You might also like
- Simovert Masterdrives VCDocument16 pagesSimovert Masterdrives VCangeljavier9No ratings yet
- 9355 30kVA Service Manual - A02Document294 pages9355 30kVA Service Manual - A02Fidel Arroyo69% (13)
- Harmonics ReportDocument57 pagesHarmonics ReportNitesh Mehta100% (1)
- Conducted EMI Simulation of Switched Mode PDFDocument6 pagesConducted EMI Simulation of Switched Mode PDFPrabhu KumaraswamyNo ratings yet
- Manual Heart Interface Freedom 25Document40 pagesManual Heart Interface Freedom 25Jason Strucinski100% (5)
- IEA Grid Connected PV Power Systems PDFDocument64 pagesIEA Grid Connected PV Power Systems PDFces.alexander.cvNo ratings yet
- VRV Technical SpecificationDocument7 pagesVRV Technical Specificationdheerajdorlikar100% (2)
- ARD Manual (English)Document3 pagesARD Manual (English)Habibulla Bavaji100% (6)
- Electromagnetic Interference EMIDocument16 pagesElectromagnetic Interference EMIErnesto Vergara Jr.No ratings yet
- Enhance Power Quality Through Series Compensation in Power SystemDocument10 pagesEnhance Power Quality Through Series Compensation in Power SystemIJRASETPublicationsNo ratings yet
- Suppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterDocument7 pagesSuppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterFaissal RachmanNo ratings yet
- IEEE 3002 by AkshayDocument24 pagesIEEE 3002 by AkshayShishpal Singh NegiNo ratings yet
- Analysis and Study of Harmonics Reduction by Using Passive Harmonics FilterDocument7 pagesAnalysis and Study of Harmonics Reduction by Using Passive Harmonics FilterIJRASETPublicationsNo ratings yet
- Active Power Filters For Harmonic Elimination and Power Quality ImprovementDocument23 pagesActive Power Filters For Harmonic Elimination and Power Quality Improvementsvhanu4010No ratings yet
- An Application Study About SMPS Design and Reduction of Common Mode NoisesDocument6 pagesAn Application Study About SMPS Design and Reduction of Common Mode Noiseshrehman65No ratings yet
- Power Quality Improvement by Shunt Active Performance Filters Emulated by Artificial Intelligence TechniquesDocument5 pagesPower Quality Improvement by Shunt Active Performance Filters Emulated by Artificial Intelligence TechniquesBlahNo ratings yet
- Optimization Method of EMI Power Filters and Its MeasurementDocument4 pagesOptimization Method of EMI Power Filters and Its MeasurementsridharprateepNo ratings yet
- Implementation of A Passive Tune Filter To Reduce Harmonics in Single Phase Induction Motor With Varying LoadDocument5 pagesImplementation of A Passive Tune Filter To Reduce Harmonics in Single Phase Induction Motor With Varying LoadDerrick RamosNo ratings yet
- HarmonicsDocument4 pagesHarmonicssoheilhamedNo ratings yet
- FullTextDocument6 pagesFullTextDobaNo ratings yet
- WeG4-2Document6 pagesWeG4-2Gago YesaeanNo ratings yet
- Harmonic ProposalDocument5 pagesHarmonic ProposalAung MyatNo ratings yet
- Modeling Electromagnetic Interference Research on Electrical SystemsDocument4 pagesModeling Electromagnetic Interference Research on Electrical SystemsjaynepalNo ratings yet
- Reduced Switch Count Inverter Supplies Two AC Loads with Different FrequenciesDocument70 pagesReduced Switch Count Inverter Supplies Two AC Loads with Different FrequenciesYellaturi Siva Kishore ReddyNo ratings yet
- Emi-Free DC-DC Buck Converter For AerospaceDocument4 pagesEmi-Free DC-DC Buck Converter For AerospaceInternational Journal of Research in Engineering and TechnologyNo ratings yet
- ZliuDocument72 pagesZliuprakhar agrawalNo ratings yet
- Simulation by MATLAB Simulink of ActiveDocument8 pagesSimulation by MATLAB Simulink of ActiveMuhammed GüvenNo ratings yet
- Design and Installation of Passive Power Filter For Grid-ConnectedDocument6 pagesDesign and Installation of Passive Power Filter For Grid-ConnectedHARMET UP3 PEMATANGSIANTARNo ratings yet
- Investigation of Harmonic Current Source Effects On Distribution and Transmission Lines Capacity and Losses: Case StudyDocument5 pagesInvestigation of Harmonic Current Source Effects On Distribution and Transmission Lines Capacity and Losses: Case Studyawan_krNo ratings yet
- Characterization of Induced Surges Impulses and Their Generation in LaboratoryDocument6 pagesCharacterization of Induced Surges Impulses and Their Generation in LaboratoryPLAKAR 2018No ratings yet
- Harmonic Mitigation Using Hybrid Filters-2014Document4 pagesHarmonic Mitigation Using Hybrid Filters-2014DanielAlejandroRamosQueroNo ratings yet
- Electronics 08 00169Document32 pagesElectronics 08 00169Tung ManhNo ratings yet
- Delivering Clean and Pure Power: Active Power Filters As A Solution To Power Quality Problems in Distribution NetworksDocument9 pagesDelivering Clean and Pure Power: Active Power Filters As A Solution To Power Quality Problems in Distribution NetworksultratoughNo ratings yet
- An-9019 Motor Drive System Using SPM InverterDocument25 pagesAn-9019 Motor Drive System Using SPM InverterasokanenNo ratings yet
- Analysis of Electromagnetic Interface Filters For Power Systems and TelephoneDocument5 pagesAnalysis of Electromagnetic Interface Filters For Power Systems and Telephonekushil1998No ratings yet
- PLL Based Shunt Active Harmonic Filter To Compensate Multiple Non-Linear LoadsDocument8 pagesPLL Based Shunt Active Harmonic Filter To Compensate Multiple Non-Linear LoadsIAEME PublicationNo ratings yet
- My PaperDocument6 pagesMy PaperCitharth MagendranNo ratings yet
- ZD05050217220 PDFDocument4 pagesZD05050217220 PDFAJER JOURNALNo ratings yet
- An Innovative EMI Reduction Design Technique in Power ConvertersDocument9 pagesAn Innovative EMI Reduction Design Technique in Power ConvertersOsman T.No ratings yet
- Jasr, 1 (7), PP 366-375Document12 pagesJasr, 1 (7), PP 366-375osamaNo ratings yet
- EMC Issues in Cars With Electric Drives: S. Guttowski, S. Weber, E. Hoene, W. John, H. ReichlDocument6 pagesEMC Issues in Cars With Electric Drives: S. Guttowski, S. Weber, E. Hoene, W. John, H. ReichlVito LNo ratings yet
- VDF CableDocument27 pagesVDF CableENSERZA1No ratings yet
- Short Circuit Analysis of 33/11/0.4 KV Distribution System Using ETAPDocument8 pagesShort Circuit Analysis of 33/11/0.4 KV Distribution System Using ETAPEmre MetinNo ratings yet
- Ijpelec040304 LomiDocument17 pagesIjpelec040304 Lomiawan_krNo ratings yet
- Jemal ProposalDocument18 pagesJemal ProposalJemal BeyanNo ratings yet
- RPallas Article 2003 1Document6 pagesRPallas Article 2003 1Talles JesusNo ratings yet
- Harmonic Mitigation Using Single Phase Shunt Active Power Filter With Fuzzy Logic Controller For The Improvement of Power QualityDocument6 pagesHarmonic Mitigation Using Single Phase Shunt Active Power Filter With Fuzzy Logic Controller For The Improvement of Power QualityMadhumitha RajasekaranNo ratings yet
- Loop Distribution System PlanningDocument6 pagesLoop Distribution System Planninglbk50No ratings yet
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDocument16 pagesOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm Optimizationsabarullah haliNo ratings yet
- An Adaptive Hysteresis Band Current Controller For Shunt Active Power FilterDocument7 pagesAn Adaptive Hysteresis Band Current Controller For Shunt Active Power Filterherdal TedongmoNo ratings yet
- Management of Transformer Condition Monitoring DataDocument47 pagesManagement of Transformer Condition Monitoring DataChalakkal JerinNo ratings yet
- Active Power Filter: Review of Converter Topologies and Control StrategiesDocument8 pagesActive Power Filter: Review of Converter Topologies and Control StrategiesNavanath MahadikNo ratings yet
- Ec2254 - Linear Integrated Circuits and Applications: Two Mark Questions and AnswersDocument27 pagesEc2254 - Linear Integrated Circuits and Applications: Two Mark Questions and AnswersSairam SairamNo ratings yet
- Conducted Electromagnetic Emissions Analysis in Grid-Tied PV SystemDocument4 pagesConducted Electromagnetic Emissions Analysis in Grid-Tied PV SystemskrtamilNo ratings yet
- Three-Phase Three-Level Inverter Based Shunt Active Power FilterDocument6 pagesThree-Phase Three-Level Inverter Based Shunt Active Power FilterEdsonNo ratings yet
- Chapter 4 Distribution SystemDocument103 pagesChapter 4 Distribution SystemDanieal HakimNo ratings yet
- Ieee Paper UietDocument6 pagesIeee Paper UietAadesh AryaNo ratings yet
- Voltage Analysis of Distribution Systems With DFIG Wind TurbinesDocument6 pagesVoltage Analysis of Distribution Systems With DFIG Wind TurbinesNirneya GuptaNo ratings yet
- Detection and Analysis of Power Quality Disturbances Under Faulty Conditions in ElectricalDocument12 pagesDetection and Analysis of Power Quality Disturbances Under Faulty Conditions in ElectricalIAEME PublicationNo ratings yet
- Energies: EMC Component Modeling and System-Level Simulations of Power Converters: AC Motor DrivesDocument22 pagesEnergies: EMC Component Modeling and System-Level Simulations of Power Converters: AC Motor DrivesKhởi NguyễnNo ratings yet
- Handling Out of PQIDocument21 pagesHandling Out of PQIShandi Cah YuhuiNo ratings yet
- An Algorithm For Transmission Distance Relay Setting Calculation Under Network Topology ChangeDocument6 pagesAn Algorithm For Transmission Distance Relay Setting Calculation Under Network Topology ChangeUrfan AshrafNo ratings yet
- Jun 2021 J. Phys. Conf. Ser. 1974 012004Document7 pagesJun 2021 J. Phys. Conf. Ser. 1974 012004PrashantNo ratings yet
- Fault Detection and Diagnostics For Non-Intrusive Monitoring Using Motor HarmonicsDocument9 pagesFault Detection and Diagnostics For Non-Intrusive Monitoring Using Motor HarmonicsSumon DharaNo ratings yet
- Optimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorDocument11 pagesOptimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorakhilnandanNo ratings yet
- Revision of Per Unit SystemDocument14 pagesRevision of Per Unit SystemYaraNo ratings yet
- PMTDocument2 pagesPMTYaraNo ratings yet
- Part 4 Example 68.3 generator linearized modelDocument5 pagesPart 4 Example 68.3 generator linearized modelYaraNo ratings yet
- E' Is The Constant Internal Voltage of The GeneratorDocument1 pageE' Is The Constant Internal Voltage of The GeneratorYaraNo ratings yet
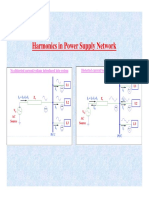
- Harmonics in Power Supply NetworkDocument2 pagesHarmonics in Power Supply NetworkYaraNo ratings yet
- Revision of Transformers PDFDocument6 pagesRevision of Transformers PDFYaraNo ratings yet
- DC Machines Problem Set SolutionsDocument2 pagesDC Machines Problem Set SolutionsYaraNo ratings yet
- Assignment For EE 6503 (Part 2, Test: Chapter 1 + Chapter 2+ Chapter 3)Document3 pagesAssignment For EE 6503 (Part 2, Test: Chapter 1 + Chapter 2+ Chapter 3)YaraNo ratings yet
- NTU EE6508 Power Quality Quiz SolutionsDocument2 pagesNTU EE6508 Power Quality Quiz SolutionsYaraNo ratings yet
- Problem Set CombinedDocument8 pagesProblem Set CombinedYaraNo ratings yet
- Problem Set 1 Magnetic CircuitsDocument3 pagesProblem Set 1 Magnetic CircuitsYaraNo ratings yet
- Harmonics in Power Supply NetworkDocument2 pagesHarmonics in Power Supply NetworkYaraNo ratings yet
- PWM Inverters Using Split-Wound Coupled Inductors PDFDocument9 pagesPWM Inverters Using Split-Wound Coupled Inductors PDFYaraNo ratings yet
- Problem Set 2Document3 pagesProblem Set 2YaraNo ratings yet
- Firstreview Draft2Document8 pagesFirstreview Draft2YaraNo ratings yet
- Second Review - Draft2Document24 pagesSecond Review - Draft2YaraNo ratings yet
- s8050 PDFDocument2 pagess8050 PDFYaraNo ratings yet
- CHB With Reduced Switches PDFDocument5 pagesCHB With Reduced Switches PDFYaraNo ratings yet
- Small-Signal Discrete-Time Modeling of Digitally Controlled PWM Converters PDFDocument5 pagesSmall-Signal Discrete-Time Modeling of Digitally Controlled PWM Converters PDFYaraNo ratings yet
- Mini Project focuses on Muffler RedesignDocument21 pagesMini Project focuses on Muffler RedesignYaraNo ratings yet
- Firstreview DraftDocument3 pagesFirstreview DraftYaraNo ratings yet
- Strong Fet™ Irfb7546Pbf: Application V 60V R Typ. 6.0M Max 7.3M I 75ADocument10 pagesStrong Fet™ Irfb7546Pbf: Application V 60V R Typ. 6.0M Max 7.3M I 75AYaraNo ratings yet
- SB120, SB130, SB140, SB150, SB160: Vishay General SemiconductorDocument4 pagesSB120, SB130, SB140, SB150, SB160: Vishay General SemiconductorYaraNo ratings yet
- BJT Actual PDFDocument2 pagesBJT Actual PDFYaraNo ratings yet
- Miniature Aluminum Electrolytic Capacitors: SeriesDocument4 pagesMiniature Aluminum Electrolytic Capacitors: SeriesYaraNo ratings yet
- S8550Document4 pagesS8550mnperales9108No ratings yet
- 7 Level Inverter Reduces Switches & THDDocument1 page7 Level Inverter Reduces Switches & THDYaraNo ratings yet
- P6KE6.8A Series 600 Watt Peak Power Surmetict-40 Transient Voltage SuppressorsDocument5 pagesP6KE6.8A Series 600 Watt Peak Power Surmetict-40 Transient Voltage SuppressorsYaraNo ratings yet
- Size E25 - 3 or 1 Outputs: 5+12/12V or 24V - Flyback TransformerDocument1 pageSize E25 - 3 or 1 Outputs: 5+12/12V or 24V - Flyback TransformerYaraNo ratings yet
- Aluminum Electrolytic Capacitors Radial Lead Type ADocument12 pagesAluminum Electrolytic Capacitors Radial Lead Type AYaraNo ratings yet
- Shahbaz Research Paper Fcs MPCDocument6 pagesShahbaz Research Paper Fcs MPCMurtaza ALI KhooharoNo ratings yet
- Microchip LLCDocument58 pagesMicrochip LLCSridhar MNo ratings yet
- Fronius IG Plus InverterDocument2 pagesFronius IG Plus InverterJie RongNo ratings yet
- Single-phase half-bridge inverter overviewDocument29 pagesSingle-phase half-bridge inverter overviewSwati MishraNo ratings yet
- An Improved Algorithm For Photovoltaic System Sizing 2012 Energy ProcediaDocument9 pagesAn Improved Algorithm For Photovoltaic System Sizing 2012 Energy ProcediaManoj KumarNo ratings yet
- Generate Power by Walking with Foot Step Non-Conventional Energy SystemDocument4 pagesGenerate Power by Walking with Foot Step Non-Conventional Energy SystemGeeta VermaNo ratings yet
- Photovoltaic Inverters TechnologyDocument8 pagesPhotovoltaic Inverters TechnologynikunjNo ratings yet
- DInverter B To Commander SEDocument18 pagesDInverter B To Commander SESani PoulouNo ratings yet
- Newly-Constructed Simplified Single-Phase Multistring Multilevel Inverter Topology For Distributed Energy ResourcesDocument7 pagesNewly-Constructed Simplified Single-Phase Multistring Multilevel Inverter Topology For Distributed Energy ResourcesM ShakirNo ratings yet
- SUN2000 - (12KTL, 15KTL, 17KTL, 20KTL) - M0 User ManualDocument112 pagesSUN2000 - (12KTL, 15KTL, 17KTL, 20KTL) - M0 User ManualThế Thuận HồNo ratings yet
- Performance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysDocument4 pagesPerformance Analysis of Asymmetrical Cascaded H-Bridge Nine Level Inverter With Photovoltaic ArraysijsretNo ratings yet
- Infini 3-10KW Hybrid InvertersDocument2 pagesInfini 3-10KW Hybrid InvertersZamran GillNo ratings yet
- Elias, Habtamu and HunegnawDocument28 pagesElias, Habtamu and HunegnaweliasNo ratings yet
- Mini Offline UPSDocument13 pagesMini Offline UPSGadhiya KhimjiNo ratings yet
- 2016 Eu Rac CTLG 0205 (H)Document50 pages2016 Eu Rac CTLG 0205 (H)Ion ZabetNo ratings yet
- Preface: FR100L&FR200L For Wire Drawing MachineDocument28 pagesPreface: FR100L&FR200L For Wire Drawing MachineAch SyarifNo ratings yet
- Arduino Based V/F Drive For A Three Phase Induction Motor Using Single Phase SupplyDocument6 pagesArduino Based V/F Drive For A Three Phase Induction Motor Using Single Phase SupplyRai Nazer Hussain KharlNo ratings yet
- Logic ProbeDocument4 pagesLogic Probexj550rhsecaNo ratings yet
- Unit 2Document97 pagesUnit 2MOHAN RuttalaNo ratings yet
- Solar Powered Work-bench TableDocument12 pagesSolar Powered Work-bench TableNash Gemar Braga EvangelistaNo ratings yet
- Catalogo Inversor Solar Monofásico ABBDocument4 pagesCatalogo Inversor Solar Monofásico ABBotavioalcaldeNo ratings yet
- Catalog Bien Tan Dorna Dong San Pham DLB1Document14 pagesCatalog Bien Tan Dorna Dong San Pham DLB1hai nam tran hoangNo ratings yet
- High Frequency Off Grid 2KW-5.5KW Solar Inverter SystemDocument1 pageHigh Frequency Off Grid 2KW-5.5KW Solar Inverter SystemWET 2016No ratings yet
- Grid-Connected System: Simulation Parameters: Project: Sim 100MWDocument6 pagesGrid-Connected System: Simulation Parameters: Project: Sim 100MWrajid oumaimaNo ratings yet