguilar100% (3)
- 715-000-000 Sematic 2000 C-MOD - Edition 6 April 2010Document55 pages715-000-000 Sematic 2000 C-MOD - Edition 6 April 2010МихаилNo ratings yet
- Schneider-Altivar-ATV61-Installation-Manual VDF ATV61 SCHENIDERDocument77 pagesSchneider-Altivar-ATV61-Installation-Manual VDF ATV61 SCHENIDERNestor Diaz R.No ratings yet
- E411VF Reference BookDocument61 pagesE411VF Reference BookAyra Elevator perkasa100% (1)
- MCS120 220 Error Ref - GAA30082DAC - RefDocument21 pagesMCS120 220 Error Ref - GAA30082DAC - RefCoil98No ratings yet
- Start Up Routine: Field Component ManualDocument12 pagesStart Up Routine: Field Component Manualihwisso100% (5)
- Service Manual Minarctig Evo 200: Kemppi OyDocument27 pagesService Manual Minarctig Evo 200: Kemppi OyLucyan IonescuNo ratings yet
- Ovf 20CR.1Document8 pagesOvf 20CR.1jahinme100% (1)
- Otis GeN2 Switch Gecb At120 Variador LV Diagramas TAA21310TDocument25 pagesOtis GeN2 Switch Gecb At120 Variador LV Diagramas TAA21310Tlucas100% (2)
- Suppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterDocument7 pagesSuppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterFaissal RachmanNo ratings yet
- THYSSENKRUPP ElevatorDocument3 pagesTHYSSENKRUPP Elevatorhamid taher50% (2)
- SPMDCBDocument24 pagesSPMDCBSyed iliyas100% (3)
- Star-Up Lbii BD Component Start Up Gaa30163aaf - 2007!10!11Document17 pagesStar-Up Lbii BD Component Start Up Gaa30163aaf - 2007!10!11Polinho DonacimentoNo ratings yet
- Otis SigmaDocument56 pagesOtis SigmaSERIMER SAS100% (1)
- Elevator Troubleshooting & Repair: A Technician's Certification Study GuideFrom EverandElevator Troubleshooting & Repair: A Technician's Certification Study GuideRating: 4 out of 5 stars4/5 (9)
- Mcs - LCB Ii, TCB, HCB, TCBC Gcs - Gecb: Service Tool ManualDocument64 pagesMcs - LCB Ii, TCB, HCB, TCBC Gcs - Gecb: Service Tool ManualAlexis MauricioNo ratings yet
- Hybrid Amplifier by Andrea CiuffoliDocument24 pagesHybrid Amplifier by Andrea CiuffoliimrefodorNo ratings yet
- Spec 112 PDFDocument36 pagesSpec 112 PDFMayank JoshiNo ratings yet
- MCS - LCB Ii, TCB, HCB, TCBCDocument77 pagesMCS - LCB Ii, TCB, HCB, TCBCHabboula MouradNo ratings yet
- Inversor Moeller DF4Document95 pagesInversor Moeller DF4Flavio CasimiroNo ratings yet
- FIM Micro Instructions MOI GCS 222 MMR - 2006-10-27Document1 pageFIM Micro Instructions MOI GCS 222 MMR - 2006-10-27МихаилNo ratings yet
- GL DCDSDocument28 pagesGL DCDSNour BenNo ratings yet
- HD 6/16-4 M / MX HD 7/18-4 M / MX HD 9/19 M / MX HD 9/20-4 M / MX Service ManualDocument32 pagesHD 6/16-4 M / MX HD 7/18-4 M / MX HD 9/19 M / MX HD 9/20-4 M / MX Service Manualali83No ratings yet
- SMC 5100-XX-IT Toxic Gas Detector ManualDocument64 pagesSMC 5100-XX-IT Toxic Gas Detector Manualjocp1988No ratings yet
- CCB - IIDocument135 pagesCCB - IIPraveen KumarNo ratings yet
- P3 MkIII Auto Manifold Type 2R O&M Manual Rev 7Document25 pagesP3 MkIII Auto Manifold Type 2R O&M Manual Rev 7anfalapNo ratings yet
- 7907 Ela80-3000 Rev - 7 PDFDocument54 pages7907 Ela80-3000 Rev - 7 PDFDavid デビッドブエノ BuenoNo ratings yet
- Dbss - HSDD Field Component ManualDocument4 pagesDbss - HSDD Field Component ManualМихаил100% (1)
- FIM Micro Instructions WIR GCS 222 MMR - 2006-10-27Document1 pageFIM Micro Instructions WIR GCS 222 MMR - 2006-10-27Михаил100% (1)
- FIM Micro Instructions LOTO GCS 222 MMR - 2006-10-27Document1 pageFIM Micro Instructions LOTO GCS 222 MMR - 2006-10-27МихаилNo ratings yet
- GLS 126 NTDocument2 pagesGLS 126 NTМихаилNo ratings yet
- GLS 126 NTDocument2 pagesGLS 126 NTМихаилNo ratings yet
- Eaton VP Versa Pac Inductors Transformers Data SheetDocument9 pagesEaton VP Versa Pac Inductors Transformers Data SheetfirdNo ratings yet
- Power Design With Ferrite Cores 2021Document9 pagesPower Design With Ferrite Cores 2021juanNo ratings yet
- Product CatalogueDocument20 pagesProduct CatalogueGirish IyerNo ratings yet
- Design of EMI Filters For DC-DC ConverterDocument6 pagesDesign of EMI Filters For DC-DC ConverterPABLO MAURONo ratings yet
- CA995 (6) ManualDocument49 pagesCA995 (6) Manualdosser McNo ratings yet
- Altivar 32Document35 pagesAltivar 32Mihai ConstantinescuNo ratings yet
- Wireless DoorbellDocument8 pagesWireless DoorbellnicklingatongNo ratings yet
- Kirchhoff's Laws, Ohm's Law, AC and DC Circuits ExplainedDocument6 pagesKirchhoff's Laws, Ohm's Law, AC and DC Circuits ExplainedSatyam KumarNo ratings yet
- Schneider Altivar 21Document65 pagesSchneider Altivar 21fcruz12No ratings yet
- Ferrite Ferroxcube APPNOTE PDFDocument0 pagesFerrite Ferroxcube APPNOTE PDFwizardgrtNo ratings yet
- Mark 9000 PDFDocument24 pagesMark 9000 PDFw.h.nNo ratings yet
- ElectronicsLectures GinGrichDocument176 pagesElectronicsLectures GinGrichfasolăiNo ratings yet
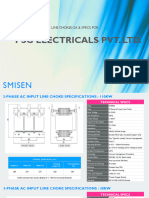
- Smisen Specs SCPL - 23-24 - SPC - PEPL - LR - 01Document3 pagesSmisen Specs SCPL - 23-24 - SPC - PEPL - LR - 01Glen CarterNo ratings yet
- AC circuit analysis documentDocument8 pagesAC circuit analysis documentB AbhinavNo ratings yet
- ASOC Exam Sample Question Paper 2Document19 pagesASOC Exam Sample Question Paper 2pratham29786No ratings yet
- TH42PZ700BDocument42 pagesTH42PZ700BNicolas PicardNo ratings yet
- Alignment Procedure SummaryDocument66 pagesAlignment Procedure SummaryAndrei Constantin0% (1)
- General technical documentation for Schneider Electric ATV71 variable speed driveDocument13 pagesGeneral technical documentation for Schneider Electric ATV71 variable speed driveSahata HasibuanNo ratings yet