You might also like
- Merlin Gerin Medium Voltage Distribution Switchgear Technical ManualDocument18 pagesMerlin Gerin Medium Voltage Distribution Switchgear Technical ManualMohammed Madi100% (1)
- 500kv 220kv, NTDC, Grid Station Gatti Faisalabad.Document56 pages500kv 220kv, NTDC, Grid Station Gatti Faisalabad.Cheap but good100% (3)
- ATR Ata - 25 - Equipment - FurnishingDocument58 pagesATR Ata - 25 - Equipment - FurnishingJesús Montalvo FernándezNo ratings yet
- Southern Luzon State University: College of Engineering Mechanical Engineering DepartmentDocument8 pagesSouthern Luzon State University: College of Engineering Mechanical Engineering DepartmentRosalyNo ratings yet
- IBP - Help For Standard Keyfigures PDFDocument311 pagesIBP - Help For Standard Keyfigures PDFSaurabh KulkarniNo ratings yet
- Real Time Operating SystemsDocument8 pagesReal Time Operating SystemsJeslet JoyNo ratings yet
- Control Systems Lab Course OverviewDocument6 pagesControl Systems Lab Course Overviewayesha amjadNo ratings yet
- EMILAB8Document6 pagesEMILAB8moeena jamalNo ratings yet
- Date:. - Experiment # 12 Roll No.: - : To Complete Your TasksDocument4 pagesDate:. - Experiment # 12 Roll No.: - : To Complete Your TasksRasheed ShahNo ratings yet
- Syllabus: Course Information Teacher InformationDocument4 pagesSyllabus: Course Information Teacher InformationReyar SenoNo ratings yet
- Dae31203 Lab3 Sem2sesi22-23Document14 pagesDae31203 Lab3 Sem2sesi22-23Arief Musta'in Bin Mohammad Ilyas SahuriNo ratings yet
- Date:. - Experiment # 11 Roll No.: - : To Complete Your TasksDocument6 pagesDate:. - Experiment # 11 Roll No.: - : To Complete Your TasksRasheed ShahNo ratings yet
- 3B SyabusDocument2 pages3B SyabusSHIJONo ratings yet
- Outline-CLOs-PLOs-Rubrics-WP LabDocument2 pagesOutline-CLOs-PLOs-Rubrics-WP Labrizwan900No ratings yet
- Control Systems Lab ManualDocument55 pagesControl Systems Lab ManualNarendra ChaurasiaNo ratings yet
- DSP Lab - 15ecl57 Manual: Bms Institute of Technology& ManagementDocument110 pagesDSP Lab - 15ecl57 Manual: Bms Institute of Technology& Managementsethu ramanNo ratings yet
- Computational Methods Lab Manual - 230926 - 094757Document28 pagesComputational Methods Lab Manual - 230926 - 094757luthrasakshammNo ratings yet
- CDF DLD Lab 2020Document3 pagesCDF DLD Lab 2020Muhammad Fayyaz Khan AP Electronics ABTNo ratings yet
- ECT307 CS SyllabusDocument10 pagesECT307 CS Syllabusjinto0007No ratings yet
- TM351 Spring 2018 MTA StructureCoverage 01Document2 pagesTM351 Spring 2018 MTA StructureCoverage 01Christina FingtonNo ratings yet
- Vibration MeterDocument11 pagesVibration MeterNatNo ratings yet
- EE428 Industrail Process Control - OutlineDocument3 pagesEE428 Industrail Process Control - OutlineabdurrehmanNo ratings yet
- Course Profile Lab RefeDocument11 pagesCourse Profile Lab RefesatishNo ratings yet
- 21RA43 MicrocontrollerDocument4 pages21RA43 MicrocontrollerSamvrudh NagarajNo ratings yet
- Course Policy Design 2IC302 MPMC - 2021Document9 pagesCourse Policy Design 2IC302 MPMC - 2021dhawadanish19No ratings yet
- Laboratory Manual: 15Ts704 Control Systems For MachinesDocument6 pagesLaboratory Manual: 15Ts704 Control Systems For Machinesjogi giridharNo ratings yet
- Assignment 1 - Closed Loop DynamicsDocument12 pagesAssignment 1 - Closed Loop DynamicsTharaka AmarasiriNo ratings yet
- Lab Mid Epe6B - CTRLDocument1 pageLab Mid Epe6B - CTRLarshadabdNo ratings yet
- EE-102 Introduction to ComputingDocument2 pagesEE-102 Introduction to ComputingSalman AnjumNo ratings yet
- Lica Lab ManualDocument83 pagesLica Lab ManualDinesh DoddiNo ratings yet
- UNITEN - Course Outlines - EEED234-1073 - Industrial Automation JulyDocument9 pagesUNITEN - Course Outlines - EEED234-1073 - Industrial Automation JulyAravin ArunNo ratings yet
- Embedded System & Microcontroller Application Course Code: 4351102Document8 pagesEmbedded System & Microcontroller Application Course Code: 4351102Raggy TannaNo ratings yet
- CS Lecture 1Document6 pagesCS Lecture 1sadaf asmaNo ratings yet
- CDF-CSC322 Operating SystemsDocument9 pagesCDF-CSC322 Operating SystemsHassam HafeezNo ratings yet
- CS LAB 12-Report-190469Document10 pagesCS LAB 12-Report-190469malik awaisNo ratings yet
- Laboratory Manual: PC-BTE506 - Control System LaboratoryDocument44 pagesLaboratory Manual: PC-BTE506 - Control System LaboratoryVedant .ChavanNo ratings yet
- Form 1 Course OutlineDocument5 pagesForm 1 Course OutlineMuhammad SumeetNo ratings yet
- CPE324 Digital Signal Processing Course DescriptionDocument9 pagesCPE324 Digital Signal Processing Course DescriptionSouban JavedNo ratings yet
- Rns Institute of Technology: Advanced Communication Laboratory ManualDocument74 pagesRns Institute of Technology: Advanced Communication Laboratory ManualharshithaysNo ratings yet
- Oop Final MergedDocument80 pagesOop Final Mergeddaniyalshabbir952No ratings yet
- CDF DLD TheoryDocument4 pagesCDF DLD TheoryMuhammad Fayyaz Khan AP Electronics ABTNo ratings yet
- SAS Lab Manual For 17-18Document76 pagesSAS Lab Manual For 17-18Amir QureshiNo ratings yet
- Lesson Plan MAC 2019 CPE622Document4 pagesLesson Plan MAC 2019 CPE622Aeyrul KhairulNo ratings yet
- Hammad Khan Lab07Document8 pagesHammad Khan Lab07Inshal GhafoorNo ratings yet
- Department of Electrical Engineering: Course Clos, Plo Mapping, 12 Weeks Course Breakup and Assessment ToolsDocument2 pagesDepartment of Electrical Engineering: Course Clos, Plo Mapping, 12 Weeks Course Breakup and Assessment ToolsNOOR UR AIN ZAFARNo ratings yet
- BEC302 NotesDocument230 pagesBEC302 NoteslikithNo ratings yet
- F2-16 Weeks Course B LCS 2k17Document2 pagesF2-16 Weeks Course B LCS 2k17MehboobNo ratings yet
- OS test questions and answers guideDocument5 pagesOS test questions and answers guideBelete BelayNo ratings yet
- Control Lab Manual Spce Ver1Document38 pagesControl Lab Manual Spce Ver1Vedant .ChavanNo ratings yet
- DSP 15scheme Lab Manual PDFDocument63 pagesDSP 15scheme Lab Manual PDFShare The ExperienceNo ratings yet
- Metro Logy: B.Sc. Industrial Engineering and ManagementDocument3 pagesMetro Logy: B.Sc. Industrial Engineering and Managementsyed aliNo ratings yet
- Laboratory 1 Name: - : Embedded and Realtime SystemsDocument4 pagesLaboratory 1 Name: - : Embedded and Realtime SystemsanthohoranNo ratings yet
- Academic Assessment Unit The University of Lahore 1Km Defense Road LahoreDocument9 pagesAcademic Assessment Unit The University of Lahore 1Km Defense Road LahoreusmanzahidNo ratings yet
- Apna MSTDocument13 pagesApna MSTShwet SharmaNo ratings yet
- Electrical Control System Lab ReportDocument44 pagesElectrical Control System Lab ReportDavid WarnerNo ratings yet
- Course OutlineDocument3 pagesCourse OutlineSyed AsfandyarNo ratings yet
- CDF Optoelectronics 2022Document3 pagesCDF Optoelectronics 2022Muhammad Fayyaz Khan AP Electronics ABTNo ratings yet
- EE426 - Digital Control System Lab: Assignment 1Document4 pagesEE426 - Digital Control System Lab: Assignment 1Rasheed ShahNo ratings yet
- Department: Lab ManualDocument36 pagesDepartment: Lab ManualPragun SinghalNo ratings yet
- 636f65a5d5f80SS Lab6 FAll2022Document7 pages636f65a5d5f80SS Lab6 FAll2022Muhammad YousafNo ratings yet
- Lab 5Document5 pagesLab 5Nishat AhmedNo ratings yet
- Network Administration Lab Syllabus For Diploma 3rd Sem CSDocument6 pagesNetwork Administration Lab Syllabus For Diploma 3rd Sem CSVishal Raj.VNo ratings yet
- Ael331 Analog Integrated Circuits and Instrumentation LabDocument3 pagesAel331 Analog Integrated Circuits and Instrumentation LabreshmaNo ratings yet
- Internship Report FormatDocument1 pageInternship Report FormatMaryamNo ratings yet
- Lab 9Document5 pagesLab 9Rasheed ShahNo ratings yet
- Date: Experiment # 2 Roll No.:: Follow InstructionsDocument3 pagesDate: Experiment # 2 Roll No.:: Follow InstructionsRasheed ShahNo ratings yet
- Different BDocument1 pageDifferent BRasheed ShahNo ratings yet
- Generator Protection LabDocument32 pagesGenerator Protection LabRasheed ShahNo ratings yet
- Consult New-Registration Form (For Foreign)Document17 pagesConsult New-Registration Form (For Foreign)Rasheed ShahNo ratings yet
- Ieee 30 Bus Technical NoteDocument10 pagesIeee 30 Bus Technical NoteRasheed ShahNo ratings yet
- Experiment#1: ObjectiveDocument4 pagesExperiment#1: ObjectiveRasheed ShahNo ratings yet
- Instruction For Final Assessment TestDocument2 pagesInstruction For Final Assessment TestRasheed Shah100% (1)
- Fuel Cell Technology in PakistanDocument12 pagesFuel Cell Technology in PakistanMuhammad Ali Abro50% (2)
- Date:. - Experiment # 11 Roll No.: - : To Complete Your TasksDocument6 pagesDate:. - Experiment # 11 Roll No.: - : To Complete Your TasksRasheed ShahNo ratings yet
- Assignment 1 Details Fuel Cell Powered CarsDocument8 pagesAssignment 1 Details Fuel Cell Powered CarsRasheed ShahNo ratings yet
- Toyota's Mini EV Fuel Cell Design and Cost AnalysisDocument5 pagesToyota's Mini EV Fuel Cell Design and Cost AnalysisRasheed ShahNo ratings yet
- Build Better Gantt Charts With Teamgantt For Free!: First Sample ProjectDocument10 pagesBuild Better Gantt Charts With Teamgantt For Free!: First Sample ProjectMuhammad Khairul HafiziNo ratings yet
- GM GSC South NTDC Praises Hardware SupplierDocument1 pageGM GSC South NTDC Praises Hardware SupplierRasheed ShahNo ratings yet
- 817C Optocoupler Datasheet PDFDocument15 pages817C Optocoupler Datasheet PDFAirton SousaNo ratings yet
- 1-MEPCO Net Metering Category-I Final 12-01-2018 Feeder 621Document27 pages1-MEPCO Net Metering Category-I Final 12-01-2018 Feeder 621Rasheed ShahNo ratings yet
- 2k16 Ele 104 HOD AssignmentDocument8 pages2k16 Ele 104 HOD AssignmentRasheed ShahNo ratings yet
- Solar Based 3-Phase Net Metering System: NAMESDocument39 pagesSolar Based 3-Phase Net Metering System: NAMESRasheed ShahNo ratings yet
- Location: Project: Date:: Saima2Document1 pageLocation: Project: Date:: Saima2Rasheed ShahNo ratings yet
- NFC-Institute of Engineering & Technology, Multan: Do Not Start Without Reading InstructionsDocument1 pageNFC-Institute of Engineering & Technology, Multan: Do Not Start Without Reading InstructionsRasheed ShahNo ratings yet
- Transmission and Distribution of Electrical PowerDocument55 pagesTransmission and Distribution of Electrical PowerAnswer GoodnewsNo ratings yet
- For M1: Open Loop:: All 'S' 'Response' 'Time' 'Amplitude'Document4 pagesFor M1: Open Loop:: All 'S' 'Response' 'Time' 'Amplitude'Rasheed ShahNo ratings yet
- Moti 2111Document1 pageMoti 2111Rasheed ShahNo ratings yet
- Transmission and Distribution of Electrical PowerDocument55 pagesTransmission and Distribution of Electrical PowerAnswer GoodnewsNo ratings yet
- NFC-Institute of Engineering & Technology, Multan: Do Not Start Without Reading InstructionsDocument1 pageNFC-Institute of Engineering & Technology, Multan: Do Not Start Without Reading InstructionsRasheed ShahNo ratings yet
- GM GSC South NTDC Praises Hardware SupplierDocument1 pageGM GSC South NTDC Praises Hardware SupplierRasheed ShahNo ratings yet
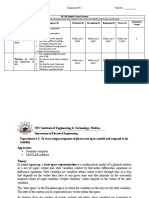
- Study Undervoltage and Overvoltage Protection of GeneratorDocument20 pagesStudy Undervoltage and Overvoltage Protection of GeneratorRasheed Shah100% (1)
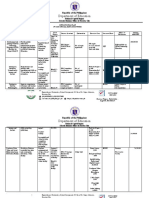
- Department of Education: Republic of The PhilippinesDocument3 pagesDepartment of Education: Republic of The Philippinesmarco medurandaNo ratings yet
- Acquiring Host-Based EvidenceDocument21 pagesAcquiring Host-Based EvidencejigyanshuNo ratings yet
- 6H000200 PDFDocument2 pages6H000200 PDFSachin RamadasanNo ratings yet
- Cymdist 4.7: 3. Load Modeling and Load AllocationDocument4 pagesCymdist 4.7: 3. Load Modeling and Load AllocationJordy QuezadaNo ratings yet
- SUPPLY CHAIN ANALYTICS - Final ProjectDocument19 pagesSUPPLY CHAIN ANALYTICS - Final ProjectAksh RathodNo ratings yet
- CES 2020 Summary: by Frank Egle, I/EZ-I (Slide 1-46), Dr. Harald Altinger I/EF-XS (Slide 47-50)Document50 pagesCES 2020 Summary: by Frank Egle, I/EZ-I (Slide 1-46), Dr. Harald Altinger I/EF-XS (Slide 47-50)mazuedNo ratings yet
- Thesis Synopsis AI TOWNLETDocument6 pagesThesis Synopsis AI TOWNLETmohammed arfadNo ratings yet
- Act Sheet For RoboticsDocument4 pagesAct Sheet For RoboticsErah Kim GomezNo ratings yet
- Atswa: Study TextDocument479 pagesAtswa: Study TextBrittney JamesNo ratings yet
- Eduwork: Free Class Web ProgrammingDocument53 pagesEduwork: Free Class Web ProgrammingAgnesNo ratings yet
- MegaSync Log File Details Startup ProcessDocument2,455 pagesMegaSync Log File Details Startup ProcessAndres Calle HuayancaNo ratings yet
- 2. CHUYÊN ĐỀ 2 (LỖI SAI + VIẾT CÂU)Document4 pages2. CHUYÊN ĐỀ 2 (LỖI SAI + VIẾT CÂU)farm 3 chi di0% (1)
- OXIMATE SDN BHD product list and contact detailsDocument3 pagesOXIMATE SDN BHD product list and contact detailsWANNo ratings yet
- UN Women Branding GuidelinesDocument37 pagesUN Women Branding GuidelinesDenis Shepherd KimathiNo ratings yet
- SAUDI ARAMCO OIL COMPANY PLANNER & CONTROL ENGINEER SUNNYDocument2 pagesSAUDI ARAMCO OIL COMPANY PLANNER & CONTROL ENGINEER SUNNYJojo DejucosNo ratings yet
- M5A78L-M PLUS-USB3 Devices ReportDocument21 pagesM5A78L-M PLUS-USB3 Devices ReportDante MoretaNo ratings yet
- 2.2 Organizational StructureDocument60 pages2.2 Organizational StructureMateo Valenzuela Rodriguez100% (1)
- Microsoft Excel Exam Assessment Questions: Important InstructionsDocument3 pagesMicrosoft Excel Exam Assessment Questions: Important InstructionsKaartiikBenNo ratings yet
- 1623917396609-Model Qsns On Comp - GroundDocument10 pages1623917396609-Model Qsns On Comp - Groundrupakdutta158No ratings yet
- Creating E-Portfolio As A Technology ToolDocument3 pagesCreating E-Portfolio As A Technology ToolGian Reyes100% (1)
- JD Requirement College 25jun21Document2 pagesJD Requirement College 25jun21Will MNo ratings yet
- Process Analysis - VariabilityDocument26 pagesProcess Analysis - VariabilityJerry LeeNo ratings yet
- How To Reset Canon MP198Document4 pagesHow To Reset Canon MP198Eko NoegNo ratings yet
- DS3 QueuesDocument38 pagesDS3 QueuesHabib ur rehmanNo ratings yet
- PD2-PaperGang John Wick A4Document2 pagesPD2-PaperGang John Wick A4Bot 2No ratings yet
- Get started with basic Excel formulasDocument84 pagesGet started with basic Excel formulasjerry kisuleNo ratings yet
- Sydney Opera HouseDocument2 pagesSydney Opera HouseMache SebialNo ratings yet