You might also like
- Metacentric Height: Navigation SearchDocument6 pagesMetacentric Height: Navigation SearchShashi Kant Vashisth0% (2)
- Metacentric HeightDocument6 pagesMetacentric HeightdonprofaghatiseNo ratings yet
- Angle of LolDocument11 pagesAngle of LolNitinVanjariNo ratings yet
- Metacentric HeightDocument6 pagesMetacentric HeightKeyboardMan1960No ratings yet
- Effect of A Negative GM On A Moving ShipDocument14 pagesEffect of A Negative GM On A Moving ShipBrendan Rezz R CilotNo ratings yet
- WK 6 Topic - Parameters Related To Ship's StabilityDocument4 pagesWK 6 Topic - Parameters Related To Ship's Stabilityrainna merquitaNo ratings yet
- A Matter of Stability & TrimDocument11 pagesA Matter of Stability & TrimJia Hann TanNo ratings yet
- Weight and BuoyancyDocument28 pagesWeight and BuoyancyElmer SullonNo ratings yet
- Fundamentals of StabilityDocument17 pagesFundamentals of StabilityJoemar de la Peña50% (2)
- 1.principle of StabilityDocument24 pages1.principle of Stabilitypropulzi100% (2)
- Small Angle StabilityDocument8 pagesSmall Angle StabilityAthulRKrishnanNo ratings yet
- Centre of BuoyancyDocument4 pagesCentre of BuoyancyAnna E A. CamañoNo ratings yet
- Damagr Control Training Stability and Bouyancy LessonsDocument21 pagesDamagr Control Training Stability and Bouyancy LessonsAbdul Rosyid100% (1)
- Centre of FloatationDocument7 pagesCentre of FloatationBlack HawkNo ratings yet
- Understanding Ship Stability and Buoyancy ForcesDocument7 pagesUnderstanding Ship Stability and Buoyancy ForcesRahul Phadake100% (1)
- Damage Control TrainingDocument179 pagesDamage Control TrainingMD100% (1)
- Ship StabilityDocument13 pagesShip StabilityMarian LazarNo ratings yet
- Ensuring Excellence at Sea through Naval ArchitectureDocument21 pagesEnsuring Excellence at Sea through Naval ArchitectureNeo Miala100% (2)
- DefinitionsDocument3 pagesDefinitionsAhmed AboelmagdNo ratings yet
- Ship Stability ExplainedDocument20 pagesShip Stability ExplainedArjun Jacob100% (2)
- Week 5 OOW Transvers Statice StabilityDocument18 pagesWeek 5 OOW Transvers Statice StabilityAmin Al QawasmehNo ratings yet
- Trim and Stability Definitions of Terms UpdatedDocument5 pagesTrim and Stability Definitions of Terms UpdatedJazmin GolosoNo ratings yet
- Ship Hydrostatics - Week 1Document9 pagesShip Hydrostatics - Week 1Kristine Camille GodinezNo ratings yet
- Ship Stability - Understanding Intact Stability of Ships: Intactness of Its HullDocument30 pagesShip Stability - Understanding Intact Stability of Ships: Intactness of Its Hulllife & logicNo ratings yet
- Appendix1 Hydrostatic Conditionsof FlotationDocument3 pagesAppendix1 Hydrostatic Conditionsof FlotationJiban podderNo ratings yet
- NAME 157: Hydrostatics & StabilityDocument28 pagesNAME 157: Hydrostatics & StabilityM HASIN ISHMAM JEETNo ratings yet
- Fundamentals of Ship StabilityDocument10 pagesFundamentals of Ship StabilityHafiz MellianiNo ratings yet
- STABILITY AND TRIM DEFINITIONSDocument27 pagesSTABILITY AND TRIM DEFINITIONSДмитрий ЯрычNo ratings yet
- Range of stability angle for ships without loss of ability to right itselfDocument3 pagesRange of stability angle for ships without loss of ability to right itselfPanagiwtis M.No ratings yet
- Modeling Extreme Ship Rolling in WavesDocument27 pagesModeling Extreme Ship Rolling in WavesOscar Sacases PlanasNo ratings yet
- Stabilitas KapalDocument65 pagesStabilitas KapaltutengNo ratings yet
- Ship Hull Manual OverviewDocument31 pagesShip Hull Manual OverviewRajeev Balakrishnan100% (1)
- FloatingStructure1Class2022 #3 ShipHydrostaticDocument16 pagesFloatingStructure1Class2022 #3 ShipHydrostaticAminul Akbar AayNo ratings yet
- Matlab TutorialDocument55 pagesMatlab TutorialSahil JawaNo ratings yet
- Shipping Types EncyclopediaDocument57 pagesShipping Types EncyclopediaVinoth KumarNo ratings yet
- Naval Architecture 2Document4 pagesNaval Architecture 2HOSSAIN AL FAYSALNo ratings yet
- Ship Design Hydrostatic CurvesDocument16 pagesShip Design Hydrostatic CurvesIvan Andi PaliwanNo ratings yet
- ShipDocument88 pagesShipGiorgi KandelakiNo ratings yet
- Stability Definition (Eng)Document3 pagesStability Definition (Eng)Kononnikov Alexandr100% (1)
- Metacentic Height Lab ReportDocument2 pagesMetacentic Height Lab ReportRobyn Reynolds0% (1)
- Phase 2 Stability NotesDocument9 pagesPhase 2 Stability NotesmanNo ratings yet
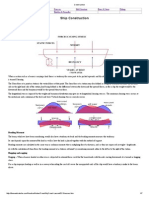
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- Fluid PresentationDocument30 pagesFluid Presentationmohammedhesham3002No ratings yet
- Hydrostatics CurvesDocument2 pagesHydrostatics CurvesjishnusajiNo ratings yet
- SEAM_M2Document8 pagesSEAM_M2Carlo ValdezNo ratings yet
- Vlaue of GMDocument1 pageVlaue of GMVignesh KumarNo ratings yet
- Introduction to Ship Design and Naval Architecture BasicsDocument79 pagesIntroduction to Ship Design and Naval Architecture BasicsRENGANATHAN PNo ratings yet
- Changes in Buoyancy and Stability due to Displacement and Weight ShiftsDocument23 pagesChanges in Buoyancy and Stability due to Displacement and Weight ShiftsKarl Jann Anonuevo100% (1)
- Construction HandoutDocument29 pagesConstruction HandoutAung Htet KyawNo ratings yet
- Stability Definitions OOW Stability v1 0Document4 pagesStability Definitions OOW Stability v1 0rohitrai88896No ratings yet
- Ship StressesDocument7 pagesShip StressesSumit Sinha50% (2)
- Understanding Heavy Lifting Operations and Vessel StabilityDocument6 pagesUnderstanding Heavy Lifting Operations and Vessel StabilityGiorgi KandelakiNo ratings yet
- Project (Sajjat Mistry For Grse)Document11 pagesProject (Sajjat Mistry For Grse)Souvik SamantaNo ratings yet
- Seam-2-Week-3-The-Fundamentals-of-Ship-Stability-Initial-Stability-nomenclature-1Document40 pagesSeam-2-Week-3-The-Fundamentals-of-Ship-Stability-Initial-Stability-nomenclature-1SM11A3 -Cabusao, Kenneth JamesNo ratings yet
- HandoutTransverse Statical StabilityDocument6 pagesHandoutTransverse Statical StabilitySamNo ratings yet
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningFrom EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningRating: 3.5 out of 5 stars3.5/5 (2)
- SSB 08 2022eDocument3 pagesSSB 08 2022eВладимир ШевченкоNo ratings yet
- VHF Fact Sheet: Marine "Very High Frequency" (VHF) Radio For Recreational BoatiesDocument5 pagesVHF Fact Sheet: Marine "Very High Frequency" (VHF) Radio For Recreational BoatiesВладимир ШевченкоNo ratings yet
- Broadcast Fax 022019Document1 pageBroadcast Fax 022019Jose Maria Garcia GarciaNo ratings yet
- MSC 1432Document12 pagesMSC 1432valentin-giuglea-343No ratings yet
- RTTY Shipping BroadcastDocument4 pagesRTTY Shipping BroadcastВладимир ШевченкоNo ratings yet
- K Chief 600 Marine Automation SystemDocument4 pagesK Chief 600 Marine Automation SystemВладимир ШевченкоNo ratings yet
- Circular #37 BNWAS - Interface With VDRs and S-VDRs v1Document5 pagesCircular #37 BNWAS - Interface With VDRs and S-VDRs v1Владимир ШевченкоNo ratings yet
- MAR 02-Ecertificates PDFDocument3 pagesMAR 02-Ecertificates PDFВладимир ШевченкоNo ratings yet
- MBSHC20-6.7 Report of NAVAREA III (Spain)Document5 pagesMBSHC20-6.7 Report of NAVAREA III (Spain)Владимир ШевченкоNo ratings yet
- MAR email addresses circularDocument2 pagesMAR email addresses circularВладимир ШевченкоNo ratings yet
- IMO Resolution VTSSDocument17 pagesIMO Resolution VTSSВладимир ШевченкоNo ratings yet
- Books: Request For Log BooksDocument1 pageBooks: Request For Log BooksВладимир ШевченкоNo ratings yet
- Belfast Harbour Navigational Guidelines - v4Document13 pagesBelfast Harbour Navigational Guidelines - v4Владимир ШевченкоNo ratings yet
- TSS PDFDocument13 pagesTSS PDFWing WingNo ratings yet
- JCO Series GMDSS ConsoleDocument4 pagesJCO Series GMDSS ConsoleВладимир ШевченкоNo ratings yet
- Ship Security Alert System ConfigurationDocument30 pagesShip Security Alert System ConfigurationFabio Marcia GrassiNo ratings yet
- 7.1 Deep-Sea Pilotage: Entering The Baltic Sea Via The Belts and The Sound (Danish Pilots)Document1 page7.1 Deep-Sea Pilotage: Entering The Baltic Sea Via The Belts and The Sound (Danish Pilots)Владимир ШевченкоNo ratings yet
- Zonestar GuideDocument59 pagesZonestar GuidepepeNo ratings yet
- PS3 Prompt Explained With Examples in LinuxDocument2 pagesPS3 Prompt Explained With Examples in LinuxSaka KelyNo ratings yet
- Current Differential Relay ManualDocument4 pagesCurrent Differential Relay Manualppraveenkumar79No ratings yet
- The Cost of Uncertainty For Nitrogen Fertilizer Management: A Sensitivity AnalysisDocument8 pagesThe Cost of Uncertainty For Nitrogen Fertilizer Management: A Sensitivity AnalysisSha-ReeNo ratings yet
- Logical Analysis of Value Concepts Like Striving, Doing, Believing and KnowingDocument9 pagesLogical Analysis of Value Concepts Like Striving, Doing, Believing and KnowingRoger EndelionNo ratings yet
- COMSATS University Islamabad, Wah Campus: FINAL Examinations Fall-2020Document2 pagesCOMSATS University Islamabad, Wah Campus: FINAL Examinations Fall-2020Esha 1277-FBAS/BSBT/F19No ratings yet
- Transformer Winding Resistance and Equivalent CircuitDocument10 pagesTransformer Winding Resistance and Equivalent CircuitM7MD ACADEMIANo ratings yet
- Pci 22 PDFDocument322 pagesPci 22 PDFAnonymous pcNdMpNENo ratings yet
- FINA 4250 Applications of Risk ModelsDocument67 pagesFINA 4250 Applications of Risk ModelsChristopherNo ratings yet
- Introductory Plasma and Fusion Physics: Majid Khan and Muhammad KamranDocument130 pagesIntroductory Plasma and Fusion Physics: Majid Khan and Muhammad Kamrannajeeb ullahNo ratings yet
- The Detection of Earnings Manipulation Messod D. BeneishDocument27 pagesThe Detection of Earnings Manipulation Messod D. BeneishOld School Value100% (13)
- Soal Am 2023 - Bahasa InggrisDocument13 pagesSoal Am 2023 - Bahasa Inggrisfarukikamal48No ratings yet
- Innermost - Main CatalogueDocument214 pagesInnermost - Main CatalogueLiteHouseNo ratings yet
- Drawing SheetsDocument11 pagesDrawing SheetsMona DiaaNo ratings yet
- Is Is at At: P,/P P, P,/PDocument4 pagesIs Is at At: P,/P P, P,/PNaqqash SajidNo ratings yet
- Sky TowerDocument19 pagesSky TowerAlcohol You LaterNo ratings yet
- CPAC 2 - Vit CDocument3 pagesCPAC 2 - Vit CNoruwa EKUASENo ratings yet
- Drowsy Driving A Look at The Monitoring and Detection SystemDocument4 pagesDrowsy Driving A Look at The Monitoring and Detection SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Locktronics Technical InformationDocument39 pagesLocktronics Technical InformationJulio Gutierrez ReyesNo ratings yet
- Srs Property Management System For ProgramersDocument16 pagesSrs Property Management System For ProgramersShah Alam100% (3)
- Methods of Analysis and Solutions of Crack ProblemsDocument562 pagesMethods of Analysis and Solutions of Crack ProblemsgedysonlimaNo ratings yet
- Lilo-An National High SchoolDocument3 pagesLilo-An National High SchoolJose Benavente100% (1)
- IADC Formula Sheet: X X X + + ÷ X + X - ÷ XDocument5 pagesIADC Formula Sheet: X X X + + ÷ X + X - ÷ XMarwa ElghifaryNo ratings yet
- Compilation of Summative Test in Math 4 Ist QuarterDocument10 pagesCompilation of Summative Test in Math 4 Ist QuarterLYNE C. KE0% (1)
- Question Answer of ComplexometryDocument19 pagesQuestion Answer of ComplexometryNahzim RahmatNo ratings yet
- SE Fly SC Plus E 150dpiDocument2 pagesSE Fly SC Plus E 150dpitun tunNo ratings yet
- Quick Disconnect Coupling DataDocument2 pagesQuick Disconnect Coupling DataEagle1968No ratings yet
- Kalaha in Java - An Experiment in Artificial Intelligence and NetworkingDocument102 pagesKalaha in Java - An Experiment in Artificial Intelligence and NetworkingapNo ratings yet
- Study of Pavement Condition Index (PCI) Relationship With International Roughness Index (IRI) On Flexible PavementDocument6 pagesStudy of Pavement Condition Index (PCI) Relationship With International Roughness Index (IRI) On Flexible Pavementsazwan2No ratings yet
- 3BSE041584-511 - En Compact Control Builder AC 800M 5.1.1 Getting StartedDocument174 pages3BSE041584-511 - En Compact Control Builder AC 800M 5.1.1 Getting StartedfranciscoproaNo ratings yet