You might also like
- Aic Lec 12 5t Ota v01Document37 pagesAic Lec 12 5t Ota v01Mustafa NasserNo ratings yet
- Aic Lec 11 Diffamp v01Document60 pagesAic Lec 11 Diffamp v01Mustafa NasserNo ratings yet
- Aic Lec 08 Freq1 v01Document46 pagesAic Lec 08 Freq1 v01Mustafa NasserNo ratings yet
- Aic Lec 12 5t Ota v01Document40 pagesAic Lec 12 5t Ota v01Sayed KamelNo ratings yet
- Aic Lec 19 Otas v01Document46 pagesAic Lec 19 Otas v01Aram ShishmanyanNo ratings yet
- Aic Lec 07 Cascode v01Document35 pagesAic Lec 07 Cascode v01mostafaelnahasmohamedNo ratings yet
- Aic Lec 06 Basic Amplifiers v01 PDFDocument53 pagesAic Lec 06 Basic Amplifiers v01 PDFAram ShishmanyanNo ratings yet
- Aic Lec 07 Cascode v01Document35 pagesAic Lec 07 Cascode v01Mustafa NasserNo ratings yet
- Aic Lec 05 Mosfet Ac v01Document27 pagesAic Lec 05 Mosfet Ac v01Mustafa NasserNo ratings yet
- Aic Lec 05 Mosfet Ac v01Document20 pagesAic Lec 05 Mosfet Ac v01Aram ShishmanyanNo ratings yet
- EEC 140B: MOSFTE: Modern DevicesDocument18 pagesEEC 140B: MOSFTE: Modern DevicesGerardo SanchezNo ratings yet
- Aic Lec 05 Mosfet Ac v01Document19 pagesAic Lec 05 Mosfet Ac v01KarimMohamedNo ratings yet
- Session 21 - Modulation (I)Document24 pagesSession 21 - Modulation (I)Daniela GiraldoNo ratings yet
- WH ITd Ti Fdlza IXmmDocument36 pagesWH ITd Ti Fdlza IXmmSarinNo ratings yet
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- Discrete Time Analog Circuits: Kanazawa University Microelectronics Research Lab. Akio KitagawaDocument22 pagesDiscrete Time Analog Circuits: Kanazawa University Microelectronics Research Lab. Akio KitagawaKulanthaivelu RamaswamyNo ratings yet
- 07 FET - AmpDocument10 pages07 FET - AmpFrancisco Anabalón SepúlvedaNo ratings yet
- TransformerDocument45 pagesTransformerM.Tharun KumarNo ratings yet
- Analysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersDocument22 pagesAnalysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersAndrea FasatoNo ratings yet
- 454 Final Cheat SheetDocument4 pages454 Final Cheat SheetJoe MorganNo ratings yet
- Formula SheetDocument1 pageFormula SheetChika OfiliNo ratings yet
- Module - 4-4 - Multi-Stage AmplifiersDocument24 pagesModule - 4-4 - Multi-Stage AmplifiersshoukatawaisaliNo ratings yet
- Chöông 4: Mạch Khuếch Đại Liên TầngDocument54 pagesChöông 4: Mạch Khuếch Đại Liên TầngFate LoveNo ratings yet
- 12 Second-Order Circuits (Part 2)Document32 pages12 Second-Order Circuits (Part 2)Brandon CilNo ratings yet
- Aic Lec 02 Circuits Review v01Document25 pagesAic Lec 02 Circuits Review v01AbdulrhmanNo ratings yet
- P.R. Gray, "Analysis and Design of Analog Integrated Circuits", 4.3.5, 6.2 6.3Document70 pagesP.R. Gray, "Analysis and Design of Analog Integrated Circuits", 4.3.5, 6.2 6.3Yeu academiaNo ratings yet
- EEE 1287-Fall 2019-Topic 07Document46 pagesEEE 1287-Fall 2019-Topic 07Ahnaf AmerNo ratings yet
- Active LoadDocument69 pagesActive LoadVijay P. LabdeNo ratings yet
- The DSB-SCDocument21 pagesThe DSB-SCmhww9jqqpjNo ratings yet
- MOS inDocument82 pagesMOS inhet shahNo ratings yet
- Lec 8 5 8 6BJT-Differential AmplifierDocument105 pagesLec 8 5 8 6BJT-Differential AmplifierRakhmeen gulNo ratings yet
- Chapter (5) Part (2) (Long Channel MOSFET)Document22 pagesChapter (5) Part (2) (Long Channel MOSFET)Ahmed SalehNo ratings yet
- Techreport ShortcirDocument16 pagesTechreport ShortcirrajeshNo ratings yet
- 6 Es2c0 Tutorial Worksheet 6 Mosfet BiasingDocument2 pages6 Es2c0 Tutorial Worksheet 6 Mosfet BiasingNamita GeraNo ratings yet
- Degine of 2 Stage CMOs Opamp......Document14 pagesDegine of 2 Stage CMOs Opamp......Vinay MishraNo ratings yet
- VM Switching PowerDocument81 pagesVM Switching PowerSuman MalikNo ratings yet
- DSP Control Loop DesignDocument24 pagesDSP Control Loop DesignVeljko TomaševićNo ratings yet
- Diodo Emisor de Luz (LED) : Fibra ÓpticaDocument1 pageDiodo Emisor de Luz (LED) : Fibra ÓpticaDario Vasco MeleroNo ratings yet
- 28-Pseudo Nmos, DCVSL and Dynamic Logic-12!09!2020 (12-Sep-2020) Material I 12-Sep-2020 CMOS Combinational Circuit DesignDocument22 pages28-Pseudo Nmos, DCVSL and Dynamic Logic-12!09!2020 (12-Sep-2020) Material I 12-Sep-2020 CMOS Combinational Circuit DesignParth VijayNo ratings yet
- Part3 Small SignalDocument8 pagesPart3 Small Signalanonyme3897No ratings yet
- 6 Z TransformDocument69 pages6 Z TransformAyesha ZafarNo ratings yet
- 6002x Notes ExscapeDocument77 pages6002x Notes ExscapeNVNo ratings yet
- Cmos Digital Vlsi Design: Cmos Inverter Basics - IDocument20 pagesCmos Digital Vlsi Design: Cmos Inverter Basics - ISrikanth PasumarthyNo ratings yet
- Vlsi Classroom Material (16-Aug-2011)Document37 pagesVlsi Classroom Material (16-Aug-2011)naveensilveriNo ratings yet
- MIT OCW 6.012-Lec24Document17 pagesMIT OCW 6.012-Lec24AbhishekNo ratings yet
- W18 ECE140 Final-FormulasDocument1 pageW18 ECE140 Final-FormulasCatherine FengNo ratings yet
- Electronics Ch8Document35 pagesElectronics Ch8Boudi ChouNo ratings yet
- Elec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Document4 pagesElec Eng 2ei5 Microelectronic Devices and Circuits I Winter 2011 Final Exam - April 25, 2011Filip ZubacNo ratings yet
- Chapter 4. Analog Building Blocks An Intuitive Approach (Analog IC Design An Intuitive Approach)Document33 pagesChapter 4. Analog Building Blocks An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungNo ratings yet
- Lec 11 Sequential Logic CircuitsDocument49 pagesLec 11 Sequential Logic CircuitsDeependra NigamNo ratings yet
- Design Problem:: Design A Fully Differential Version of Two Stage CMOS Op-Amp With The Following SpecificationsDocument37 pagesDesign Problem:: Design A Fully Differential Version of Two Stage CMOS Op-Amp With The Following Specificationslearn simplyNo ratings yet
- Snubber Circuit Design MethodsDocument7 pagesSnubber Circuit Design MethodsNikolas AugustoNo ratings yet
- Height of MAC Above Ground, FT: S V 1.2 LOF VDocument20 pagesHeight of MAC Above Ground, FT: S V 1.2 LOF VJonathan CruzNo ratings yet
- Ecen 607 CMFB-2011Document44 pagesEcen 607 CMFB-2011Girish K NathNo ratings yet
- CMOS Inverter: Ankur R ChangelaDocument25 pagesCMOS Inverter: Ankur R ChangelaAnkur PatelNo ratings yet
- DC Analysis of Differential AmplifierDocument9 pagesDC Analysis of Differential AmplifierJay ReposoNo ratings yet
- SP07-Lecture9-Frequency Response-MOS OnlyDocument10 pagesSP07-Lecture9-Frequency Response-MOS OnlyRajendra ThamerciNo ratings yet
- FormulaDocument4 pagesFormulamargaret_navaeiNo ratings yet
- Sheet 7 Feedback Analysis: 1. Determine The Polarity of Feedback in Each of The Following CircuitsDocument2 pagesSheet 7 Feedback Analysis: 1. Determine The Polarity of Feedback in Each of The Following CircuitsMustafa NasserNo ratings yet
- Task 1 - 3 (3) - HadyDocument3 pagesTask 1 - 3 (3) - HadyMustafa NasserNo ratings yet
- Ariajhkj: Scanned by CamscannerDocument11 pagesAriajhkj: Scanned by CamscannerMustafa NasserNo ratings yet
- Problemsolved PDFDocument3 pagesProblemsolved PDFMustafa NasserNo ratings yet
- Introscribd PDFDocument12 pagesIntroscribd PDFMustafa NasserNo ratings yet
- Spartan-6 FPGA Clocking Resources: User GuideDocument116 pagesSpartan-6 FPGA Clocking Resources: User GuideMustafa NasserNo ratings yet
- Design and Implementation of First in First Out MemoryDocument64 pagesDesign and Implementation of First in First Out MemoryMustafa NasserNo ratings yet
- SImple CPU DesignDocument19 pagesSImple CPU DesignMustafa NasserNo ratings yet
- Aic Lec 07 Cascode v01Document35 pagesAic Lec 07 Cascode v01Mustafa NasserNo ratings yet
- Aic Lec 04 Mosfet DC v01Document55 pagesAic Lec 04 Mosfet DC v01Mustafa NasserNo ratings yet
- Aic Lec 05 Mosfet Ac v01Document27 pagesAic Lec 05 Mosfet Ac v01Mustafa NasserNo ratings yet
- IG Client Sentiment Report 2020-12-03 12 - 00 PDFDocument36 pagesIG Client Sentiment Report 2020-12-03 12 - 00 PDFEno Ronaldfrank OguriNo ratings yet
- Geometallurgical Modelling of The Collahuasi Flotation CircuitDocument6 pagesGeometallurgical Modelling of The Collahuasi Flotation CircuitFrancisco CampbellNo ratings yet
- IN804 UV-VIS Nomenclature and UnitsDocument5 pagesIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomNo ratings yet
- SITRUST Brochure PDFDocument8 pagesSITRUST Brochure PDFÐôùxBébê Ðê MãmäñNo ratings yet
- TA-Modulator EN LowDocument16 pagesTA-Modulator EN Lowkap4enijNo ratings yet
- Robit Forepoling Catalogue ENG 03-2015Document36 pagesRobit Forepoling Catalogue ENG 03-2015Purwadi Eko SaputroNo ratings yet
- Jaquar Sanitarywares PricelistDocument8 pagesJaquar Sanitarywares PricelistAnil KumarNo ratings yet
- Hydrogen Sulfide and Mercaptan Sulfur in Liquid Hydrocarbons by Potentiometric TitrationDocument8 pagesHydrogen Sulfide and Mercaptan Sulfur in Liquid Hydrocarbons by Potentiometric TitrationINOPETRO DO BRASILNo ratings yet
- h2s Naoh Equilibrium CurveDocument22 pagesh2s Naoh Equilibrium Curvesmartleo_waloNo ratings yet
- SVC200Document5 pagesSVC200fransiskus_ricky3329No ratings yet
- BITS Pilani: Scale Up and Post Approval ChangesDocument56 pagesBITS Pilani: Scale Up and Post Approval ChangesshrikantmsdNo ratings yet
- P16mba7 1Document4 pagesP16mba7 1Vishalatchi MNo ratings yet
- Cibse TM65 (2020)Document67 pagesCibse TM65 (2020)Reli Hano100% (1)
- Wartsila O Env Multi Stage Flash EvaporatorsDocument2 pagesWartsila O Env Multi Stage Flash EvaporatorsRichard Periyanayagam0% (1)
- 1 Ha Cabbages - May 2018 PDFDocument1 page1 Ha Cabbages - May 2018 PDFMwai EstherNo ratings yet
- BS9266 2013 Adaptable HousingDocument46 pagesBS9266 2013 Adaptable HousingGrant MastersonNo ratings yet
- Optimal Control Development System For ElectricalDocument7 pagesOptimal Control Development System For ElectricalCRISTIAN CAMILO MORALES SOLISNo ratings yet
- Solutions Tutorial 6Document9 pagesSolutions Tutorial 6Nur Aqilah Abdullah HashimNo ratings yet
- Series Portable Oscilloscopes: Keysight DSO1000A/BDocument15 pagesSeries Portable Oscilloscopes: Keysight DSO1000A/BNestor CardenasNo ratings yet
- Uenr0997 12 00 - Manuals Service Modules - Testing & AdjustingDocument90 pagesUenr0997 12 00 - Manuals Service Modules - Testing & Adjustingmostafa aliNo ratings yet
- Aesa Vs PesaDocument30 pagesAesa Vs Pesakab11512100% (1)
- PCI Express Test Spec Platform 3.0 06182013 TSDocument383 pagesPCI Express Test Spec Platform 3.0 06182013 TSDeng XinNo ratings yet
- Pro Tester ManualDocument49 pagesPro Tester ManualRobson AlencarNo ratings yet
- Apple Witness ListDocument30 pagesApple Witness ListMikey CampbellNo ratings yet
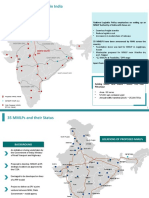
- Development of Mmlps in India: Western DFC Eastern DFCDocument2 pagesDevelopment of Mmlps in India: Western DFC Eastern DFCsdfg100% (2)
- Manual of Avionics PDFDocument300 pagesManual of Avionics PDFJhony BhatNo ratings yet
- Plaquette-Costronic en 2020Document2 pagesPlaquette-Costronic en 2020Jun OrtizNo ratings yet
- Shallow FoundationsDocument44 pagesShallow FoundationsAjay SinghNo ratings yet
- Zoom and Re-Zoom Team ActivityDocument2 pagesZoom and Re-Zoom Team ActivityWalshie28050% (1)
- Metalastik Type Chevron SpringsDocument6 pagesMetalastik Type Chevron SpringsBo WangNo ratings yet