You might also like
- Applicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksDocument19 pagesApplicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksNicholas FeatherstonNo ratings yet
- Verification of Dual Port RAM Using System Verilog and UVM: A ReviewDocument6 pagesVerification of Dual Port RAM Using System Verilog and UVM: A ReviewIJRASETPublicationsNo ratings yet
- This Study Resource Was Shared Via: Title Submission: Sept 25 (Next Week) Presentations: Oct 2 (Next AI Class)Document5 pagesThis Study Resource Was Shared Via: Title Submission: Sept 25 (Next Week) Presentations: Oct 2 (Next AI Class)Saad khalilNo ratings yet
- Offshore Asset Integrity ManagementDocument5 pagesOffshore Asset Integrity Managementamr habibNo ratings yet
- Distributed Process Control ReportFrom EverandDistributed Process Control ReportNo ratings yet
- Eew130c1 - Alr-73 VDocument5 pagesEew130c1 - Alr-73 V1310419775No ratings yet
- By: PIYUSH (00771153107) UDIT (0791153107)Document14 pagesBy: PIYUSH (00771153107) UDIT (0791153107)Dikul SinghNo ratings yet
- Rough Reor 2022sDocument5 pagesRough Reor 2022sAndrew MisianiNo ratings yet
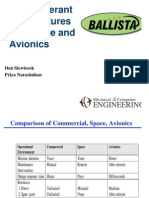
- Fault Tolerant Architectures For Space and Avionics: EngineeringDocument25 pagesFault Tolerant Architectures For Space and Avionics: Engineeringkikim93No ratings yet
- Algorithms and Sensors For Small Robot Path FollowingDocument8 pagesAlgorithms and Sensors For Small Robot Path Followingltve20ee142No ratings yet
- Paper - Prasentation - RewritingDocument3 pagesPaper - Prasentation - RewritingabhishekNo ratings yet
- An Introduction To Networked Control SystemsDocument11 pagesAn Introduction To Networked Control SystemsleidieuNo ratings yet
- The Development of A Modular DGPS SystemDocument9 pagesThe Development of A Modular DGPS Systemjavaid AliNo ratings yet
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipFrom EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipNo ratings yet
- Mambo U 2015Document5 pagesMambo U 2015muhamad saipudinNo ratings yet
- Advanced Fault Analysis Software System (Or AFAS) For Distribution Power SystemsDocument49 pagesAdvanced Fault Analysis Software System (Or AFAS) For Distribution Power SystemsAshok KumarNo ratings yet
- Satrack PPT 1Document14 pagesSatrack PPT 1Sharad MudgalNo ratings yet
- Research and Design of Space-Sky-Ground Integrated Transmission Line Inspection Platform Based On Artificial IntelligenceDocument4 pagesResearch and Design of Space-Sky-Ground Integrated Transmission Line Inspection Platform Based On Artificial Intelligencedavid CameloNo ratings yet
- Vision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied EnvironmentsDocument6 pagesVision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied Environmentsp_p9No ratings yet
- Implementation of The CA-CFAR Algorithm For PulsedDocument8 pagesImplementation of The CA-CFAR Algorithm For PulsedTanuja TanuNo ratings yet
- Aer715 - Fall 2015 QuizDocument5 pagesAer715 - Fall 2015 QuizGaurang KotasthaneNo ratings yet
- Plugin ISER 02Document10 pagesPlugin ISER 02Al WasimNo ratings yet
- 03 DevelopmentDocument32 pages03 DevelopmentMehul MakwanNo ratings yet
- Jsir 68 (10) 858-860Document3 pagesJsir 68 (10) 858-860Mohamed BelaounNo ratings yet
- Week 08 - CDH SubsystemDocument18 pagesWeek 08 - CDH Subsystemcoolgirl2611No ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document9 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- Implementation of Smart Safety Helmet For Coal Mine WorkersDocument3 pagesImplementation of Smart Safety Helmet For Coal Mine WorkersSulthaniya BeeviNo ratings yet
- Apy 3Document11 pagesApy 3SzERGNo ratings yet
- Fault Classification and Detection in Wind Turbine Using Cuckoo-Optimized Support Vector MachineDocument9 pagesFault Classification and Detection in Wind Turbine Using Cuckoo-Optimized Support Vector MachineMahdi HERMASSINo ratings yet
- EasysDocument13 pagesEasysPaschal AbarahNo ratings yet
- Preliminary Design Review - Team OrionDocument60 pagesPreliminary Design Review - Team OrionWEI JIANG NGNo ratings yet
- Cyber-Physical System Architecture For Machining Production LineDocument5 pagesCyber-Physical System Architecture For Machining Production LineMathew ChackoNo ratings yet
- MDIw MTQ5 OADocument5 pagesMDIw MTQ5 OAPandurang GurakheNo ratings yet
- Airborne Radar Clutter Simulation Using GPU (CUDA)Document6 pagesAirborne Radar Clutter Simulation Using GPU (CUDA)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Autonomous Obstacle Avoidance and Maneuvering On A Vision-GuidedDocument6 pagesAutonomous Obstacle Avoidance and Maneuvering On A Vision-GuidedJose MontesNo ratings yet
- GE-Challenges and Lessons Learned From The Design and Implementation of An IEC 61850-90-5 Based Synchrophasor System-Georgia Tech Conference (GOOD)Document10 pagesGE-Challenges and Lessons Learned From The Design and Implementation of An IEC 61850-90-5 Based Synchrophasor System-Georgia Tech Conference (GOOD)Gustavo AguayoNo ratings yet
- Seminar IeeeDocument6 pagesSeminar IeeenikhiNo ratings yet
- Analysis of Middleware and ADRC Based Techniques For Networked Control SystemsDocument6 pagesAnalysis of Middleware and ADRC Based Techniques For Networked Control SystemsUzairtahir77No ratings yet
- Model-Based Programming of Intelligent Embedded Systems Through Offline CompilationDocument4 pagesModel-Based Programming of Intelligent Embedded Systems Through Offline Compilationsurendiran123No ratings yet
- Energy-Efficient Surveillance System Using Wireless Sensor NetworksDocument14 pagesEnergy-Efficient Surveillance System Using Wireless Sensor NetworksAbel BhuNo ratings yet
- Offshore Asset Integrity ManagementDocument5 pagesOffshore Asset Integrity ManagementyogolainNo ratings yet
- Low Cost AvDocument5 pagesLow Cost AvrahulsundaresanNo ratings yet
- Accurate, Low-Latency Visual Perception For Autonomous Racing: Challenges, Mechanisms, and Practical SolutionsDocument7 pagesAccurate, Low-Latency Visual Perception For Autonomous Racing: Challenges, Mechanisms, and Practical SolutionsDanika ShrivastavaNo ratings yet
- Maze Solving Quad Rotor PDFDocument18 pagesMaze Solving Quad Rotor PDFVartolomeiDumitruNo ratings yet
- Batch I ListofprojectsforuniversitiesDocument58 pagesBatch I ListofprojectsforuniversitiesUsama JavedNo ratings yet
- A Data Analytic Approach To Automatic Fault Diagnosis and Prognosis For Distribution AutomationDocument9 pagesA Data Analytic Approach To Automatic Fault Diagnosis and Prognosis For Distribution AutomationPriya SaravananNo ratings yet
- CIGRE Artificial Intelligence Applied To Explore The Causes of Transmission Line FaultsDocument9 pagesCIGRE Artificial Intelligence Applied To Explore The Causes of Transmission Line FaultsMalik Shoaib khalidNo ratings yet
- Amsar A European Active Antenna Radar Programme: P.Lacomme" R. Gotz B. GB - Fisher H.HommelDocument6 pagesAmsar A European Active Antenna Radar Programme: P.Lacomme" R. Gotz B. GB - Fisher H.HommelAnnisa SalsabellaNo ratings yet
- Mini Project ON Air Borne Radar: Department of Electronics and CommunicationDocument22 pagesMini Project ON Air Borne Radar: Department of Electronics and CommunicationRaj GoswamiNo ratings yet
- Considerations and Benefits of Using Five Zones For Distance ProtectionDocument12 pagesConsiderations and Benefits of Using Five Zones For Distance ProtectionSrinivasan SriniNo ratings yet
- Marlee Chong Gps Slide DeckDocument58 pagesMarlee Chong Gps Slide DeckandrianNo ratings yet
- A Low Cost, Open-Architecture-Based System Satellite Telemetry & ControlDocument8 pagesA Low Cost, Open-Architecture-Based System Satellite Telemetry & ControlNile PheronNo ratings yet
- Skill Lab & Project-1: Dynamic Analysis of Structural Health Monitoring of Suspension BridgeDocument7 pagesSkill Lab & Project-1: Dynamic Analysis of Structural Health Monitoring of Suspension BridgePratik Kumar PatraNo ratings yet
- IJESI B031205013 Design Elements For TTC Nigeri SatelliteDocument10 pagesIJESI B031205013 Design Elements For TTC Nigeri SatelliteMəcid ƏliyevNo ratings yet
- Schmidt, G. T. (2010) - INSGPS Technology TrendsDocument23 pagesSchmidt, G. T. (2010) - INSGPS Technology TrendsFísica La SalleNo ratings yet
- Hoffmann Et Al Quadrotor DASC04Document10 pagesHoffmann Et Al Quadrotor DASC04Damian ChmielewskiNo ratings yet
- Lidar Report and SpecificationsDocument5 pagesLidar Report and SpecificationsFernando NunezNo ratings yet
- Road Detection Algorithm for an Autonomous UGV based on Monocular Vision (科研通-ablesci.com)Document7 pagesRoad Detection Algorithm for an Autonomous UGV based on Monocular Vision (科研通-ablesci.com)crise yangNo ratings yet
- Challenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemDocument8 pagesChallenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemGelareh ShefaeiNo ratings yet
- Radio Network Planning and Optimisation for UMTSFrom EverandRadio Network Planning and Optimisation for UMTSJaana LaihoRating: 4.5 out of 5 stars4.5/5 (2)
- Lec 9Document51 pagesLec 9Saad khalilNo ratings yet
- RoboMaster 2018 Rules ManualV1.1Document127 pagesRoboMaster 2018 Rules ManualV1.1Saad khalilNo ratings yet
- Smart Home Energy Management System Monitoring and Control of Appliances Using An Arduino Based Network in The Context of A Micro GridDocument69 pagesSmart Home Energy Management System Monitoring and Control of Appliances Using An Arduino Based Network in The Context of A Micro GridJagabandhu Kar0% (1)
- Engineering PreparingPaperIEEE Sept15Document38 pagesEngineering PreparingPaperIEEE Sept15SivaNo ratings yet
- Dji Robomaster Ai Challenge Technical ReportDocument10 pagesDji Robomaster Ai Challenge Technical ReportSaad khalilNo ratings yet
- Machine Vision Toolbox For MATLAB PDFDocument242 pagesMachine Vision Toolbox For MATLAB PDFAnderson HenriqueNo ratings yet
- Cs 2010Document24 pagesCs 2010Saad khalilNo ratings yet
- Dgca Module 1302 Feb 2018Document6 pagesDgca Module 1302 Feb 2018momenNo ratings yet
- B737 800 ChecklistsDocument2 pagesB737 800 ChecklistslebanzayNo ratings yet
- Genesys System55xDocument2 pagesGenesys System55xohm3011No ratings yet
- Honda WRV Brochure PDFDocument10 pagesHonda WRV Brochure PDFNarayan KardileNo ratings yet
- V5 Crônica ProntaDocument44 pagesV5 Crônica ProntaAlly100% (2)
- Tugas Mata Kuliah Bahasa Asing I " Gps System ": Disusun OlehDocument8 pagesTugas Mata Kuliah Bahasa Asing I " Gps System ": Disusun Olehgede artah arthaNo ratings yet
- Auto Drive PDFDocument9 pagesAuto Drive PDFChris LeybaNo ratings yet
- Scout Gps Link: IntroducingDocument3 pagesScout Gps Link: IntroducingIvanNo ratings yet
- On: Google Self Driving CarDocument21 pagesOn: Google Self Driving CarСергейNo ratings yet
- Zed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsDocument2 pagesZed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsStevan ZupunskiNo ratings yet
- Navigation SystemDocument22 pagesNavigation System19MCE24 Poovendhan VNo ratings yet
- Glass CockpitDocument4 pagesGlass CockpitLiam StonemanNo ratings yet
- Magneti Marelli Rt6 ManualDocument3 pagesMagneti Marelli Rt6 ManualRenato M Faria0% (3)
- EN - 20230629-FJD AT2 Auto Steer System-BrochureDocument4 pagesEN - 20230629-FJD AT2 Auto Steer System-BrochurekiblatagronusantaraNo ratings yet
- 2021 Corolla Hatchback PDFDocument8 pages2021 Corolla Hatchback PDFvipereejayNo ratings yet
- On Road Vehicle Breakdown Assistant: Arpit Gupta, Harshit Gupta, Prateek Rathore, Sohan Sharma, Ramander SinghDocument5 pagesOn Road Vehicle Breakdown Assistant: Arpit Gupta, Harshit Gupta, Prateek Rathore, Sohan Sharma, Ramander Singhshital shermaleNo ratings yet
- 25 The Navigating Bridge PDFDocument7 pages25 The Navigating Bridge PDFtchepssilveiraNo ratings yet
- A109S Grand Tech SpecDocument9 pagesA109S Grand Tech SpecAlphard DarmawanNo ratings yet
- 3.3 Onshore-Offshore Equipment TablesDocument3 pages3.3 Onshore-Offshore Equipment TablesGilbert NdibeNo ratings yet
- BRP Rotax 4-TEC 150 ECT User Manual ENDocument30 pagesBRP Rotax 4-TEC 150 ECT User Manual ENJohn WalesNo ratings yet
- Checklist Embraer 110Document2 pagesChecklist Embraer 110fredmnNo ratings yet
- Adx Duo: Independent Ppu For Navigating in Confined WatersDocument2 pagesAdx Duo: Independent Ppu For Navigating in Confined WatersHakim HaddouchiNo ratings yet
- Autonomous VehiclesDocument19 pagesAutonomous VehiclesSuprithaNo ratings yet
- X&M Geological Supply Catalogue (Exploration and Mining Suppliers)Document14 pagesX&M Geological Supply Catalogue (Exploration and Mining Suppliers)Stanislas De StabenrathNo ratings yet
- Global Positioning System: by Chiraag KisaniDocument19 pagesGlobal Positioning System: by Chiraag KisaniChiraag KisaniNo ratings yet
- 016-0190-086-A - SmarTrax - GVM Predator 8245 - Installation Manual PDFDocument20 pages016-0190-086-A - SmarTrax - GVM Predator 8245 - Installation Manual PDFJessé JoabeNo ratings yet
- Carsharing SolutionsDocument8 pagesCarsharing Solutionsmohamed.khalidNo ratings yet
- Android Torque Pro (OBD 2 & Car) V1.8.56Document2 pagesAndroid Torque Pro (OBD 2 & Car) V1.8.56soltani0% (1)
- Glink Tracking and Fuel Monitoring Presentation PDFDocument20 pagesGlink Tracking and Fuel Monitoring Presentation PDFaugusto100% (1)
- Omni Product CatalogueDocument30 pagesOmni Product CatalogueFrancisco VergaraNo ratings yet