You might also like
- Lecture 2bDocument26 pagesLecture 2bJohn HannaNo ratings yet
- Mechanical Vibration Ch-2Document73 pagesMechanical Vibration Ch-2Befikad BekeleNo ratings yet
- Classical Presentation Final For RealDocument26 pagesClassical Presentation Final For RealChad O'MeliaNo ratings yet
- Chapter 4 Free Vibrations of Undamped Sdof System 35Document10 pagesChapter 4 Free Vibrations of Undamped Sdof System 35ameena ameeraliNo ratings yet
- Screenshot 2021-03-30 at 11.54.26Document30 pagesScreenshot 2021-03-30 at 11.54.26PieterNo ratings yet
- Amplitude = √(ω02 − ω2)2 + 4Γ2ω2 ; Phase = tan−1(−2Γω/ω02 − ω2Document17 pagesAmplitude = √(ω02 − ω2)2 + 4Γ2ω2 ; Phase = tan−1(−2Γω/ω02 − ω2Rhys Lim YHNo ratings yet
- Mechanical Vibrations Week 11: Quiz 2 AnnouncementDocument10 pagesMechanical Vibrations Week 11: Quiz 2 Announcementzak masterNo ratings yet
- Module 3 - Fall 2023Document47 pagesModule 3 - Fall 2023Muhammad FahimNo ratings yet
- A4_Forced Harmonic OscillatorDocument26 pagesA4_Forced Harmonic Oscillatorf20221184No ratings yet
- Chapter 2 - 2nd Order Linear Differential Equation With Constant Coefficients - Part 2Document21 pagesChapter 2 - 2nd Order Linear Differential Equation With Constant Coefficients - Part 2Bukhari ManshoorNo ratings yet
- Document 5Document62 pagesDocument 5MUHAMMAD NUR AMNI KHARIMANNo ratings yet
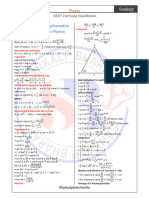
- Physics Formula Handbook (1)Document54 pagesPhysics Formula Handbook (1)3198chethaNo ratings yet
- ME2115 - Forced Vibration PDFDocument49 pagesME2115 - Forced Vibration PDFwee kian pungNo ratings yet
- Torsional Vibration HandoutsDocument3 pagesTorsional Vibration HandoutsjaycobsmillanNo ratings yet
- Soil Dynamics: CH 2: Vibration TheoryDocument22 pagesSoil Dynamics: CH 2: Vibration TheoryEntertainment GeneralNo ratings yet
- Chapter 3 - Forced-VibrationsDocument68 pagesChapter 3 - Forced-VibrationsNanang Ali SutisnaNo ratings yet
- Lecture 2Document19 pagesLecture 2Mahendra ChilakalaNo ratings yet
- Gain & Phase Margin - Bode PlotDocument28 pagesGain & Phase Margin - Bode PlotDeepthiNo ratings yet
- Week2 3Document50 pagesWeek2 3Chandrali DasNo ratings yet
- Correlation Spectral Density AM Aug 10Document8 pagesCorrelation Spectral Density AM Aug 10vishal kumarNo ratings yet
- Microwave Engineering: Name - Archana Rani Singh ROLL NO-1806106 Semester - Vi Branch - EceDocument14 pagesMicrowave Engineering: Name - Archana Rani Singh ROLL NO-1806106 Semester - Vi Branch - EceArchanaNo ratings yet
- Review Appendix A and BDocument36 pagesReview Appendix A and BAhmadSulaimanNo ratings yet
- Free Damped Vibration Response AnalysisDocument12 pagesFree Damped Vibration Response AnalysisNaveed HassanNo ratings yet
- EL5107 M1-b: Reviu Dasar Sistem KendaliDocument62 pagesEL5107 M1-b: Reviu Dasar Sistem KendaliDyah Ayu AnggreiniNo ratings yet
- Diffraction SMITDocument25 pagesDiffraction SMITRNo ratings yet
- Oscillations Jee EngDocument41 pagesOscillations Jee EngPrecious ChandaNo ratings yet
- L03 - Band Theory Using QM - 1 PDFDocument28 pagesL03 - Band Theory Using QM - 1 PDFakshat mishraNo ratings yet
- L05 Energy Band TheoryDocument16 pagesL05 Energy Band Theoryashish kumarNo ratings yet
- Chapter 1. Time - Domain Analysis of Electric Circuits PDFDocument42 pagesChapter 1. Time - Domain Analysis of Electric Circuits PDFThùy Dung Nguyễn ThịNo ratings yet
- Easy Rivision For NeetDocument54 pagesEasy Rivision For NeetRaja420No ratings yet
- Review of Linear Mechanism of Wave Emergence From Vortices in Smooth Shear FlowsDocument7 pagesReview of Linear Mechanism of Wave Emergence From Vortices in Smooth Shear FlowsJOAQUIM P JOSSYNo ratings yet
- Fyp PDFDocument66 pagesFyp PDFAnupam SonarNo ratings yet
- Solution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodDocument10 pagesSolution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodK.R.Sampath kumarNo ratings yet
- Lagrange Mechanics II: 20 February 2023Document31 pagesLagrange Mechanics II: 20 February 2023Daniel JonesNo ratings yet
- Atomic Vibrations in SolidsDocument18 pagesAtomic Vibrations in SolidsSumman IshfaqNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- ES386 Slides 06 n DOF lecture (2)Document28 pagesES386 Slides 06 n DOF lecture (2)jimawsd569No ratings yet
- 1.0 Atomic StructureDocument37 pages1.0 Atomic StructureRustin PurplemanNo ratings yet
- ME360 Signal Processing LectureDocument29 pagesME360 Signal Processing Lecture陈炯帆No ratings yet
- 2-SDOF Systems - Free VibrationDocument22 pages2-SDOF Systems - Free Vibrationebrahimmousa9999No ratings yet
- Sildes - Non LinearDocument58 pagesSildes - Non LinearPietro TestaNo ratings yet
- Lecture 2 - ME2617 Free Motion of Damped SystemsDocument33 pagesLecture 2 - ME2617 Free Motion of Damped SystemsHamzah QadriNo ratings yet
- MV FinalDocument64 pagesMV FinaldominiojhtNo ratings yet
- Mechanical Vibrations: Why Do We Study ?Document27 pagesMechanical Vibrations: Why Do We Study ?sagar kumarNo ratings yet
- L04 Quantum Mechanics - 2Document22 pagesL04 Quantum Mechanics - 2ashish kumarNo ratings yet
- Quantum Mechanics L21Document10 pagesQuantum Mechanics L21JoshuaNo ratings yet
- Chapter 1 - Introduction AD2020 Part 2Document19 pagesChapter 1 - Introduction AD2020 Part 2Dara SibajaNo ratings yet
- 6 MonteCarlo IsingDocument38 pages6 MonteCarlo IsingBillel AribNo ratings yet
- Lagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocument29 pagesLagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesNo ratings yet
- Lesson5 Other Boundary Layer Solutions and 3 D Layers Handout - v2Document15 pagesLesson5 Other Boundary Layer Solutions and 3 D Layers Handout - v2Vijay NarayanNo ratings yet
- Waves & Oscillations: Physics 42200Document24 pagesWaves & Oscillations: Physics 42200Kintania Sisca Rivana Part IINo ratings yet
- Structural Dynamics - ESA 322 Lecture 3aDocument34 pagesStructural Dynamics - ESA 322 Lecture 3aPurawin SubramaniamNo ratings yet
- Signals Systems Lecture 12 FT Analysis TransmissionDocument20 pagesSignals Systems Lecture 12 FT Analysis TransmissionkentNo ratings yet
- Exponential Fourier SeriesDocument4 pagesExponential Fourier SeriesVincent KiptanuiNo ratings yet
- Termodinamika Teknik Kimia 2 - Week3Document76 pagesTermodinamika Teknik Kimia 2 - Week3SandyPratamaAdhiNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101From EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No ratings yet
- Chapter 6: Fatigue Failure: Introduction, Basic ConceptsDocument21 pagesChapter 6: Fatigue Failure: Introduction, Basic ConceptsNick MezaNo ratings yet
- Chapter 4: Deflection and Stiffness: ME 304 Introduction To Machine DesignDocument10 pagesChapter 4: Deflection and Stiffness: ME 304 Introduction To Machine DesignNick MezaNo ratings yet
- Chapter 5: Failures Resulting From Static Loading: ME 304 Introduction To Machine DesignDocument13 pagesChapter 5: Failures Resulting From Static Loading: ME 304 Introduction To Machine DesignNick MezaNo ratings yet
- Chapter 3: Load and Stress Analysis: ME 304 Introduction To Machine DesignDocument18 pagesChapter 3: Load and Stress Analysis: ME 304 Introduction To Machine DesignNick MezaNo ratings yet
- MD Week 1Document1 pageMD Week 1Nick MezaNo ratings yet
- Arduino Mario Bros Tunes With Piezo Buzzer and PWMDocument6 pagesArduino Mario Bros Tunes With Piezo Buzzer and PWMClaudia GrijalvaNo ratings yet
- Unit 2: Marketing Processes and Planning: Assignment BriefDocument4 pagesUnit 2: Marketing Processes and Planning: Assignment BriefGharis SoomroNo ratings yet
- CV of Dr. Mohammad TahirDocument12 pagesCV of Dr. Mohammad TahirMuhammad FayyazNo ratings yet
- Astm A710Document3 pagesAstm A710Cristian Otivo100% (1)
- Enthalpy ChangesDocument2 pagesEnthalpy Changesapi-296833859100% (1)
- Company Introduction PT GEADocument8 pagesCompany Introduction PT GEABegawan Half DoneNo ratings yet
- THICKWALL CYLINDERS AND PRESS FITSDocument10 pagesTHICKWALL CYLINDERS AND PRESS FITSankitaNo ratings yet
- English Team Agenda 2023-2024Document4 pagesEnglish Team Agenda 2023-2024api-604869051No ratings yet
- a9ff9ISM - Business DefinitionDocument7 pagesa9ff9ISM - Business DefinitionVikram Kumar100% (1)
- Google Wakeword Detection 1 PDFDocument5 pagesGoogle Wakeword Detection 1 PDFÖzgür Bora GevrekNo ratings yet
- Consumers Guide To The ExpertsDocument406 pagesConsumers Guide To The ExpertsHassan Younhous Traore KonéNo ratings yet
- Service Training: Vorsprung Durch Technik WWW - Audi.deDocument15 pagesService Training: Vorsprung Durch Technik WWW - Audi.depuncimanNo ratings yet
- Emebet Kebede FINALDocument65 pagesEmebet Kebede FINALTefeNo ratings yet
- ST Patrick Lodge 199 BibleDocument5 pagesST Patrick Lodge 199 Bibletofique_fatehiNo ratings yet
- Lesson Plan For Demonstration (COT) : School Grade Level Teacher Learning Area Teaching Dates and Time QuarterDocument6 pagesLesson Plan For Demonstration (COT) : School Grade Level Teacher Learning Area Teaching Dates and Time Quartermaritel dawaNo ratings yet
- Revised Bsy Elementary Siatonwest 2 and Pio-Macahig - 2014-15 As of June 6 2014Document31 pagesRevised Bsy Elementary Siatonwest 2 and Pio-Macahig - 2014-15 As of June 6 2014api-273918959No ratings yet
- Lean Healthy Raw Food Winter RecipesDocument60 pagesLean Healthy Raw Food Winter RecipesKaio Sol100% (6)
- Queen'S University Midterm Examination Department of EconomicsDocument7 pagesQueen'S University Midterm Examination Department of EconomicsAsif Ahmed NeloyNo ratings yet
- LP Lab ManuelDocument23 pagesLP Lab ManuelRavi Kumar LankeNo ratings yet
- HPC 9dj 01 0001 2012 Horizon Power Technical Rules Nwis Nis 100717Document175 pagesHPC 9dj 01 0001 2012 Horizon Power Technical Rules Nwis Nis 100717Rajendra ShresthaNo ratings yet
- CBSE Class 10 Maths Sample Paper Set 6Document4 pagesCBSE Class 10 Maths Sample Paper Set 6darshilsinghgharwarNo ratings yet
- HZVDocument6 pagesHZVnurrozaqNo ratings yet
- TECHNICALPAPER2Document8 pagesTECHNICALPAPER2spiderwebNo ratings yet
- 1 SMDocument9 pages1 SMhasanuddinnst1No ratings yet
- The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6. The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6Document1 pageThe Next Questions Will Depend On Your Answer(s) in Question Number 4: 6. The Next Questions Will Depend On Your Answer(s) in Question Number 4: 6cgranzore8833% (3)
- The Management of Productivity and Technology in Manufacturing PDFDocument333 pagesThe Management of Productivity and Technology in Manufacturing PDFmythee100% (2)
- Siwarex Cs-En v12Document15 pagesSiwarex Cs-En v12Diego CanoNo ratings yet
- Android Activity Lifecycle OverviewDocument8 pagesAndroid Activity Lifecycle OverviewMario FedericiNo ratings yet
- TLC Visualization SolutionsDocument3 pagesTLC Visualization SolutionseraborNo ratings yet
- Baxa Resumen PDFDocument12 pagesBaxa Resumen PDFChepe Camacho100% (3)