You might also like
- Application of Wireless Technologies in Nuclear Power Plant Instrumentation and Control SystemsFrom EverandApplication of Wireless Technologies in Nuclear Power Plant Instrumentation and Control SystemsNo ratings yet
- Alcohol Detection Alert and Car Engine Blocking SystemDocument42 pagesAlcohol Detection Alert and Car Engine Blocking SystemDinesh arNo ratings yet
- Reliability of High-Power Mechatronic Systems 2: Aerospace and Automotive Applications: Issues,Testing and AnalysisFrom EverandReliability of High-Power Mechatronic Systems 2: Aerospace and Automotive Applications: Issues,Testing and AnalysisNo ratings yet
- Detection of LPG Leakage Using ArduinoDocument30 pagesDetection of LPG Leakage Using ArduinoMadhurima SenguptaNo ratings yet
- Sound Detector Using Op-Amp 741 PDFDocument22 pagesSound Detector Using Op-Amp 741 PDFDãyäñidhï Ñæïk0% (1)
- Guidelines for the Determination of Standardized Semiconductor Radiation Hardness ParametersFrom EverandGuidelines for the Determination of Standardized Semiconductor Radiation Hardness ParametersNo ratings yet
- Study and Design of Power InverterDocument34 pagesStudy and Design of Power InverterArcNo ratings yet
- Automatic Door Opening Closing System Using PIR SensorDocument53 pagesAutomatic Door Opening Closing System Using PIR SensorHamza KhanNo ratings yet
- Harvesting Lightning EnergyDocument41 pagesHarvesting Lightning EnergyMubeezi ConseptarNo ratings yet
- Circiut VisiDocument30 pagesCirciut Visimohamet kayse farahNo ratings yet
- Report - Red TactonDocument39 pagesReport - Red TactonBindu PranithNo ratings yet
- Automatic Water Level Controller Using 555 TimerDocument31 pagesAutomatic Water Level Controller Using 555 TimerFARUK KHAN100% (1)
- Thermoelectric Generator Based Energy Harvester From Transfer PDFDocument16 pagesThermoelectric Generator Based Energy Harvester From Transfer PDFAbinNo ratings yet
- "Red Tacton": A Technical Seminar Report ONDocument18 pages"Red Tacton": A Technical Seminar Report ONS Naresh KumarNo ratings yet
- Control of Tank WaterDocument30 pagesControl of Tank Watershyam 33No ratings yet
- Solar Panel Tracking System: Electrical & Electronics EngineeringDocument4 pagesSolar Panel Tracking System: Electrical & Electronics EngineeringA Rakesh RakhyNo ratings yet
- Iitd Ird 226 2023Document1 pageIitd Ird 226 2023rajm2rgNo ratings yet
- Red Tacton Technology PPT - 201810346Document23 pagesRed Tacton Technology PPT - 201810346SubhransuNo ratings yet
- Linear Electromechanical Actuator: Jrag LerabadDocument12 pagesLinear Electromechanical Actuator: Jrag LerabadVarun VermaNo ratings yet
- Redtacton (Report)Document30 pagesRedtacton (Report)Jinu100% (1)
- GSM Based Home Security SystemDocument41 pagesGSM Based Home Security Systemchapsbanda00No ratings yet
- A Technical Seminar Report OnDocument11 pagesA Technical Seminar Report OnaravindnehaNo ratings yet
- The Overall Study of Gas Insulated Substation at Mint Compound in HyderabadDocument50 pagesThe Overall Study of Gas Insulated Substation at Mint Compound in Hyderabadgangadharmuvvala100% (1)
- Iitd Ird 129 2023Document1 pageIitd Ird 129 2023Utkarsh RajNo ratings yet
- Seminar Report - Red TactonDocument40 pagesSeminar Report - Red TactonBindu PranithNo ratings yet
- IED Based Power Out Age System PDFDocument13 pagesIED Based Power Out Age System PDFAbinNo ratings yet
- Rohit Internal DocumentationDocument22 pagesRohit Internal DocumentationAnusha VanacharlaNo ratings yet
- Sree Rama Engineering College: Iot Based Environment Pollution Monitoring SystemDocument32 pagesSree Rama Engineering College: Iot Based Environment Pollution Monitoring SystemPrashun PalNo ratings yet
- BOOKLET RTFM KRNDocument75 pagesBOOKLET RTFM KRNJay SuryawanshiNo ratings yet
- Influence of PMEDM On MRR and TWRDocument11 pagesInfluence of PMEDM On MRR and TWRdanikichlerNo ratings yet
- Final Report of "Infrared Thermography To Failure Detection in Induction MotorsDocument31 pagesFinal Report of "Infrared Thermography To Failure Detection in Induction MotorsKarnam Thojeswar ChowdharyNo ratings yet
- Project Report 8th SemDocument52 pagesProject Report 8th SemInvincible 2.0No ratings yet
- Square Wave Generator-1Document35 pagesSquare Wave Generator-1Manpreetnoor AulakhNo ratings yet
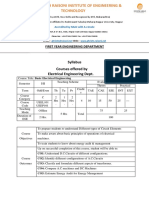
- Syllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentDocument5 pagesSyllabus Courses Offered by Electrical Engineering Dept.: First Year Engineering DepartmentRavi KankaleNo ratings yet
- Project Phase1Document23 pagesProject Phase1v.saigeetha lakshmiNo ratings yet
- Contact Less Tachometer FinalllDocument45 pagesContact Less Tachometer Finalllmohit_malik99100% (1)
- Seminar Report On RedtactonDocument34 pagesSeminar Report On RedtactonVishnu RajoriaNo ratings yet
- Bachelor of Technology IN Computer Science and Engineering: Red TactonDocument28 pagesBachelor of Technology IN Computer Science and Engineering: Red TactonSurya LakkojuNo ratings yet
- Seminar Report On RedtactonDocument31 pagesSeminar Report On RedtactonVeerendra SinghNo ratings yet
- Construction of SubDocument47 pagesConstruction of SubPreet ChahalNo ratings yet
- "Transparent Electronics": Submitted in Partial Fulfilment of Requirements For The Award of The Degree ofDocument8 pages"Transparent Electronics": Submitted in Partial Fulfilment of Requirements For The Award of The Degree ofPraveen SharmaNo ratings yet
- Mini Project Final 2Document28 pagesMini Project Final 2Rashid RashidNo ratings yet
- AI Documention - MergedDocument29 pagesAI Documention - MergedShashidhar KarravulaNo ratings yet
- Abu Jehad Sarim CV and DocsDocument21 pagesAbu Jehad Sarim CV and DocsSaif Ur RehmanNo ratings yet
- Position Control System - Analysis and DesignDocument58 pagesPosition Control System - Analysis and DesignSanjiv ShomeNo ratings yet
- 33-11KV Substation Maintenance Report by Jbit Batch 1Document48 pages33-11KV Substation Maintenance Report by Jbit Batch 1jsaivardhan23No ratings yet
- Mini ProjectDocument40 pagesMini ProjectPakki Akhil KumarNo ratings yet
- AC Lab Manual-2019-20Document19 pagesAC Lab Manual-2019-20abdul sagheerNo ratings yet
- AMPS 2020 - IITRoorkee - Brochure PDFDocument5 pagesAMPS 2020 - IITRoorkee - Brochure PDFknighthood4allNo ratings yet
- D.O. Letter IIT Kanpur 1Document2 pagesD.O. Letter IIT Kanpur 1Aniket ZunkeNo ratings yet
- Govt - Polytechnic College Nedumangadu: Seminar Report ONDocument29 pagesGovt - Polytechnic College Nedumangadu: Seminar Report ONkarpagam nddNo ratings yet
- Electrical Handbook Formula Book SampleDocument73 pagesElectrical Handbook Formula Book Samplesnitin26100% (2)
- Thesis Aitam PDFDocument16 pagesThesis Aitam PDFpavan puppalaNo ratings yet
- Dissertation Submitted in Partial Fulfillment of The Requirement For The Award of The Degree ofDocument8 pagesDissertation Submitted in Partial Fulfillment of The Requirement For The Award of The Degree ofBhanu K PrakashNo ratings yet
- "Red Tacton": A Seminar Report OnDocument7 pages"Red Tacton": A Seminar Report OnSahil PundNo ratings yet
- Title PagesDocument4 pagesTitle PagesANU GRAPHICSNo ratings yet
- "Red Tacton": A Seminar Report OnDocument7 pages"Red Tacton": A Seminar Report OnSahil PundNo ratings yet
- Energy Efficiency of Mimo Ofdm System: A Project ReportDocument72 pagesEnergy Efficiency of Mimo Ofdm System: A Project ReportJaco MarketlandNo ratings yet
- Augmented Reality SEMINAR REPORT SubmittDocument73 pagesAugmented Reality SEMINAR REPORT SubmittTUSHAR NAMANo ratings yet
- Branch - EC 3rdDocument10 pagesBranch - EC 3rdRose PalNo ratings yet
- Image To PDF 20210723 17.51.52Document10 pagesImage To PDF 20210723 17.51.52Rose PalNo ratings yet
- Low Cost Automatic Water Level Control For Domestic ApplicationsDocument37 pagesLow Cost Automatic Water Level Control For Domestic ApplicationsHassan JamalNo ratings yet
- Smart Door Lock: Worcester Polytechnic InstituteDocument40 pagesSmart Door Lock: Worcester Polytechnic InstituteKruti Gawde100% (1)
- DN 60245 PDFDocument2 pagesDN 60245 PDFAnonymous Mw2nwE6AjNo ratings yet
- Item Number Part Number Description of Part Asset/Equipment TypeDocument46 pagesItem Number Part Number Description of Part Asset/Equipment TypeRavi SharmaNo ratings yet
- Mobile Robot Chapter 7: The Motors of The Robot (V.4a)Document18 pagesMobile Robot Chapter 7: The Motors of The Robot (V.4a)Carlos RamirezNo ratings yet
- Xeffect SASY60i 111003 enDocument82 pagesXeffect SASY60i 111003 enCarlos Alvarez BcNo ratings yet
- 44-O&C Blister Packing MachineDocument7 pages44-O&C Blister Packing MachineananthNo ratings yet
- VTV-2 50054 3.0 en EuDocument4 pagesVTV-2 50054 3.0 en EuMINo ratings yet
- Ooval Metal Catalogue (English) 120509Document16 pagesOoval Metal Catalogue (English) 120509Stefce PetrovNo ratings yet
- Lincoln ServiceDocument8 pagesLincoln ServicevargheseNo ratings yet
- Gejzir VazduhDocument9 pagesGejzir VazduhssteticNo ratings yet
- Pneumatics PDFDocument138 pagesPneumatics PDFfurkan84No ratings yet
- Pressure Wiring PDFDocument51 pagesPressure Wiring PDFDinesh meemanageNo ratings yet
- Radio Design V1 N1 1927 FallDocument8 pagesRadio Design V1 N1 1927 FallVictor AsterdamNo ratings yet
- Electrical PresentationDocument54 pagesElectrical PresentationSupriyo Mehta100% (1)
- Publication PDFDocument202 pagesPublication PDFYoucefChaabnaNo ratings yet
- Bidirectional DC To DC Converter With Ann Controller For Hybrid Electric VehicleDocument8 pagesBidirectional DC To DC Converter With Ann Controller For Hybrid Electric VehicleTeam RaagNo ratings yet
- Mercedes Trucks FR Fault Codes List Truckmanualshub - Com-1Document14 pagesMercedes Trucks FR Fault Codes List Truckmanualshub - Com-1frank mutaleNo ratings yet
- Electric Currents and Its Effects PA2Document17 pagesElectric Currents and Its Effects PA2Advaith VaithianathanNo ratings yet
- SECTION 08 71 13 Automatic Door OperatorsDocument9 pagesSECTION 08 71 13 Automatic Door OperatorsJuanPaoloYbañezNo ratings yet
- Service Manual 6000 SeriesDocument13 pagesService Manual 6000 SeriesKarna PatelNo ratings yet
- Ch1 Drawing Electrical DiagramsDocument12 pagesCh1 Drawing Electrical Diagramsmrb88No ratings yet
- System Manual Vic+Dip-4+MtcoDocument166 pagesSystem Manual Vic+Dip-4+MtcoP Gl100% (1)
- Manual Ecodial 2Document44 pagesManual Ecodial 2Anthony AdamsNo ratings yet
- Operation and Maintenance Manual: IRN37-160K - CC, IRN50-200H-CC, IRN75-160K-2S, IRN100-200H-2S, R190-225NEDocument102 pagesOperation and Maintenance Manual: IRN37-160K - CC, IRN50-200H-CC, IRN75-160K-2S, IRN100-200H-2S, R190-225NEclavergara50% (2)
- ADVENTURE LIGHTS Military Brochure Small Format PDFDocument11 pagesADVENTURE LIGHTS Military Brochure Small Format PDFTacticas de SeguridadNo ratings yet
- Master Closed BookDocument85 pagesMaster Closed BookMike Adrian CerbitoNo ratings yet
- 621G Wheel Tractor-Scraper Electrical System: Machine Harness Connector and Component LocationsDocument4 pages621G Wheel Tractor-Scraper Electrical System: Machine Harness Connector and Component LocationsLeopoldo Del CampoNo ratings yet
- JUE 251 501 Instruction ManualDocument394 pagesJUE 251 501 Instruction ManualdotatchuongNo ratings yet
- Buchholz Relay: General SpecificationsDocument2 pagesBuchholz Relay: General SpecificationsRamez YassaNo ratings yet
- VulQan - MRK UPS BR 271 VQ EN UAE 14 1 PDFDocument4 pagesVulQan - MRK UPS BR 271 VQ EN UAE 14 1 PDFJavier LerinNo ratings yet
- Chapter 52 Doors AW139Document14 pagesChapter 52 Doors AW139Nita PuteriNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- The Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsFrom EverandThe Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsNo ratings yet
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyFrom EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Advanced Computer-Aided Fixture DesignFrom EverandAdvanced Computer-Aided Fixture DesignRating: 5 out of 5 stars5/5 (1)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansFrom EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansRating: 4 out of 5 stars4/5 (8)
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersFrom EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersRating: 4 out of 5 stars4/5 (13)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsFrom EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNo ratings yet