You might also like
- Why surface tension is a parallel interface forceDocument13 pagesWhy surface tension is a parallel interface forcePrasanna VenkatesanNo ratings yet
- Why Is SurfaceDocument10 pagesWhy Is SurfaceGiovanniNo ratings yet
- Why Is SurfaceDocument10 pagesWhy Is SurfaceGiovanniNo ratings yet
- Why Is Surface Tension Parallel To The Surface - by Antonin MarchandDocument10 pagesWhy Is Surface Tension Parallel To The Surface - by Antonin MarchandAaryan DewanNo ratings yet
- Determination of Line Tension From The Drop Size Dependence of Contact AnglesDocument12 pagesDetermination of Line Tension From The Drop Size Dependence of Contact AnglesrmvanginkelNo ratings yet
- Extreme Damping in Compliant Composites With A Negative-Sti Ness PhaseDocument6 pagesExtreme Damping in Compliant Composites With A Negative-Sti Ness PhaseAdnan AhmedNo ratings yet
- Interaction Potential and Hopping Dynamics Governing Sliding FrictionDocument4 pagesInteraction Potential and Hopping Dynamics Governing Sliding FrictionSyd BarrettNo ratings yet
- Isotropic DefinitionDocument11 pagesIsotropic DefinitionAnaniah DuraiNo ratings yet
- Universal Constants Permittivity of Free Space Permeability of Free SpaceDocument6 pagesUniversal Constants Permittivity of Free Space Permeability of Free SpacetejaNo ratings yet
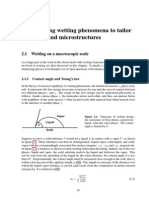
- Exploiting Wetting Phenomena To Tailor 1D Nano-And MicrostructuresDocument15 pagesExploiting Wetting Phenomena To Tailor 1D Nano-And Microstructuress1hahriarNo ratings yet
- Theory of Potential Modulation in Lateral Surface Superlattices II. Piezoelectric EffectDocument16 pagesTheory of Potential Modulation in Lateral Surface Superlattices II. Piezoelectric EffectLuu XiaoNo ratings yet
- Floating Spheres 2017 PDFDocument10 pagesFloating Spheres 2017 PDFJuan Manuel ScarpettaNo ratings yet
- Entropy: Geometric Interpretation of Surface Tension Equilibrium in Superhydrophobic SystemsDocument17 pagesEntropy: Geometric Interpretation of Surface Tension Equilibrium in Superhydrophobic SystemsZang NguyenNo ratings yet
- Relationship Between Adhesion and Friction ForcesDocument20 pagesRelationship Between Adhesion and Friction ForcesLuis Alfredo González CalderónNo ratings yet
- Ampère's Circuital Law - Wikipedia, The Free EncyclopediaDocument9 pagesAmpère's Circuital Law - Wikipedia, The Free Encyclopediabeta2009No ratings yet
- Physical Principles of Clinical Measurements 1966Document14 pagesPhysical Principles of Clinical Measurements 1966viaereaNo ratings yet
- Collective Electrostatic Repulsion Causes Colloidal Particle AttractionDocument12 pagesCollective Electrostatic Repulsion Causes Colloidal Particle AttractionNur Indah WardaniNo ratings yet
- Unsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MDocument8 pagesUnsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MSrinivas JangiliNo ratings yet
- Upscale Energy Transfer in Thick Turbulent Fluid Layers: LettersDocument5 pagesUpscale Energy Transfer in Thick Turbulent Fluid Layers: LettersTrupti DesaleNo ratings yet
- Faculty of Physics, University of Belgrade, PO Box 368, 11001 Beograd, Serbia, YugoslaviaDocument20 pagesFaculty of Physics, University of Belgrade, PO Box 368, 11001 Beograd, Serbia, YugoslaviaRiju and Psk dindigulNo ratings yet
- Static Study of Cantilever Beam Stiction Under Electrostatic Force InfluenceDocument9 pagesStatic Study of Cantilever Beam Stiction Under Electrostatic Force InfluencebillalaxmanNo ratings yet
- Ampère's Circuital LawDocument8 pagesAmpère's Circuital LawMyunghwan RyuNo ratings yet
- On Possible Role of Surface Stress in Environmentally Induced Embrittlement - Oriani - Scripta 1984Document4 pagesOn Possible Role of Surface Stress in Environmentally Induced Embrittlement - Oriani - Scripta 1984gatepreparation2012No ratings yet
- D. Weaire Et Al - Pressures in Periodic FoamsDocument12 pagesD. Weaire Et Al - Pressures in Periodic FoamsFlaoeramNo ratings yet
- Amperes Circuital LawDocument14 pagesAmperes Circuital LawMeenaChi VermaNo ratings yet
- Field Theory Concepts-Edit Part4Document10 pagesField Theory Concepts-Edit Part4teddyNo ratings yet
- Theory of Stability of Strongly Charged Lyophobic SolsDocument30 pagesTheory of Stability of Strongly Charged Lyophobic Solsivan celyNo ratings yet
- Contact AngleDocument3 pagesContact AngleIman AimanNo ratings yet
- Sartarelli Szybisz JCP132Document8 pagesSartarelli Szybisz JCP132sartarelliNo ratings yet
- Electromagnetic Theory: A. B. LahanasDocument16 pagesElectromagnetic Theory: A. B. LahanasRohit BhardwajNo ratings yet
- Maxwell's Fourth Equation and Displacement CurrentDocument11 pagesMaxwell's Fourth Equation and Displacement CurrentVenu Madhav ChittaNo ratings yet
- Slip-Line Field Theory for Metal FormingDocument14 pagesSlip-Line Field Theory for Metal FormingSri RamNo ratings yet
- Friction Through Dynamical Formation and Rupture of Molecular BondsDocument4 pagesFriction Through Dynamical Formation and Rupture of Molecular Bondshimanshujain2206No ratings yet
- Methods for Surface Free Energy DeterminationDocument44 pagesMethods for Surface Free Energy Determinationsankalp thakurNo ratings yet
- Density, Specific Weight, Specific Volume, and Specific GravityDocument11 pagesDensity, Specific Weight, Specific Volume, and Specific GravitycristyryeNo ratings yet
- Apparent Surface Free Energy of Superhydrophobic SurfacesDocument10 pagesApparent Surface Free Energy of Superhydrophobic SurfacesSiti SyahirahNo ratings yet
- Pipeline Buckling Caused by Axial LoadsDocument9 pagesPipeline Buckling Caused by Axial LoadslsatchithananthanNo ratings yet
- Theoretical Elements of Electro-Dynamic MachineryDocument116 pagesTheoretical Elements of Electro-Dynamic Machineryanonkid100% (7)
- Beer1966 - Efeito Hall e Fenomenos RelacionadosDocument13 pagesBeer1966 - Efeito Hall e Fenomenos RelacionadosRaul Fernando CuevasNo ratings yet
- Faraday's Law of Induction ExplainedDocument3 pagesFaraday's Law of Induction ExplainedmadhavNo ratings yet
- Atomic Friction PRL 2013Document4 pagesAtomic Friction PRL 2013Syd BarrettNo ratings yet
- Generating Line Spectra From Experimental Response1Document19 pagesGenerating Line Spectra From Experimental Response1MEHDI FARROKHINo ratings yet
- Stiction in MachiningDocument13 pagesStiction in MachiningwigtimeNo ratings yet
- Phelan 1996Document9 pagesPhelan 1996Franco LeónNo ratings yet
- A Tight-Binding Approach To Uniaxial Strain in GrapheneDocument9 pagesA Tight-Binding Approach To Uniaxial Strain in GrapheneNathan Scott NicholsNo ratings yet
- C1 NUS Lab ReportDocument8 pagesC1 NUS Lab ReportgvatarNo ratings yet
- Fulltext PDFDocument24 pagesFulltext PDFNaeem RehmanNo ratings yet
- Faraday's Law of InductionDocument12 pagesFaraday's Law of InductionjulianbangkaNo ratings yet
- Continuum Micro-Mechanics of Elastoplastic Polycrystals PDFDocument13 pagesContinuum Micro-Mechanics of Elastoplastic Polycrystals PDFChandra ClarkNo ratings yet
- Charges and FieldsDocument5 pagesCharges and FieldsDamian BohNo ratings yet
- Contact MechanicsDocument8 pagesContact MechanicsPourya NouryNo ratings yet
- A Comparison of The Fracture Criteria of Griffith and BarenblattDocument12 pagesA Comparison of The Fracture Criteria of Griffith and BarenblattIgnasi AliguerNo ratings yet
- Hydrostatics HydrostaticsDocument8 pagesHydrostatics HydrostaticsTempest_LNo ratings yet
- S. Doniach and D. Das - The Bose Metal - A CommentaryDocument4 pagesS. Doniach and D. Das - The Bose Metal - A CommentaryImaxSWNo ratings yet
- Strength Analysis Modelling of FlexibleDocument19 pagesStrength Analysis Modelling of Flexiblexinlin.cppNo ratings yet
- Daniel Spirn and J. Douglas Wright - Linear Dispersive Decay Estimates For Vortex Sheets With Surface TensionDocument27 pagesDaniel Spirn and J. Douglas Wright - Linear Dispersive Decay Estimates For Vortex Sheets With Surface TensionPonmijNo ratings yet
- Flag EffectDocument6 pagesFlag Effectchau nguyenNo ratings yet
- Breakup of Fluid Droplets in Electric and Magnetic Fields: by J. SherwoodDocument14 pagesBreakup of Fluid Droplets in Electric and Magnetic Fields: by J. SherwoodAkshay TelmasareNo ratings yet
- 1051ThermalRunawayandFireBehaviorsofLithiumIronPhosphateBatteryInducedbyOverheatingandOverchargingDocument22 pages1051ThermalRunawayandFireBehaviorsofLithiumIronPhosphateBatteryInducedbyOverheatingandOverchargingΤσιμπινός ΣπύροςNo ratings yet
- Vaccines Contract Between European Commission and AstraZeneca Now PublishedDocument1 pageVaccines Contract Between European Commission and AstraZeneca Now PublishedPúblico DiarioNo ratings yet
- PVsyst Tutorials V7 Grid ConnectedDocument95 pagesPVsyst Tutorials V7 Grid ConnectedJuan Carlos CondoriNo ratings yet
- PVsyst - Tutorials - V7 - Stand AloneDocument28 pagesPVsyst - Tutorials - V7 - Stand Alonemazen absiNo ratings yet
- ELEC E8409 Answers 5Document6 pagesELEC E8409 Answers 5Τσιμπινός ΣπύροςNo ratings yet
- ELEC E8409 Answers 5Document6 pagesELEC E8409 Answers 5Τσιμπινός ΣπύροςNo ratings yet
- A comprehensive insight into the thermal runaway issues in the view ofDocument16 pagesA comprehensive insight into the thermal runaway issues in the view ofΤσιμπινός ΣπύροςNo ratings yet
- ELEC E8409 Answers 5Document6 pagesELEC E8409 Answers 5Τσιμπινός ΣπύροςNo ratings yet
- PVsyst Tutorials V7 PumpingDocument22 pagesPVsyst Tutorials V7 PumpingΤσιμπινός ΣπύροςNo ratings yet
- Vaccines Contract Between European Commission and AstraZeneca Now PublishedDocument1 pageVaccines Contract Between European Commission and AstraZeneca Now PublishedPúblico DiarioNo ratings yet
- Solar Electricity Handbook - Boxwell, Michael PDFDocument1,130 pagesSolar Electricity Handbook - Boxwell, Michael PDFAddy Sandy80% (10)
- 411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Document3 pages411 Yang-An Efficient Neural Network Macro-Model For Electromagnetic Radiation Spurious Emission Ab982Τσιμπινός ΣπύροςNo ratings yet
- ΟΔΗΓΟΣ ΤΕΧΝΟΛΟΓΙΩΝ ΗΛΕΚΤΡΟΠΑΡΑΓΩΓΗΣ ΑΠΟ ΑΠΕDocument223 pagesΟΔΗΓΟΣ ΤΕΧΝΟΛΟΓΙΩΝ ΗΛΕΚΤΡΟΠΑΡΑΓΩΓΗΣ ΑΠΟ ΑΠΕVåŠîlîŠ VåmvåkØuŠîŠNo ratings yet
- Atmel AVR Micro Controller Primer - Programming and InterfacingDocument195 pagesAtmel AVR Micro Controller Primer - Programming and Interfacingjfg872189% (9)
- Coronavirus: The Commission Signs First Contract With AstrazenecaDocument2 pagesCoronavirus: The Commission Signs First Contract With AstrazenecaΤσιμπινός ΣπύροςNo ratings yet
- Questions and Answers: COVID-19 Vaccination in The EU : Brussels, 8 January 2021Document4 pagesQuestions and Answers: COVID-19 Vaccination in The EU : Brussels, 8 January 2021Τσιμπινός ΣπύροςNo ratings yet
- 410 Gao-Dgs and Fss Incorporated Emc Design and Robust Optimization A2d43Document1 page410 Gao-Dgs and Fss Incorporated Emc Design and Robust Optimization A2d43Τσιμπινός ΣπύροςNo ratings yet
- 406 Ogorman-Biaxial Material Characterization Utilizing A Focus Beam System A122dDocument4 pages406 Ogorman-Biaxial Material Characterization Utilizing A Focus Beam System A122dΤσιμπινός ΣπύροςNo ratings yet
- 347 Kamimura-Development of An Experimental System For Current Perception Acf80Document4 pages347 Kamimura-Development of An Experimental System For Current Perception Acf80Τσιμπινός ΣπύροςNo ratings yet
- 408 Nazemi-An Analytical Approach For Evaluating The Effectiveness Af427Document6 pages408 Nazemi-An Analytical Approach For Evaluating The Effectiveness Af427Τσιμπινός ΣπύροςNo ratings yet
- Sensor Uncertainty Analysis of Mimoso NarDocument6 pagesSensor Uncertainty Analysis of Mimoso NarΤσιμπινός ΣπύροςNo ratings yet
- Investigation of Communication Quality Degradation of 1000BASE-T1 by Pulse DisturbanceDocument1 pageInvestigation of Communication Quality Degradation of 1000BASE-T1 by Pulse DisturbanceΤσιμπινός ΣπύροςNo ratings yet
- 409 Kobayashi-Development of A New Broadband Antenna For Emi Measurement Usable A37ecDocument1 page409 Kobayashi-Development of A New Broadband Antenna For Emi Measurement Usable A37ecΤσιμπινός ΣπύροςNo ratings yet
- 346 Holmberg-Accurate and Efficient Crosstalk Analysis by Full-Wave Computations and System Identification A54aaDocument6 pages346 Holmberg-Accurate and Efficient Crosstalk Analysis by Full-Wave Computations and System Identification A54aaΤσιμπινός ΣπύροςNo ratings yet
- 343 Benz-Eigenmode Based Optimization of Sensors A52e0Document6 pages343 Benz-Eigenmode Based Optimization of Sensors A52e0Τσιμπινός ΣπύροςNo ratings yet
- 345 Pena-Quintal-Data Links Modelling Under Radiated Emi and Its Impact Aae39Document5 pages345 Pena-Quintal-Data Links Modelling Under Radiated Emi and Its Impact Aae39Τσιμπινός ΣπύροςNo ratings yet
- 348 Mori-Design-Oriented Emc Analysis of Wiring Systems A68c4Document6 pages348 Mori-Design-Oriented Emc Analysis of Wiring Systems A68c4Τσιμπινός ΣπύροςNo ratings yet
- 405 Schubert-One-Antenna Method With Time Domain Gating Using Equi-Ripple Fir Filter A2435Document3 pages405 Schubert-One-Antenna Method With Time Domain Gating Using Equi-Ripple Fir Filter A2435Τσιμπινός ΣπύροςNo ratings yet
- 342 Loschi-Reduction of Conducted Emissions in DCDC Converters With Fpga-Based Random Modulation A2967Document6 pages342 Loschi-Reduction of Conducted Emissions in DCDC Converters With Fpga-Based Random Modulation A2967Τσιμπινός ΣπύροςNo ratings yet
- A Reference Test Setup and Comparison Between Different HPEM Testing SchemesDocument5 pagesA Reference Test Setup and Comparison Between Different HPEM Testing SchemesΤσιμπινός ΣπύροςNo ratings yet
- Boston University Student Research: Zipcar, IncDocument28 pagesBoston University Student Research: Zipcar, Incforeverjessx3No ratings yet
- Transforming Enterprises Through Diversity and Inclusion - ILODocument124 pagesTransforming Enterprises Through Diversity and Inclusion - ILODaniela GalvisNo ratings yet
- 2 - PaintingDocument26 pages2 - PaintingELLEN MASMODINo ratings yet
- Soal B Inggris Uas KLS X OllaDocument25 pagesSoal B Inggris Uas KLS X OllaRidwan, S.Pd.,M.SiNo ratings yet
- Kerala University of Health Sciences Faculty of Dentistry BDS Course Regulations and Syllabus 2010Document125 pagesKerala University of Health Sciences Faculty of Dentistry BDS Course Regulations and Syllabus 2010Shyam KrishnanNo ratings yet
- Ethics in BankingDocument8 pagesEthics in BankingMarwa AleiaiwiNo ratings yet
- The DB2 Engine - The Life Cycle of A SQL StatementDocument70 pagesThe DB2 Engine - The Life Cycle of A SQL StatementPrashant LenkaNo ratings yet
- Chapter 22 - Futures MarketsDocument9 pagesChapter 22 - Futures MarketsminibodNo ratings yet
- LEARNERS BOOK 1 (2) ... ScienceDocument160 pagesLEARNERS BOOK 1 (2) ... SciencehussamNo ratings yet
- Mutagenic Effects of Sodium Azide On The Quality of Maize SeedsDocument7 pagesMutagenic Effects of Sodium Azide On The Quality of Maize SeedsKanhiya MahourNo ratings yet
- Sivaganga Dist-List of Polling Stations For 185-Tiruppattur Assembly ConstituencyDocument85 pagesSivaganga Dist-List of Polling Stations For 185-Tiruppattur Assembly ConstituencyGanesanNo ratings yet
- List of Intel Core I3 MicroprocessorsDocument3 pagesList of Intel Core I3 MicroprocessorsKing 79100% (1)
- Test Tenses en AnswersDocument4 pagesTest Tenses en AnswersAmit Kumar LalNo ratings yet
- Anthony Andreas Vass, Barbara Harrison Social Work Competences Core Knowledge, Values and SkillsDocument248 pagesAnthony Andreas Vass, Barbara Harrison Social Work Competences Core Knowledge, Values and SkillsAhmad Syifa100% (2)
- Background Surya NepalDocument11 pagesBackground Surya NepalUjibpradhan67% (3)
- STILREN Vase, White, 22 CM - IKEADocument9 pagesSTILREN Vase, White, 22 CM - IKEAAimi GhazaliNo ratings yet
- Arvydas Sliogeris The Thing and Art Two Essays On The Ontotopy of The Work of Art 1Document168 pagesArvydas Sliogeris The Thing and Art Two Essays On The Ontotopy of The Work of Art 1Richard OhNo ratings yet
- PBA Physics SSC-I FinalDocument7 pagesPBA Physics SSC-I Finalrayyanhashmi93No ratings yet
- WtA - 01 - Forgotten Lessons PDFDocument8 pagesWtA - 01 - Forgotten Lessons PDFHyperion DriverNo ratings yet
- SalmonellaDocument2 pagesSalmonellaAlfarizi Julistyo S.No ratings yet
- Mama and Mommy and Me in The Middle Press ReleaseDocument2 pagesMama and Mommy and Me in The Middle Press ReleaseCandlewick Press0% (1)
- Jee Advanced Sample PaperDocument24 pagesJee Advanced Sample PaperDark Knight0% (1)
- Organic ReactionsDocument73 pagesOrganic ReactionsKrishnaah Doraj100% (1)
- Lawrence Buell - in Pursuits of EthicsDocument14 pagesLawrence Buell - in Pursuits of EthicsArnaldo DonosoNo ratings yet
- On Counterfactuality: A Multimodal Approach To (Apparent) Contradictions Between Positive Statements and Gestures of NegationDocument12 pagesOn Counterfactuality: A Multimodal Approach To (Apparent) Contradictions Between Positive Statements and Gestures of NegationYulia NikolaevaNo ratings yet
- 10 1 1 125Document456 pages10 1 1 125Radu GrumezaNo ratings yet
- QuizDocument70 pagesQuizSukesh RNo ratings yet
- Voh Sham Kuch Ajeeb Thi - A Brother Sister Saga (HindiDocument403 pagesVoh Sham Kuch Ajeeb Thi - A Brother Sister Saga (HindiDesi Rocks100% (1)
- Chapter 2 Fluid StaticsDocument13 pagesChapter 2 Fluid StaticsguhanNo ratings yet
- Industrial Relations and Trade Unions MainDocument32 pagesIndustrial Relations and Trade Unions MainKishore MuppaneniNo ratings yet