You might also like
- Dumitriu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1018 012001Document10 pagesDumitriu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1018 012001DanteNo ratings yet
- Optimal Kinematic Design of A 2-DOF Planar Parallel ManipulatorDocument7 pagesOptimal Kinematic Design of A 2-DOF Planar Parallel Manipulatorinventor_bkNo ratings yet
- Analysis of Unbalanced Magnetic Pull in A Multi-Physic Model of Induction Machine With An Eccentric RotorDocument9 pagesAnalysis of Unbalanced Magnetic Pull in A Multi-Physic Model of Induction Machine With An Eccentric Rotor9096664279No ratings yet
- WCE2012 pp1716-1721 PDFDocument6 pagesWCE2012 pp1716-1721 PDFEuge CompagnoniNo ratings yet
- 65 IFIT2020 KinematicSynthesisOfATendon-DrDocument9 pages65 IFIT2020 KinematicSynthesisOfATendon-Drdanu jaya saputroNo ratings yet
- An Innovative Electric Ship Steering Systems: Analysis and ImplementationDocument10 pagesAn Innovative Electric Ship Steering Systems: Analysis and ImplementationTJPRC PublicationsNo ratings yet
- Pattesh Technical ReportDocument22 pagesPattesh Technical ReportAakarsh DeepNo ratings yet
- 15 2505 Design Report0203 99 103Document5 pages15 2505 Design Report0203 99 103Kurnia WanNo ratings yet
- Installation of Gussets To Reduce Stress On The JuDocument7 pagesInstallation of Gussets To Reduce Stress On The JuBhawesh SthaNo ratings yet
- Asma TounsiDocument13 pagesAsma TounsiHAFEDH ABIDNo ratings yet
- Assessment of SSI On The Longitudinal Seismic Response of Short Span BridgesDocument7 pagesAssessment of SSI On The Longitudinal Seismic Response of Short Span Bridgesakshay12489No ratings yet
- Active Stability Control Strategies For A High Speed BogieDocument11 pagesActive Stability Control Strategies For A High Speed BogienpfhNo ratings yet
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranNo ratings yet
- Ijciet 06 09 017 PDFDocument16 pagesIjciet 06 09 017 PDFIAEME PublicationNo ratings yet
- Solar Energy Contribution To An Electric Vehicle Needs On The Basis of Long-Term MeasurementsDocument9 pagesSolar Energy Contribution To An Electric Vehicle Needs On The Basis of Long-Term MeasurementsPraveen Kumar MetriNo ratings yet
- Differential-Drive Mobile Robot Control Design BasDocument8 pagesDifferential-Drive Mobile Robot Control Design Basmaria graça dias portas automáticas ldaNo ratings yet
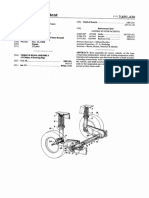
- Us 3601426 RearDocument4 pagesUs 3601426 Rearanup tiwariNo ratings yet
- EN 1998-1 National Annex Greece Par 4.2.3.2.Document5 pagesEN 1998-1 National Annex Greece Par 4.2.3.2.EfessosNo ratings yet
- The Stability Analysis of Two-Wheeled Vehicle ModelDocument10 pagesThe Stability Analysis of Two-Wheeled Vehicle ModelGogyNo ratings yet
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterNo ratings yet
- Mechanism and Machine Theory: Roland Mathis, Yves RemondDocument13 pagesMechanism and Machine Theory: Roland Mathis, Yves RemondStefan IlicNo ratings yet
- Arsene Sebesan Vol 7 Iss 2 PDFDocument7 pagesArsene Sebesan Vol 7 Iss 2 PDFSorinNo ratings yet
- Experimental and Numerical Analysis of A Composite Bridge For High-Speed TrainsDocument20 pagesExperimental and Numerical Analysis of A Composite Bridge For High-Speed TrainsYONAS GOSANo ratings yet
- Design and Development of Wheel Balancing Machine Experimental Setup IJERTV8IS060197Document5 pagesDesign and Development of Wheel Balancing Machine Experimental Setup IJERTV8IS060197Abdul KurniadiNo ratings yet
- Design and Development of A Stewart Platform Based Force Torque SensorDocument17 pagesDesign and Development of A Stewart Platform Based Force Torque SensorCigifarmNo ratings yet
- Design and Analysis of Multi-Angular Gearless Transmission SystemDocument9 pagesDesign and Analysis of Multi-Angular Gearless Transmission SystemShrikkNo ratings yet
- Design and Development of A Pendulum Type Dynamic Vibration Absorber For A Sdof Vibrating System Subjected To Base ExcitationDocument15 pagesDesign and Development of A Pendulum Type Dynamic Vibration Absorber For A Sdof Vibrating System Subjected To Base ExcitationIAEME PublicationNo ratings yet
- Modeling A Repair Machining of A Rotary Kiln TireDocument7 pagesModeling A Repair Machining of A Rotary Kiln TireAmran WiratmaNo ratings yet
- Motion Control of Segway Vehicle Using PID Backstepping Control MethodDocument6 pagesMotion Control of Segway Vehicle Using PID Backstepping Control MethodChetanraj D PatilNo ratings yet
- Mathematical Modeling of Dynamic Induction Motor With Bearing FaultDocument5 pagesMathematical Modeling of Dynamic Induction Motor With Bearing FaultTawhid Bin TarekNo ratings yet
- CE527-FN - RQMNTS-MOJOJOJO-GaetosKristan, PrimeroJoshua, UgaldeBerleiDocument36 pagesCE527-FN - RQMNTS-MOJOJOJO-GaetosKristan, PrimeroJoshua, UgaldeBerleiKristan Rae GaetosNo ratings yet
- The Investigation of Stability of Wheeled Vehicle Model in Curved Sections of OverpassDocument8 pagesThe Investigation of Stability of Wheeled Vehicle Model in Curved Sections of OverpassGogyNo ratings yet
- A Novel Mathematical Model For Flexure Bearings Applied in Primary Torque Standard MachinesDocument8 pagesA Novel Mathematical Model For Flexure Bearings Applied in Primary Torque Standard MachinesBenilton OliveiraNo ratings yet
- 13 55 PDFDocument9 pages13 55 PDFtrungceNo ratings yet
- Automatic Determination of PID Controlle PDFDocument20 pagesAutomatic Determination of PID Controlle PDFJosafa AstroNo ratings yet
- Detection of Bearing Fault in 3 PHASE INDUCTION MOTOR USING WAVELETDocument8 pagesDetection of Bearing Fault in 3 PHASE INDUCTION MOTOR USING WAVELETamrpalaNo ratings yet
- Design of ShaftDocument5 pagesDesign of ShaftAnonymous oTrMzaNo ratings yet
- Design of Shaft PDFDocument5 pagesDesign of Shaft PDFAnonymous oTrMzaNo ratings yet
- Ijert Ijert: Jacobian Analysis of Limited DOF Parallel Manipulator Using Wrench and Reciprocal Screw PrincipleDocument5 pagesIjert Ijert: Jacobian Analysis of Limited DOF Parallel Manipulator Using Wrench and Reciprocal Screw PrincipleTanNguyễnNo ratings yet
- V6i3 1423Document6 pagesV6i3 1423Julius RojoNo ratings yet
- Roll Angle Estimation in Two-Wheeled VehiclesDocument13 pagesRoll Angle Estimation in Two-Wheeled VehiclesTruong Van HoatNo ratings yet
- DmitriLurie MQP Report Version05312012 PDFDocument18 pagesDmitriLurie MQP Report Version05312012 PDFJewel AquinoNo ratings yet
- Singularity Analysis of A Parallel Manipulator With Cylindrical JointsDocument5 pagesSingularity Analysis of A Parallel Manipulator With Cylindrical Jointsyash523No ratings yet
- Arsene Sebesan Vol 7 Iss 1 PDFDocument10 pagesArsene Sebesan Vol 7 Iss 1 PDFSorinNo ratings yet
- Design of Half-Car Active Suspension System For Passenger Riding ComfortDocument7 pagesDesign of Half-Car Active Suspension System For Passenger Riding ComfortPankaj SharmaNo ratings yet
- EUCOMES 027 GonzalezCruzDocument10 pagesEUCOMES 027 GonzalezCruzEduardo DelfinoNo ratings yet
- Computing Experiment For Unloading Dumper Truck at A Sloping PadDocument8 pagesComputing Experiment For Unloading Dumper Truck at A Sloping PadLong ThànhNo ratings yet
- Analysis of Straight and Skewed Box Girder Bridge by Finite Strip MethodDocument8 pagesAnalysis of Straight and Skewed Box Girder Bridge by Finite Strip MethodBharat SharmaNo ratings yet
- Investigation of Wire Diameter of Helical CompressionDocument10 pagesInvestigation of Wire Diameter of Helical CompressionPrihastya WishnutamaNo ratings yet
- Static Analysis of Tractor Trolley AxleDocument5 pagesStatic Analysis of Tractor Trolley AxleseventhsensegroupNo ratings yet
- Analisis Kelayakan Skema KPBU Pada Penyelenggaraan Kereta Api Parangtritis - Bandara Yogyakarta International Airport PDFDocument10 pagesAnalisis Kelayakan Skema KPBU Pada Penyelenggaraan Kereta Api Parangtritis - Bandara Yogyakarta International Airport PDFNur Budi SusantoNo ratings yet
- Coaxial Multiplier For Wind TurbineDocument4 pagesCoaxial Multiplier For Wind Turbinebitconcepts9781No ratings yet
- Selection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceDocument15 pagesSelection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceIAES International Journal of Robotics and AutomationNo ratings yet
- A Complete Modeling and Control For Wind Turbine Based of A Doubly Fed Induction Generator Using Direct Power ControlDocument9 pagesA Complete Modeling and Control For Wind Turbine Based of A Doubly Fed Induction Generator Using Direct Power ControlKheira BelgacemNo ratings yet
- Dumitriu 2018 IOP Conf. Ser. Mater. Sci. Eng. 400 042020 PDFDocument10 pagesDumitriu 2018 IOP Conf. Ser. Mater. Sci. Eng. 400 042020 PDFFabiano OliveiraNo ratings yet
- Exoskeleton Simulation in WorkingModelDocument7 pagesExoskeleton Simulation in WorkingModelMatei DanNo ratings yet
- Sliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionDocument13 pagesSliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionelecnaimelecNo ratings yet
- Compressed Air Propulsion System to Power the Car of the FutureFrom EverandCompressed Air Propulsion System to Power the Car of the FutureNo ratings yet
- Coupling 2Document19 pagesCoupling 2tushar9810080No ratings yet
- Minimum Required InterferenceDocument4 pagesMinimum Required InterferenceParag NaikNo ratings yet
- STR 01 2018Document26 pagesSTR 01 2018JigneshNo ratings yet
- Materials in Centrifugal Compressor and Steam Turbines: Selection, Processing, and RepairDocument8 pagesMaterials in Centrifugal Compressor and Steam Turbines: Selection, Processing, and RepairJigneshNo ratings yet
- MSI Centrifugal Impeller Structural Resonance PDFDocument9 pagesMSI Centrifugal Impeller Structural Resonance PDFJigneshNo ratings yet
- 0701038Document13 pages0701038nimireshNo ratings yet
- Victaulic Couplings Vibration Attenuation CharacteristicsDocument5 pagesVictaulic Couplings Vibration Attenuation CharacteristicsJigneshNo ratings yet
- 10 5923 J Mechanics 20120202 03 PDFDocument4 pages10 5923 J Mechanics 20120202 03 PDFJigneshNo ratings yet
- Sil Poxy Silicone AdhesiveDocument1 pageSil Poxy Silicone Adhesiveflv_91No ratings yet
- 20377-Basic of Bolting Seminar at Tata Steel, KPO PDFDocument1 page20377-Basic of Bolting Seminar at Tata Steel, KPO PDFJigneshNo ratings yet
- Introduction To The Theory of PlatesDocument41 pagesIntroduction To The Theory of PlatesAndrés MercadoNo ratings yet
- PARKER - Oring HandBookDocument96 pagesPARKER - Oring HandBookLuis AparcanaNo ratings yet
- 20377-Basic of Bolting Seminar at Tata Steel, KPO PDFDocument1 page20377-Basic of Bolting Seminar at Tata Steel, KPO PDFJigneshNo ratings yet
- Optimisation of Screw CompressorsDocument29 pagesOptimisation of Screw CompressorsJignesh100% (1)
- Fastener BasicsDocument2 pagesFastener BasicsDigvijay Singh IINo ratings yet
- Torque Data ChartDocument2 pagesTorque Data ChartAscenderBSP100% (1)
- Balancing of ShaftsDocument21 pagesBalancing of ShaftsMuralitclNo ratings yet
- Fastener FactsDocument6 pagesFastener FactsJigneshNo ratings yet
- General Universal Joint Characteristics and Applications From SDP - SIDocument9 pagesGeneral Universal Joint Characteristics and Applications From SDP - SIJigneshNo ratings yet
- Esab VordianDocument1 pageEsab VordianGokul RajanNo ratings yet
- Voith NivelakselitDocument88 pagesVoith NivelakselitJigneshNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Fatigue FailureDocument4 pagesFatigue FailurebennyfergusonNo ratings yet
- Handbook Mechanical Shaft Design PDFDocument9 pagesHandbook Mechanical Shaft Design PDFJigneshNo ratings yet
- Pinnacle Alloys E6013Document2 pagesPinnacle Alloys E6013rahulNo ratings yet
- Handbook Mechanical Shaft Design PDFDocument9 pagesHandbook Mechanical Shaft Design PDFJigneshNo ratings yet
- Ijaerv13n20 05Document7 pagesIjaerv13n20 05JigneshNo ratings yet
- Valve Material Selection GuideDocument15 pagesValve Material Selection GuideAhmad Fadhil ReviansyahNo ratings yet
- Abstracts BMS 2016Document6 pagesAbstracts BMS 2016JigneshNo ratings yet
- A Narrative Comprehensive Report of Student Teaching ExperiencesDocument82 pagesA Narrative Comprehensive Report of Student Teaching ExperiencesEpal Carlo74% (23)
- Machine Design Key 2014Document15 pagesMachine Design Key 2014SouvikDasNo ratings yet
- Functional Plant Manager 2. Geographical Vice PresidentDocument5 pagesFunctional Plant Manager 2. Geographical Vice PresidentVic FranciscoNo ratings yet
- Mat210 LectureNotes 1Document7 pagesMat210 LectureNotes 1Franch Maverick Arellano LorillaNo ratings yet
- Understanding EarsDocument1 pageUnderstanding EarsmerkyworksNo ratings yet
- Certified Vendors As of 6 17 22Document18 pagesCertified Vendors As of 6 17 22Harry ConnerNo ratings yet
- Lecture - 1 - UNDERGROUND MINE DESIGNDocument59 pagesLecture - 1 - UNDERGROUND MINE DESIGNRahat fahimNo ratings yet
- eLearnMarkets OptionsBuying HindiDocument17 pageseLearnMarkets OptionsBuying Hindisrinivas20% (1)
- Am Jetstream Pre-Int Unit 8 Lesson 2Document2 pagesAm Jetstream Pre-Int Unit 8 Lesson 2Jennyfer Guevara50% (2)
- M7Ge-Iiib-1: Renante Tillo JosolDocument3 pagesM7Ge-Iiib-1: Renante Tillo JosolRenante T. JosolNo ratings yet
- 02 Photogrammetry - Vertical PhotoDocument37 pages02 Photogrammetry - Vertical PhotoAhmed ElsaidNo ratings yet
- Upfc PlacementDocument0 pagesUpfc PlacementVamsi KumarNo ratings yet
- كتالوج وصفي للعملات الرومانية النادرة وغير المحررة من الفترة الأولى للعملات المعدنية الرومانية إلى انقراض الإمبراطورية تحت حكDocument570 pagesكتالوج وصفي للعملات الرومانية النادرة وغير المحررة من الفترة الأولى للعملات المعدنية الرومانية إلى انقراض الإمبراطورية تحت حكFayza MaghrabiNo ratings yet
- The Light BulbDocument6 pagesThe Light Bulbapi-244765407No ratings yet
- QBM101Document37 pagesQBM101Shang BinNo ratings yet
- Tender Document For EOI of NIFT BhopalDocument19 pagesTender Document For EOI of NIFT Bhopalkethhes waranNo ratings yet
- EHS Audit - Review PaperDocument5 pagesEHS Audit - Review PaperYousef OlabiNo ratings yet
- Management From RamayanaDocument14 pagesManagement From Ramayanasaaket batchuNo ratings yet
- Uber+PM+Prioritisation+Assignment+Submission+File-Shashank KaranthDocument6 pagesUber+PM+Prioritisation+Assignment+Submission+File-Shashank KaranthShashank KaranthNo ratings yet
- A Christmas Memory. Lesson - AnthologyDocument24 pagesA Christmas Memory. Lesson - AnthologySherry CallisonNo ratings yet
- But Flee Youthful Lusts - pdf2Document2 pagesBut Flee Youthful Lusts - pdf2emmaboakye2fNo ratings yet
- h4 History of India Ad 1526 - Ad 1707Document2 pagesh4 History of India Ad 1526 - Ad 1707Baddela ReddyNo ratings yet
- ECON 211: Principles of Macroeconomics-901: Smhussain@vcu - EduDocument6 pagesECON 211: Principles of Macroeconomics-901: Smhussain@vcu - EdusshinnNo ratings yet
- Pengaruh PH Ekstraksi Terhadap Rendemen, Sifat Fisiko-Kimia Dan Fungsional Konsentrat Protein KACANG GUDE (Cajanus Cajan (L.) Millsp.)Document11 pagesPengaruh PH Ekstraksi Terhadap Rendemen, Sifat Fisiko-Kimia Dan Fungsional Konsentrat Protein KACANG GUDE (Cajanus Cajan (L.) Millsp.)Rezaa RezNo ratings yet
- Cassius Resume CVLatestDocument3 pagesCassius Resume CVLatestCaszNo ratings yet
- Airport Lounges Industry-Report-Frost-SullivanDocument112 pagesAirport Lounges Industry-Report-Frost-SullivansandeepNo ratings yet
- Wind Turbine Power Plant Seminar ReportDocument32 pagesWind Turbine Power Plant Seminar ReportShafieul mohammadNo ratings yet
- Trockel Flash Art 1987Document4 pagesTrockel Flash Art 1987cvg_geNo ratings yet
- SAP Group Reporting 1909Document28 pagesSAP Group Reporting 1909SUDIPTADATTARAY86% (7)
- Activity 1.1.2 Simple Machine Practice Problems KeyDocument6 pagesActivity 1.1.2 Simple Machine Practice Problems KeyNehemiah GriffinNo ratings yet