You might also like
- Aircraft Electrical SystemsDocument14 pagesAircraft Electrical Systemskaren juliana quinchanegua garzon100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Difference Between DTC and Scalar Mode PDFDocument6 pagesDifference Between DTC and Scalar Mode PDFVitali LursmanashviliNo ratings yet
- What Is A Diac-TriacDocument26 pagesWhat Is A Diac-TriacChristian Dave Tamparong100% (1)
- Uninterruptible Power SupplyDocument6 pagesUninterruptible Power SupplyGinnethon CerveraNo ratings yet
- 752-65L-0005 Cable Interconnection Schedule (Sg-75a-101&102)Document21 pages752-65L-0005 Cable Interconnection Schedule (Sg-75a-101&102)Aravind DasanNo ratings yet
- 12 - How To Write and Publish A Scientific PaperDocument1 page12 - How To Write and Publish A Scientific PaperismayilcNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- Speed Control of DC Motor Using TriacDocument3 pagesSpeed Control of DC Motor Using Triackummarai saileelaNo ratings yet
- Implementation of Chopper Fed Speed Control of Sep PDFDocument6 pagesImplementation of Chopper Fed Speed Control of Sep PDFDayguel EvansNo ratings yet
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENo ratings yet
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Thyristor Based Speed Control Techniques of DC Motor: A Comparative AnalysisDocument7 pagesThyristor Based Speed Control Techniques of DC Motor: A Comparative Analysismahendra ANo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- Solar Powered Speed Control of Brushless DC MotorDocument7 pagesSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsNo ratings yet
- Asymmetrical Two-Phase Induction Motor Speed Controlled With 4-Leg Voltage Source InverterDocument6 pagesAsymmetrical Two-Phase Induction Motor Speed Controlled With 4-Leg Voltage Source InverterNickNo ratings yet
- DC Chop - Final ReportDocument36 pagesDC Chop - Final ReportReeta DuttaNo ratings yet
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 pagesSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationPrabhat KarnNo ratings yet
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 pagesSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationAlemneh TechiloNo ratings yet
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller BandwidthDocument10 pagesPerformance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller Bandwidthaswardi8756No ratings yet
- SCR Based Single Phase CycloconverterDocument6 pagesSCR Based Single Phase Cycloconverterchandra sekhar sahuNo ratings yet
- Machine Hall g2Document6 pagesMachine Hall g2srinivas kNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Ijs DR 1611003Document13 pagesIjs DR 1611003mohammed.abdullaNo ratings yet
- Speed Control of Separately Excited DC Motor Using Fuzzy Neural Model Reference ControllerDocument14 pagesSpeed Control of Separately Excited DC Motor Using Fuzzy Neural Model Reference ControllerbensumbbNo ratings yet
- Irjet V4i1140 PDFDocument5 pagesIrjet V4i1140 PDFMohamed AhmedNo ratings yet
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriNo ratings yet
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- Induction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationDocument5 pagesInduction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationIJIRST100% (2)
- Direct Torque ControlDocument5 pagesDirect Torque Controlvineeth kumarNo ratings yet
- DC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveDocument14 pagesDC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveNationalinstituteDsnrNo ratings yet
- Practical TitleDocument16 pagesPractical TitleBigNo ratings yet
- Practical TitleDocument16 pagesPractical TitleBigNo ratings yet
- Direct Torque and Frequency Control of Double-Inverter-Fed Slip-Ring Induction Motor DriveDocument9 pagesDirect Torque and Frequency Control of Double-Inverter-Fed Slip-Ring Induction Motor DriveMahmoud ElsayedNo ratings yet
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- Final Report Acs 12Document36 pagesFinal Report Acs 12Abhishek SinghNo ratings yet
- Induction Motor ControlDocument4 pagesInduction Motor ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Variable Frequency Transformer Paper ArezkiDocument9 pagesVariable Frequency Transformer Paper ArezkiRam SankarNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- A Study On DC Motor Operations and Speed Control Using MicrocontrollerDocument5 pagesA Study On DC Motor Operations and Speed Control Using MicrocontrollerabsalnabiNo ratings yet
- Control of SeparatelyDocument5 pagesControl of Separatelyjapantung0No ratings yet
- New DTC Control Scheme For Induction Motors Fed With A Three-Level InverterDocument9 pagesNew DTC Control Scheme For Induction Motors Fed With A Three-Level InverterANKIT PRAJAPATINo ratings yet
- A Passive Control For The Full-Bridge Buck InverterDC Motor SystemDocument5 pagesA Passive Control For The Full-Bridge Buck InverterDC Motor SystemiiscgovindraiNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocument4 pagesAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952No ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Site Special Issue File Path1498478552-Jit-084Document4 pagesSite Special Issue File Path1498478552-Jit-084Bala RajuNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Study of Speed Control of DC Series Motor Using DC ChopperDocument9 pagesStudy of Speed Control of DC Series Motor Using DC ChopperKedari Sri Chaithanya ReddyNo ratings yet
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocument6 pagesInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNo ratings yet
- Performance Analysis of Direct Torque Control of 3-Phase Induction MotorDocument6 pagesPerformance Analysis of Direct Torque Control of 3-Phase Induction MotormaheswaranNo ratings yet
- Design and Customization of Embedded Based Direct Torque Controller OfInduction MotorDocument6 pagesDesign and Customization of Embedded Based Direct Torque Controller OfInduction MotorTJPRC PublicationsNo ratings yet
- Project Synopsys1Document6 pagesProject Synopsys1jvnsr005No ratings yet
- Speed Control of DC Motor Using Chopper: Presented byDocument17 pagesSpeed Control of DC Motor Using Chopper: Presented bydeviselva75No ratings yet
- Speed Control of DC Motor Using MicrocontrollerDocument5 pagesSpeed Control of DC Motor Using MicrocontrollerVenkatesan SwamyNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
- m3 M Tech Hybrid Electric Vehicles 01ee7315 Dec 2017Document2 pagesm3 M Tech Hybrid Electric Vehicles 01ee7315 Dec 2017ismayilcNo ratings yet
- Seminar Topic M 4 To 6Document1 pageSeminar Topic M 4 To 6ismayilcNo ratings yet
- MPC Types 1Document17 pagesMPC Types 1ismayilcNo ratings yet
- Researchon Regenerative Braking Systems AReviewDocument8 pagesResearchon Regenerative Braking Systems AReviewismayilcNo ratings yet
- Seminar Topic M 1 To 3Document1 pageSeminar Topic M 1 To 3ismayilcNo ratings yet
- F G1169 Pages: 2: Answer All Questions, Each Carries 5 MarksDocument2 pagesF G1169 Pages: 2: Answer All Questions, Each Carries 5 MarksismayilcNo ratings yet
- Energies MagazineDocument21 pagesEnergies MagazineismayilcNo ratings yet
- Thesis On EmsDocument144 pagesThesis On EmsismayilcNo ratings yet
- Control of Hybrid Electric Vehicles: Optimal Energy-Management StrategiesDocument11 pagesControl of Hybrid Electric Vehicles: Optimal Energy-Management StrategiesismayilcNo ratings yet
- MPC Types 3 PDFDocument15 pagesMPC Types 3 PDFismayilcNo ratings yet
- Renewable and Sustainable Energy Reviews: Amier Ibrahim, Fangming JiangDocument28 pagesRenewable and Sustainable Energy Reviews: Amier Ibrahim, Fangming JiangismayilcNo ratings yet
- Environmental Ethics For Engineers: Pace Environmental Law ReviewDocument6 pagesEnvironmental Ethics For Engineers: Pace Environmental Law ReviewismayilcNo ratings yet
- Ems of HevDocument7 pagesEms of HevismayilcNo ratings yet
- MPC Types 2 PDFDocument20 pagesMPC Types 2 PDFismayilcNo ratings yet
- MPC Types 1Document17 pagesMPC Types 1ismayilcNo ratings yet
- CH 04Document38 pagesCH 04varunjajooNo ratings yet
- AnalysisDocument107 pagesAnalysischem_dream00No ratings yet
- BBA Core Business Research MethodsDocument97 pagesBBA Core Business Research MethodsAnonymous GrmNzm3gNo ratings yet
- Four Quadrant Speed Control of DC Motor Using ChopperDocument5 pagesFour Quadrant Speed Control of DC Motor Using ChopperismayilcNo ratings yet
- Research Methodology: M.A.Political ScienceDocument59 pagesResearch Methodology: M.A.Political Scienceong SakuraNo ratings yet
- Data CollectionDocument43 pagesData CollectionismayilcNo ratings yet
- Surprise Assignment:: EE469 Electric and Hybrid VehiclesDocument1 pageSurprise Assignment:: EE469 Electric and Hybrid VehiclesismayilcNo ratings yet
- Design and Operation of DC Drive Using Class E Chopper: R.Spandhana, Syed Sarfaraz NawazDocument8 pagesDesign and Operation of DC Drive Using Class E Chopper: R.Spandhana, Syed Sarfaraz NawazismayilcNo ratings yet
- Energies 08 10636 PDFDocument28 pagesEnergies 08 10636 PDFHusain KanchwalaNo ratings yet
- Environmental and Social Issues Concerned With Hybrid Cars PDFDocument120 pagesEnvironmental and Social Issues Concerned With Hybrid Cars PDFismayilcNo ratings yet
- Lecture 16 4 Quadrant Operation of Chopper PDFDocument27 pagesLecture 16 4 Quadrant Operation of Chopper PDFDiksha VermaNo ratings yet
- Ee6503 - Power Electronics: 2 Marks and 16 Marks-Question Bank Unit 1 - Introduction Two MarksDocument30 pagesEe6503 - Power Electronics: 2 Marks and 16 Marks-Question Bank Unit 1 - Introduction Two Marksdishore312No ratings yet
- LECTURE .4: Single-Phase Full-Wave Uncontrolled Rectifiers 4.1-Case of Resistive LoadDocument6 pagesLECTURE .4: Single-Phase Full-Wave Uncontrolled Rectifiers 4.1-Case of Resistive LoadElectrifying GateNo ratings yet
- Project List PDFDocument40 pagesProject List PDFThulasi PrasadNo ratings yet
- Bee4223 - Power Electronics & Drives SysDocument9 pagesBee4223 - Power Electronics & Drives Sysdinie90No ratings yet
- Unidrive M Modular Drives v01 - 0 - 6Document75 pagesUnidrive M Modular Drives v01 - 0 - 6Dave CárdenasNo ratings yet
- PPTDocument33 pagesPPTPrathap VuyyuruNo ratings yet
- A Study On The Usage of CDA in EMTP SimulationsDocument6 pagesA Study On The Usage of CDA in EMTP SimulationsalpcruzNo ratings yet
- Compact Dualoutput Inverter Based On Flyingcapacitor Modelling Control and Prototype ValidationDocument8 pagesCompact Dualoutput Inverter Based On Flyingcapacitor Modelling Control and Prototype ValidationkhasimNo ratings yet
- Esign and Construction of A 5kva Automatic Voltage StabilizerDocument10 pagesEsign and Construction of A 5kva Automatic Voltage StabilizerLevinho MillsNo ratings yet
- Department of Mechatronics Engineering University of Engineering and Technology, PeshawarDocument3 pagesDepartment of Mechatronics Engineering University of Engineering and Technology, PeshawarAbdul Moiz QarniNo ratings yet
- Python Programming 2nd EditionDocument106 pagesPython Programming 2nd Editionshivanand_shettennav100% (1)
- Mini ProjectDocument33 pagesMini ProjectMeenakshi ChaudhariNo ratings yet
- Presentation - Presentation: DC To DC ConverterDocument20 pagesPresentation - Presentation: DC To DC ConverterDev Kumar100% (2)
- Pcratb PDFDocument1 pagePcratb PDFPablo RagoNo ratings yet
- 12V To 120V Inverter: Home Circuits Power SupplyDocument4 pages12V To 120V Inverter: Home Circuits Power SupplyKrishna ChaitanyaNo ratings yet
- Speed Control of DC Motor Using Chopper: Presented byDocument17 pagesSpeed Control of DC Motor Using Chopper: Presented bydeviselva75No ratings yet
- Especial Kolar 01620746Document7 pagesEspecial Kolar 01620746BiNo ratings yet
- Physics Investigatory Project: by Tarun Singh of XII B, Manav Rachna International SchoolDocument11 pagesPhysics Investigatory Project: by Tarun Singh of XII B, Manav Rachna International SchoolRishika VijayNo ratings yet
- Bidirectional Flyback Inverter WithDocument5 pagesBidirectional Flyback Inverter WithArceu CamposNo ratings yet
- Power Electronics, Smart Grid and Renewable Energy SystemsDocument8 pagesPower Electronics, Smart Grid and Renewable Energy SystemsLuis Angel Garcia ReyesNo ratings yet
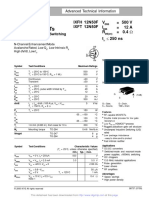
- Hiperrf Power Mosfets: Ixfh 12N50F Ixft 12N50FDocument2 pagesHiperrf Power Mosfets: Ixfh 12N50F Ixft 12N50FdtramirNo ratings yet
- IP5A (5.5 2800KW) Part List - 100827Document35 pagesIP5A (5.5 2800KW) Part List - 100827cocodrilo360No ratings yet
- Power Electronics Lecture NotesDocument12 pagesPower Electronics Lecture NotesFady KamilNo ratings yet
- ECE 121 Lecture 2Document28 pagesECE 121 Lecture 2Bassant AbdelkareemNo ratings yet
- Lab ManualDocument46 pagesLab ManualSaurabhYadavNo ratings yet
- Performance Study of Grid Connected PMSG Based Wind Turbine SystemDocument4 pagesPerformance Study of Grid Connected PMSG Based Wind Turbine SystemDjedidi Med RiadhNo ratings yet