You might also like
- C 1155 - 95 - QzexntutotuDocument8 pagesC 1155 - 95 - QzexntutotuMuhammad NaumanNo ratings yet
- Association of German EngineersDocument4 pagesAssociation of German Engineersstephen_got_lostNo ratings yet
- Applications - Flash - Method Programa ComsolDocument8 pagesApplications - Flash - Method Programa Comsolivan fernandezNo ratings yet
- Design, Fabrication and Thermal Performance of A Novel Ultra-Thin Vapour PDFDocument11 pagesDesign, Fabrication and Thermal Performance of A Novel Ultra-Thin Vapour PDFErika Kawakami VasconcelosNo ratings yet
- Energy Laboratory Report #3 (Recovered)Document9 pagesEnergy Laboratory Report #3 (Recovered)shafahatNo ratings yet
- Thermistor:: PTC ThermistorsDocument6 pagesThermistor:: PTC ThermistorsTanveer AliNo ratings yet
- Temperature MeasurementDocument9 pagesTemperature Measurementbarry nancooNo ratings yet
- Application Thermistor NTC 10kDocument2 pagesApplication Thermistor NTC 10kAlexanderNugrohoNo ratings yet
- Towards Longwave Infrared Tuneable Filters For Multispectral Thermal Imaging ApplicationsDocument6 pagesTowards Longwave Infrared Tuneable Filters For Multispectral Thermal Imaging ApplicationsAatishImrozNo ratings yet
- Factors Affecting Temperature Measurement AccuracyDocument2 pagesFactors Affecting Temperature Measurement AccuracyMarvZz VillasisNo ratings yet
- Thermocouples: Prepared By: K Krishna Kishore 4 Year ECE 15F41A0440 Presented To: Mr. S. Nanda Kishore (PH.D.)Document17 pagesThermocouples: Prepared By: K Krishna Kishore 4 Year ECE 15F41A0440 Presented To: Mr. S. Nanda Kishore (PH.D.)k kNo ratings yet
- Temperature Coefficients For PVDocument6 pagesTemperature Coefficients For PVBrandon ChoateNo ratings yet
- Laboratory Record: Iksha ' NusandhanDocument33 pagesLaboratory Record: Iksha ' NusandhanSamNo ratings yet
- IR SensorDocument8 pagesIR Sensoraksaltaf9137100% (1)
- Measuring The Thermal Conductivity of CopperDocument4 pagesMeasuring The Thermal Conductivity of CopperPiyush MoradiyaNo ratings yet
- Analyzing 6A/B Belt Coal at TP6Document11 pagesAnalyzing 6A/B Belt Coal at TP6Ashish Fating100% (1)
- Design of Helmet Cooling System Modules and Their ComparisonDocument9 pagesDesign of Helmet Cooling System Modules and Their ComparisonIJRASETPublicationsNo ratings yet
- La Calorimetria di Reazione per lo Sviluppo e la Sicurezza dei Processi ChimiciDocument31 pagesLa Calorimetria di Reazione per lo Sviluppo e la Sicurezza dei Processi ChimiciKirubakar ThamaraikannanNo ratings yet
- Unit-2 Tutorial SheetDocument11 pagesUnit-2 Tutorial SheetAbhinav Sahu100% (1)
- 2005 Chudnov Sky PaperDocument0 pages2005 Chudnov Sky PaperCharles_DNo ratings yet
- Electron Capture Detector For GCDocument16 pagesElectron Capture Detector For GCpmdNo ratings yet
- Piezo Electric Transducer ReportDocument8 pagesPiezo Electric Transducer Reportأسامة عليNo ratings yet
- Bimetallic Thermometer: Instrumentation and Process ControlDocument11 pagesBimetallic Thermometer: Instrumentation and Process ControlPutri WandiniNo ratings yet
- Heat Transfer in Nanofluids-A ReviewDocument18 pagesHeat Transfer in Nanofluids-A ReviewShri Vignesh KNo ratings yet
- University of Engineering & Technology, Mardan SEMESTER 1 Lab ReportsDocument6 pagesUniversity of Engineering & Technology, Mardan SEMESTER 1 Lab Reportsengabdulhafeez1No ratings yet
- TP0000065 (E) Platinum RTDs PDFDocument17 pagesTP0000065 (E) Platinum RTDs PDFCarlosNo ratings yet
- LB440 PDFDocument6 pagesLB440 PDFAgustanto100% (1)
- Lab Eight: Final Project: Honor PledgeDocument56 pagesLab Eight: Final Project: Honor Pledgeapi-557294321No ratings yet
- Disturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Document4 pagesDisturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Suresh SNo ratings yet
- Ucm Anna Univ Question PapersDocument24 pagesUcm Anna Univ Question PapersNarayanan SubramanianNo ratings yet
- E 000007939Document162 pagesE 000007939kishore00121No ratings yet
- Temperature, Light & Pressure SensorsDocument60 pagesTemperature, Light & Pressure SensorsHaider-e-KararNo ratings yet
- Geoelectric Strike and Its Application in MagnetotelluricsDocument40 pagesGeoelectric Strike and Its Application in MagnetotelluricsamiruddinNo ratings yet
- Solution Manual PDFDocument162 pagesSolution Manual PDFBerihu GirmayNo ratings yet
- Thermal Expansion of Metals Measured by Dilatometer LabDocument7 pagesThermal Expansion of Metals Measured by Dilatometer LabTaqqi HaiderNo ratings yet
- Don Reed3-25070-H2 - WS58 Answers May11Document7 pagesDon Reed3-25070-H2 - WS58 Answers May11ThanThansccNo ratings yet
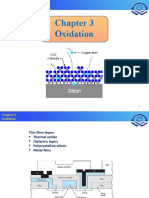
- Thermal Oxidation of Silicon for Dielectric FilmsDocument49 pagesThermal Oxidation of Silicon for Dielectric FilmssunNo ratings yet
- Survey of Temperature Sensors Used in Various Thermal SystemsDocument3 pagesSurvey of Temperature Sensors Used in Various Thermal SystemsRavi PatilNo ratings yet
- ME3122E-Heat Transfer Lab A-Temperature MeasurementDocument9 pagesME3122E-Heat Transfer Lab A-Temperature MeasurementLinShaodun0% (1)
- Home Work 2 2020Document2 pagesHome Work 2 2020Catherine Pakhomova100% (1)
- 3361907Document17 pages3361907Chandresh Motka100% (1)
- 9 DENSITRAK D625 Operation ManualDocument29 pages9 DENSITRAK D625 Operation ManualfbarrazaisaNo ratings yet
- Lab Report Heat CnductionDocument17 pagesLab Report Heat CnductionainnorNo ratings yet
- Thin FilmsDocument9 pagesThin Filmshareesh13hNo ratings yet
- Measuring Linear Expansion CoefficientsDocument3 pagesMeasuring Linear Expansion CoefficientsDana Franchesca DichosoNo ratings yet
- YSICatalog 1998Document85 pagesYSICatalog 1998danielNo ratings yet
- ENGR 135 Lab #5 Verifies Stefan-Boltzmann LawDocument12 pagesENGR 135 Lab #5 Verifies Stefan-Boltzmann Lawgigabyte3235840No ratings yet
- InsulationDocument23 pagesInsulationcm10edNo ratings yet
- Common Fault Analysis and Solution of ThermocoupleDocument15 pagesCommon Fault Analysis and Solution of ThermocoupleYiDan LiNo ratings yet
- Ferroperm CatalogueDocument24 pagesFerroperm Catalogueapi-3809613100% (2)
- Ontario HOT2000 PDFDocument138 pagesOntario HOT2000 PDFelish_agrawalNo ratings yet
- Effect of Geometric Parameter On Steel ChimneyDocument8 pagesEffect of Geometric Parameter On Steel ChimneyIJRASETPublicationsNo ratings yet
- PANIMALAR ENGINEERING COLLEGE HEAT AND MASS TRANSFER MODEL EXAMDocument2 pagesPANIMALAR ENGINEERING COLLEGE HEAT AND MASS TRANSFER MODEL EXAMPoyyamozhi Nadesan RanjithNo ratings yet
- Design of A 24GHz Rectangular Microstrip Patch Antenna For Wireless ApplicationsDocument7 pagesDesign of A 24GHz Rectangular Microstrip Patch Antenna For Wireless ApplicationsIJRASETPublicationsNo ratings yet
- Thermo Chapter 3Document27 pagesThermo Chapter 3Mohd AziziNo ratings yet
- THESIS Experimental Investigation of Heat Recovery From R744 Based Refrigeration SystemDocument67 pagesTHESIS Experimental Investigation of Heat Recovery From R744 Based Refrigeration SystemP. ReobNo ratings yet
- SensorsDocument13 pagesSensorsVlad StefanNo ratings yet
- Design of Temperature Measuring Instrument Using NDocument8 pagesDesign of Temperature Measuring Instrument Using NHải Châu ThanhNo ratings yet
- 1 s2.0 S0924424724000529 MainDocument12 pages1 s2.0 S0924424724000529 Mainopenjavier5208No ratings yet
- Detection of Fires in The Toilet Compartment and Driver Sleeping Compartment of Buses and Coaches-InstallationDocument10 pagesDetection of Fires in The Toilet Compartment and Driver Sleeping Compartment of Buses and Coaches-InstallationMicu CristiNo ratings yet
- Composite MaterialsDocument694 pagesComposite MaterialsMorteza Shakerien100% (4)
- Piezoelectric Composite SensorsDocument12 pagesPiezoelectric Composite SensorsMicu CristiNo ratings yet
- Piezoelectric Composite SensorsDocument12 pagesPiezoelectric Composite SensorsMicu CristiNo ratings yet
- Eliminating The Effects of Refractive Indices For Both White Smokes Andblack Smokes in Optical Fire DetectorDocument9 pagesEliminating The Effects of Refractive Indices For Both White Smokes Andblack Smokes in Optical Fire DetectorMicu CristiNo ratings yet
- Early Fire Detection Are Hydrogen Sensors Able To Detect Pyrolysis of House Hold MaterialsDocument9 pagesEarly Fire Detection Are Hydrogen Sensors Able To Detect Pyrolysis of House Hold MaterialsMicu CristiNo ratings yet
- Early Fire Detection Are Hydrogen Sensors Able To Detect Pyrolysis of House Hold MaterialsDocument9 pagesEarly Fire Detection Are Hydrogen Sensors Able To Detect Pyrolysis of House Hold MaterialsMicu CristiNo ratings yet
- Detection of Fires in The Toilet Compartment and Driver Sleeping Compartment of Buses and Coaches-InstallationDocument10 pagesDetection of Fires in The Toilet Compartment and Driver Sleeping Compartment of Buses and Coaches-InstallationMicu CristiNo ratings yet
- Experimental Study On The Testing Environment Improvement of Fire Smoke DetectorsDocument7 pagesExperimental Study On The Testing Environment Improvement of Fire Smoke DetectorsMicu CristiNo ratings yet
- Eliminating The Effects of Refractive Indices For Both White Smokes Andblack Smokes in Optical Fire DetectorDocument9 pagesEliminating The Effects of Refractive Indices For Both White Smokes Andblack Smokes in Optical Fire DetectorMicu CristiNo ratings yet
- Experimental Study On The Testing Environment Improvement of Fire Smoke DetectorsDocument7 pagesExperimental Study On The Testing Environment Improvement of Fire Smoke DetectorsMicu CristiNo ratings yet
- Design of Wireless Automatic Fire Alarm SystemDocument5 pagesDesign of Wireless Automatic Fire Alarm SystemJashwanth SatyaNo ratings yet
- Nail Polish and Carbon Powder An Attractive Mixture To Prepare Paper Based ElectrodesDocument7 pagesNail Polish and Carbon Powder An Attractive Mixture To Prepare Paper Based ElectrodesMicu CristiNo ratings yet
- Design of Wireless Automatic Fire Alarm SystemDocument5 pagesDesign of Wireless Automatic Fire Alarm SystemJashwanth SatyaNo ratings yet
- Reduced graphene oxide-cellulose films for flexible temperature sensorsDocument8 pagesReduced graphene oxide-cellulose films for flexible temperature sensorsMicu CristiNo ratings yet
- Flexible Temperature Sensors A ReviewDocument16 pagesFlexible Temperature Sensors A ReviewMicu CristiNo ratings yet
- 1 s2.0 S0925838816326305 MainDocument10 pages1 s2.0 S0925838816326305 MainMicu CristiNo ratings yet
- The Rise of Conductive Copper Inks Challenges and PerspectiveDocument26 pagesThe Rise of Conductive Copper Inks Challenges and PerspectiveMicu CristiNo ratings yet
- Development of Conductive Inks For Electrochemical Sensors and BiosensorsDocument13 pagesDevelopment of Conductive Inks For Electrochemical Sensors and BiosensorsMicu CristiNo ratings yet
- Conducting Polymer Nanocomposite BasedDocument58 pagesConducting Polymer Nanocomposite BasedMicu CristiNo ratings yet
- Glass Varnish-Based Carbon Conductive Ink A New Way To Produce Disposable SensorDocument12 pagesGlass Varnish-Based Carbon Conductive Ink A New Way To Produce Disposable SensorMicu CristiNo ratings yet
- Reduced graphene oxide-cellulose films for flexible temperature sensorsDocument8 pagesReduced graphene oxide-cellulose films for flexible temperature sensorsMicu CristiNo ratings yet
- A Carbon Nanotube Based NTC Thermistor Using AdditiveDocument9 pagesA Carbon Nanotube Based NTC Thermistor Using AdditiveMicu CristiNo ratings yet
- The Rise of Conductive Copper Inks Challenges and PerspectiveDocument26 pagesThe Rise of Conductive Copper Inks Challenges and PerspectiveMicu CristiNo ratings yet
- Flexible Temperature Sensors A ReviewDocument16 pagesFlexible Temperature Sensors A ReviewMicu CristiNo ratings yet
- Multifunctional Flexible and Stretchable Graphite-Silicone Rubber CompositesDocument10 pagesMultifunctional Flexible and Stretchable Graphite-Silicone Rubber CompositesMicu CristiNo ratings yet
- A Review of Multifunctional Polymer-Matrix Structural CompositesDocument17 pagesA Review of Multifunctional Polymer-Matrix Structural CompositesMicu CristiNo ratings yet
- Nail Polish and Carbon Powder An Attractive Mixture To Prepare Paper Based ElectrodesDocument7 pagesNail Polish and Carbon Powder An Attractive Mixture To Prepare Paper Based ElectrodesMicu CristiNo ratings yet
- Glass Varnish-Based Carbon Conductive Ink A New Way To Produce Disposable SensorDocument12 pagesGlass Varnish-Based Carbon Conductive Ink A New Way To Produce Disposable SensorMicu CristiNo ratings yet
- Development of Conductive Inks For Electrochemical Sensors and BiosensorsDocument13 pagesDevelopment of Conductive Inks For Electrochemical Sensors and BiosensorsMicu CristiNo ratings yet
- Sf8010 Pavement Engineering L T P CDocument6 pagesSf8010 Pavement Engineering L T P CRavichandran.PNo ratings yet
- Meissner Effect in SuperconductorsDocument15 pagesMeissner Effect in SuperconductorsKhushbu SavaliyaNo ratings yet
- Mechanical Properties of Ultra-High-Performance Concrete Enhanced With Graphite Nanoplatelets and Carbon NanofibersDocument10 pagesMechanical Properties of Ultra-High-Performance Concrete Enhanced With Graphite Nanoplatelets and Carbon NanofibersRUSNA KPNo ratings yet
- AC Performance of NanoelectronicsDocument23 pagesAC Performance of Nanoelectronicspraveenpv7No ratings yet
- An Overview of Graphene Materials-Properties, ApplicationsDocument17 pagesAn Overview of Graphene Materials-Properties, ApplicationsDoktor transmisionesNo ratings yet
- NASA: 80079main 11 02astrogramDocument16 pagesNASA: 80079main 11 02astrogramNASAdocumentsNo ratings yet
- PSNS-Thesis - Complete Thesis 25Document266 pagesPSNS-Thesis - Complete Thesis 25venkatesh maduthuriNo ratings yet
- 1 s2.0 S0048969722062040 MainDocument12 pages1 s2.0 S0048969722062040 MainAlbanny PerezNo ratings yet
- Alexander Bolonkin New Concepts Ideas Innovations in Aerospace Technology and The Human SciencesDocument428 pagesAlexander Bolonkin New Concepts Ideas Innovations in Aerospace Technology and The Human SciencesCody Harrison100% (1)
- Nano Reinforced Cement and Concrete Composites Graphene Oxide ReviewDocument12 pagesNano Reinforced Cement and Concrete Composites Graphene Oxide ReviewMaria Elisa LaraNo ratings yet
- Vinoddddd PDFDocument56 pagesVinoddddd PDFvinodNo ratings yet
- Applied Surface Science: D.C.D. Nath, S. Bandyopadhyay, S. Gupta, A. Yu, D. Blackburn, C. WhiteDocument5 pagesApplied Surface Science: D.C.D. Nath, S. Bandyopadhyay, S. Gupta, A. Yu, D. Blackburn, C. WhitesrinilsukumarkhdNo ratings yet
- Student Sem-End Examination Results 2019Document2 pagesStudent Sem-End Examination Results 2019Himanshu MishraNo ratings yet
- Report On Properties and Applications of Carbon NanotubesDocument19 pagesReport On Properties and Applications of Carbon NanotubesArjun SohalNo ratings yet
- HL Paper3Document23 pagesHL Paper3dilemNo ratings yet
- Singh-Nalwa Graphene DSSCs Review 2015Document50 pagesSingh-Nalwa Graphene DSSCs Review 2015hijerNo ratings yet
- CNT Reinforced Aluminum StripsDocument7 pagesCNT Reinforced Aluminum Stripscm230No ratings yet
- Onion-Like Graphitic Particles: PergamonDocument5 pagesOnion-Like Graphitic Particles: PergamonJose Fernando Noreña SalasNo ratings yet
- Review Article: Carbon Nanotubes: Applications in Pharmacy and MedicineDocument13 pagesReview Article: Carbon Nanotubes: Applications in Pharmacy and MedicineShrinivas KatkamwarNo ratings yet
- B Tech Nano TechnologyDocument26 pagesB Tech Nano TechnologyNellai VprNo ratings yet
- Carbon NanotubeDocument45 pagesCarbon NanotubeAHMAD AL AZZAMNo ratings yet
- VR17Document206 pagesVR17Kalavakunta PrudhviNo ratings yet
- Sensors 22 04083 v3Document17 pagesSensors 22 04083 v3amir pagoliNo ratings yet
- Ferrari, Basko - 2013 - Raman Spectroscopy As A Versatile Tool For Studying The Properties of GrapheneDocument12 pagesFerrari, Basko - 2013 - Raman Spectroscopy As A Versatile Tool For Studying The Properties of GrapheneMarcelo AlbuquerqueNo ratings yet
- Huang Et Al-2019-Advanced Materials TechnologiesDocument42 pagesHuang Et Al-2019-Advanced Materials TechnologiesNajwa IbrahimsaidNo ratings yet
- Mod1-EC402 Nano Electronics - Ktustudents - inDocument64 pagesMod1-EC402 Nano Electronics - Ktustudents - inSrilakshmi MNo ratings yet
- RTL-to-GDS Design Tools For Monolithic 3D ICsDocument8 pagesRTL-to-GDS Design Tools For Monolithic 3D ICsjiangcj27No ratings yet
- Graphene Catalogue2019Document72 pagesGraphene Catalogue2019Ana Clara SoaresNo ratings yet
- Chemosensors 09 00225 v3Document40 pagesChemosensors 09 00225 v3Ravi KumarNo ratings yet
- ME222 MIDsemslideDocument238 pagesME222 MIDsemslideSahil GalaNo ratings yet