You might also like
- UR5 Inverse KinematicsDocument8 pagesUR5 Inverse KinematicsLuis Gerardo CarvajalNo ratings yet
- Graded Assignment: Unit Test, Part 2: Radicals and Complex NumbersDocument3 pagesGraded Assignment: Unit Test, Part 2: Radicals and Complex NumbersManuk SogomonyanNo ratings yet
- MR Right - Case Study Test - Summer 2018Document7 pagesMR Right - Case Study Test - Summer 2018jadenNo ratings yet
- Lecture 16Document13 pagesLecture 16Brien LarsonNo ratings yet
- 2011 MOW 323 Semester Test 2 MemoDocument12 pages2011 MOW 323 Semester Test 2 MemopoppyNo ratings yet
- Art Sp01958 RenewedDocument11 pagesArt Sp01958 RenewedSreelekshmi UnnithanNo ratings yet
- P2 太博磊Document15 pagesP2 太博磊Cai MingleiNo ratings yet
- Signal FAQ22 SummaryDocument9 pagesSignal FAQ22 SummaryRubin VarugheseNo ratings yet
- Frame Assignment: I 1 I 1 I I 1Document7 pagesFrame Assignment: I 1 I 1 I I 1Guhan MNo ratings yet
- Ur5 Inverse KinematicsDocument9 pagesUr5 Inverse Kinematicsthanhvu1810aNo ratings yet
- Differential Motions 3Document4 pagesDifferential Motions 3Al-Amin BhuiyanNo ratings yet
- 306 EeDocument4 pages306 Eerawatdevi1998No ratings yet
- Quiz 1 Solutions 2Document5 pagesQuiz 1 Solutions 2whatusernameisallowed2No ratings yet
- Resultants, Discriminants, Bezout, Nullstellensatz, EtcDocument11 pagesResultants, Discriminants, Bezout, Nullstellensatz, EtcPatofnaPatofnicNo ratings yet
- Gerald Forigua Andrade T00049723 Ing. Mecatronica: C 2 X C 2 yDocument1 pageGerald Forigua Andrade T00049723 Ing. Mecatronica: C 2 X C 2 yLina Stella Forigua AndradeNo ratings yet
- Angular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PDocument9 pagesAngular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PKeith wongNo ratings yet
- Math-4 3Document6 pagesMath-4 3Akki KishoreNo ratings yet
- Calculus ReviewDocument5 pagesCalculus Reviewjaylouisedale.badaNo ratings yet
- Alg II Factoring QuizDocument2 pagesAlg II Factoring Quizabailey01No ratings yet
- Solution For Logarithm and Inequality WorksheetDocument3 pagesSolution For Logarithm and Inequality WorksheetPrashanth SNo ratings yet
- Direct and Inverse Answer KeyDocument9 pagesDirect and Inverse Answer KeyNishant BhavsarNo ratings yet
- 2.4 Cumulative Distribution Function (CDF) : X Is No Larger Than XDocument6 pages2.4 Cumulative Distribution Function (CDF) : X Is No Larger Than XvalladiNo ratings yet
- F Inite Element MethodDocument46 pagesF Inite Element MethodDhinakaran VeemanNo ratings yet
- Math-4 2Document5 pagesMath-4 2Akki KishoreNo ratings yet
- 304 EeDocument4 pages304 Eerawatdevi1998No ratings yet
- DYNAMICS OF MACHINERY: Do Kinematic Analysis With MatlabDocument43 pagesDYNAMICS OF MACHINERY: Do Kinematic Analysis With MatlabThanh NguyenNo ratings yet
- Lay Cu: An Rahn X ZDocument10 pagesLay Cu: An Rahn X ZSaurabh GogoiNo ratings yet
- 1VCD400049 E0245 PDFDocument32 pages1VCD400049 E0245 PDFDerouich2019No ratings yet
- Clase 10 Calculo Numerico IDocument26 pagesClase 10 Calculo Numerico ICarlos AlmanzaNo ratings yet
- TAMU MEEN 431 HW 1 SolutionsDocument10 pagesTAMU MEEN 431 HW 1 Solutionslojomojo2No ratings yet
- Exercise - 2 Before MTDocument2 pagesExercise - 2 Before MThanNo ratings yet
- Lecture 10 D.K.Analysis 2Document34 pagesLecture 10 D.K.Analysis 2Krishna KulkarniNo ratings yet
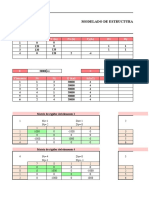
- Modelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyDocument19 pagesModelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyEdgar AlfonsoNo ratings yet
- Real Sherical HarmonicsDocument2 pagesReal Sherical HarmonicsTelhat ÖzdoganNo ratings yet
- Matrix Approach To 1-Way ANOVA: Comparison of Sexual Side Effects in 4 AntidepressantsDocument24 pagesMatrix Approach To 1-Way ANOVA: Comparison of Sexual Side Effects in 4 Antidepressantssumit kumarNo ratings yet
- Rational Exponents & Radicals: John Karlo Mendoza BS Mechanical Engineering University of The Philippines DilimanDocument33 pagesRational Exponents & Radicals: John Karlo Mendoza BS Mechanical Engineering University of The Philippines DilimanJChris EsguerraNo ratings yet
- Branch Line CouplerDocument8 pagesBranch Line CouplerVandana NathNo ratings yet
- 10.mode ExerciseDocument15 pages10.mode Exercisemastercoding2021No ratings yet
- Band On The RunDocument10 pagesBand On The Runno1remfan100% (1)
- WHYtalkDocument25 pagesWHYtalkMarcos ArroyoNo ratings yet
- The Reflection of Asymmetric Shock Waves in Steady Flows: A Numerical InvestigationDocument17 pagesThe Reflection of Asymmetric Shock Waves in Steady Flows: A Numerical InvestigationalexkudryNo ratings yet
- MATH-1201 Note Jan 14, 2022Document8 pagesMATH-1201 Note Jan 14, 2022Kunal KNo ratings yet
- NextFEM Designer-Validation Scaffold ChecksDocument62 pagesNextFEM Designer-Validation Scaffold ChecksAnonymous kBodCGQ79No ratings yet
- Vibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Document5 pagesVibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Morena MoremoholoNo ratings yet
- Supply Constrained Multipliers With SUTDocument15 pagesSupply Constrained Multipliers With SUTdatateamNo ratings yet
- Name: - Satya Pratap Nayak REDG. NO.-1801227441 Dme AssignmentDocument6 pagesName: - Satya Pratap Nayak REDG. NO.-1801227441 Dme AssignmentSatya Pratap NayakNo ratings yet
- Powder Brake Mitsubishi ZKG-20YNDocument2 pagesPowder Brake Mitsubishi ZKG-20YNTjhandNo ratings yet
- QuadeqDocument7 pagesQuadeqОлександр РєзнікNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAshish Kumar JhaNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAnurag JangraNo ratings yet
- Lec5 LcsDocument32 pagesLec5 LcsZain AslamNo ratings yet
- SCM Tech2Document7 pagesSCM Tech2Adnan MalekNo ratings yet
- CH-5-Robot Dynamics and ControlDocument34 pagesCH-5-Robot Dynamics and ControlBazin HailuNo ratings yet
- Advance Mechanics of SolidsDocument6 pagesAdvance Mechanics of SolidsyagneshNo ratings yet
- Chapter 4 PDFDocument11 pagesChapter 4 PDF김채현No ratings yet
- Ejemplos FEDocument12 pagesEjemplos FEMaría Fernanda Fernandez CarrilloNo ratings yet
- Encoders and Decoders, Multiplexer, Tri-State InverterDocument25 pagesEncoders and Decoders, Multiplexer, Tri-State InverterRohit SainiNo ratings yet
- Alevelsb dm1 Ex7bDocument8 pagesAlevelsb dm1 Ex7bmodelrailwaymasterNo ratings yet
- Vlsi Unit 4Document114 pagesVlsi Unit 4Chennam VaishnaviNo ratings yet
- 10P NewtonsSecondLaw 1Document11 pages10P NewtonsSecondLaw 1Naman GuptaNo ratings yet
- Lecture 8 Graphical Velocity Analysis of Planar MechanismsDocument6 pagesLecture 8 Graphical Velocity Analysis of Planar MechanismsmayankmaroliyaNo ratings yet
- Lecture 5 Analytical Position AnalysisDocument10 pagesLecture 5 Analytical Position AnalysismayankmaroliyaNo ratings yet
- Lecture 13-14 Force Analysis (Static Force Analysis)Document23 pagesLecture 13-14 Force Analysis (Static Force Analysis)mayankmaroliyaNo ratings yet
- ME 303 Kinematics and Dynamics of MachinesDocument28 pagesME 303 Kinematics and Dynamics of MachinesmayankmaroliyaNo ratings yet
- Lecture 10 Acceleration Analysis (Graphical and Analytical Analysis)Document10 pagesLecture 10 Acceleration Analysis (Graphical and Analytical Analysis)mayankmaroliyaNo ratings yet
- Lecture 9 Velocity Analysis IC MethodDocument6 pagesLecture 9 Velocity Analysis IC MethodmayankmaroliyaNo ratings yet
- Lecture 6-7 Synthesis of Simple Planar MechanismsDocument12 pagesLecture 6-7 Synthesis of Simple Planar MechanismsmayankmaroliyaNo ratings yet
- Assignment Solution On PythonDocument1 pageAssignment Solution On PythonmayankmaroliyaNo ratings yet
- Lecture 3-4 Position AnalysisDocument8 pagesLecture 3-4 Position AnalysismayankmaroliyaNo ratings yet
- KDM Matlab AssignmentDocument2 pagesKDM Matlab AssignmentmayankmaroliyaNo ratings yet
- Ijret20140323065 PDFDocument6 pagesIjret20140323065 PDFhenokNo ratings yet
- Assignment 1 - Fluid MechanicsDocument3 pagesAssignment 1 - Fluid MechanicsmayankmaroliyaNo ratings yet
- WITNESS Manufacturing Quick GuideDocument44 pagesWITNESS Manufacturing Quick GuidemayankmaroliyaNo ratings yet
- WITNESS Manufacturing Quick GuideDocument44 pagesWITNESS Manufacturing Quick GuidemayankmaroliyaNo ratings yet
- WITNESS Manufacturing Quick GuideDocument44 pagesWITNESS Manufacturing Quick GuidemayankmaroliyaNo ratings yet
- Top Tech BoyzDocument1 pageTop Tech BoyzmayankmaroliyaNo ratings yet
- Experiment 03: Measurement of Absolute Viscosity of Fluid by A Saybolt ViscometerDocument4 pagesExperiment 03: Measurement of Absolute Viscosity of Fluid by A Saybolt Viscometer17044 AZMAIN IKTIDER AKASHNo ratings yet
- Critically Discuss About Major Features of Water Resource Act, 2049 B.SDocument12 pagesCritically Discuss About Major Features of Water Resource Act, 2049 B.SPurple DreamNo ratings yet
- KuchhbhiDocument6 pagesKuchhbhiAbhishek KumarNo ratings yet
- TRANS Finals NSTPDocument6 pagesTRANS Finals NSTPStephanieNo ratings yet
- Housekeeping Services NCII Quarter 3 PDF HousekeepingDocument1 pageHousekeeping Services NCII Quarter 3 PDF HousekeepingSalve RegineNo ratings yet
- Eclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)Document59 pagesEclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)humanzyxNo ratings yet
- ISO 14031 Environmental Performance EvaluationDocument65 pagesISO 14031 Environmental Performance EvaluationSanjayaNo ratings yet
- PreviewpdfDocument51 pagesPreviewpdfZang100% (1)
- AP Geography Study Material-AP Geography Quiz Questions With AnswersDocument3 pagesAP Geography Study Material-AP Geography Quiz Questions With AnswersRaja Sekhar BatchuNo ratings yet
- Debate PaperDocument8 pagesDebate PaperLove MaribaoNo ratings yet
- Lecture 01 ADVANCED ANIMATION AS3Document11 pagesLecture 01 ADVANCED ANIMATION AS3Febb RoseNo ratings yet
- ASTM - E1137 - مشخصات دماسنجهای مقاومتی صنعتیDocument7 pagesASTM - E1137 - مشخصات دماسنجهای مقاومتی صنعتیhosein bagheriNo ratings yet
- The Lived Experience of Customers Purchasing HabitsDocument12 pagesThe Lived Experience of Customers Purchasing HabitsShannyn SuarezNo ratings yet
- Grammar: Frequency AdverbsDocument2 pagesGrammar: Frequency AdverbsRedamanNo ratings yet
- Propositions: A. Learning Outcome Content StandardDocument9 pagesPropositions: A. Learning Outcome Content StandardMarc Joseph NillasNo ratings yet
- Manufacturing Commercial Phosphate FertilizerDocument2 pagesManufacturing Commercial Phosphate FertilizerGhulam Mohy UddinNo ratings yet
- GlobalizationDocument6 pagesGlobalizationSanskruti PathakNo ratings yet
- 5 Fit Tolerances-Problem SolvingDocument10 pages5 Fit Tolerances-Problem SolvingSHIVANANDA DALEINo ratings yet
- Astm D5208 14 2022Document3 pagesAstm D5208 14 2022Maria Aparecida Pereira DamascenoNo ratings yet
- Exercise Phase 4 - Team LeadershipDocument13 pagesExercise Phase 4 - Team LeadershipLUZ AMPARO MARTINEZNo ratings yet
- Combinatorics Worksheet 3 - Recurrence RelationsDocument2 pagesCombinatorics Worksheet 3 - Recurrence RelationsJane ChangNo ratings yet
- Pipeline and Riser Loss of Containment (PARLOC 2012) 6th EditionDocument15 pagesPipeline and Riser Loss of Containment (PARLOC 2012) 6th EditionGUILLERMO ALEJANDRO ARMENDARIZ SALAS100% (1)
- Characteristics of A Good CurriculumDocument20 pagesCharacteristics of A Good CurriculumRICHARD ALFEO ORIGINALNo ratings yet
- 2 - Basic Theories of Gender PsychologyDocument20 pages2 - Basic Theories of Gender Psychologyergün ErgünNo ratings yet
- Human Freedo M: Manuel B. Dy, JRDocument30 pagesHuman Freedo M: Manuel B. Dy, JRFRITZI MAE GAPUZNo ratings yet
- ICT Basic Types of ComputerDocument7 pagesICT Basic Types of ComputerMomina B KhanNo ratings yet
- Wiring DM 1wDocument20 pagesWiring DM 1wAnan NasutionNo ratings yet
- SIM Ecosytem (Grade 6)Document26 pagesSIM Ecosytem (Grade 6)Donnaville Baja VildosolaNo ratings yet