You might also like
- Student Exploration: Uniform Circular MotionDocument5 pagesStudent Exploration: Uniform Circular MotionJoseph Chang80% (5)
- Cheat Sheet For Structures of MaterialsDocument1 pageCheat Sheet For Structures of MaterialsMiqdad RazaNo ratings yet
- Siemens Operator Manual-840DDocument88 pagesSiemens Operator Manual-840Dada040391No ratings yet
- Series 8000 Mill OperationDocument429 pagesSeries 8000 Mill OperationNumai EuNo ratings yet
- Machine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryFrom EverandMachine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryNo ratings yet
- Solution That I NeedDocument2 pagesSolution That I NeedYasar Ay33% (3)
- Module 2 Part 1Document147 pagesModule 2 Part 1FRANCIS THOMASNo ratings yet
- A Letter Engraving Custom MacroDocument15 pagesA Letter Engraving Custom Macrofirepower117No ratings yet
- ALL CNC Printouts PROGRAMS PRINTOUTDocument26 pagesALL CNC Printouts PROGRAMS PRINTOUTGajananNo ratings yet
- Electrical Diagram of MachineryDocument73 pagesElectrical Diagram of MachineryCarlos Jadán100% (1)
- Hass AnswersDocument7 pagesHass AnswersRelu ChiruNo ratings yet
- CNC Mill ProgrammingDocument24 pagesCNC Mill ProgrammingZahidah AmaninaNo ratings yet
- Lathe ProgramDocument6 pagesLathe ProgramAwoke TesfaNo ratings yet
- Doosan G76Document17 pagesDoosan G76Pham LongNo ratings yet
- CAD/CAM/CAE IntroductionDocument149 pagesCAD/CAM/CAE IntroductionalexiskandarNo ratings yet
- CNC Stands For Computer Numerical Control, And: G-Code. CNC Was Developed inDocument4 pagesCNC Stands For Computer Numerical Control, And: G-Code. CNC Was Developed inKhateeb Ul Islam QadriNo ratings yet
- Comparative Study of CNC Controllers Used in CNC Milling MachineDocument9 pagesComparative Study of CNC Controllers Used in CNC Milling MachineAJER JOURNALNo ratings yet
- CNC TurningDocument13 pagesCNC TurningJAMES JUDYNo ratings yet
- Introduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1Document11 pagesIntroduction To Introduction To Computer Numerical Control: Computer Aided Manufacturing TECH 4/53350 1BabuRaoThellaNo ratings yet
- PC Fapt BrochureDocument2 pagesPC Fapt Brochurebabak671No ratings yet
- Chapter Two 2. Manual NC Part ProgrammingDocument33 pagesChapter Two 2. Manual NC Part ProgrammingMulugeta WoldeNo ratings yet
- HaasLiveToolOpProgram - W - DS Manual PDFDocument70 pagesHaasLiveToolOpProgram - W - DS Manual PDFGuillermo RamirezNo ratings yet
- NC ProgrammingDocument54 pagesNC ProgrammingVed Vrat NuclearNo ratings yet
- Winstart-CKE6150-1500MM CNC Lathe OfferDocument12 pagesWinstart-CKE6150-1500MM CNC Lathe OfferSergio Salazar MarulandaNo ratings yet
- FANUC F0i-D Spec E-13 SpecificationsDocument14 pagesFANUC F0i-D Spec E-13 Specificationsmt7038No ratings yet
- CNC Common Terms PDFDocument2 pagesCNC Common Terms PDFShaival JhaNo ratings yet
- Get Started With Ultimax4Document189 pagesGet Started With Ultimax4Slobodan DimitrijevićNo ratings yet
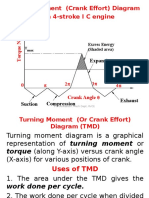
- Turning Moment Diagram & FlywheelDocument88 pagesTurning Moment Diagram & FlywheelAshishAgarwal100% (1)
- The Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Document10 pagesThe Use of Variables, Macros and Subroutines and Compatibility With FANUC Parametric Programming ......................... 3Jérôme GRANGENo ratings yet
- G Code FanukDocument5 pagesG Code FanukCucoș Marius MarianNo ratings yet
- Lazyturn Manual Rev 5Document49 pagesLazyturn Manual Rev 5s45rebatbnNo ratings yet
- User's Manual OverviewDocument789 pagesUser's Manual OverviewMACKAY9999No ratings yet
- MTB Tech BlogDocument41 pagesMTB Tech Blog이종훈No ratings yet
- Fanuc Lathe Programming GuideDocument93 pagesFanuc Lathe Programming Guidenguyenanhso100% (1)
- MasterCAM Cribbage Board and Drill PartDocument128 pagesMasterCAM Cribbage Board and Drill PartEduardo Felix Ramirez PalaciosNo ratings yet
- Fanuc TimelineDocument1 pageFanuc TimelinelosmilzoNo ratings yet
- Lect 10 Turning Programing Solved ProblemsDocument4 pagesLect 10 Turning Programing Solved Problemsomar tahaNo ratings yet
- TPA - Manual Tpaedi32 InterfaceDocument16 pagesTPA - Manual Tpaedi32 InterfaceuduwdjwNo ratings yet
- Leadwell NV-Serie 2015 PDFDocument8 pagesLeadwell NV-Serie 2015 PDFLevi BriceñoNo ratings yet
- CNC02 - DAY9-11 - Basic Turning ProgrammingDocument26 pagesCNC02 - DAY9-11 - Basic Turning Programmingmohammadarif afgan100% (1)
- Ch4capp AptDocument28 pagesCh4capp AptRajesh VermaNo ratings yet
- Maintenance Hurco (Kelompok 6)Document18 pagesMaintenance Hurco (Kelompok 6)Ilham Putra Prasetya SNo ratings yet
- Sinumerik 840D Solution Line Turning With ShopturnDocument68 pagesSinumerik 840D Solution Line Turning With ShopturnRMK BrothersNo ratings yet
- Android OpenGL 2.0 PDFDocument14 pagesAndroid OpenGL 2.0 PDFdalaran34100% (1)
- 11 Cad Cam CNC Programming MVVDocument37 pages11 Cad Cam CNC Programming MVVbassem smatiNo ratings yet
- Fanuc G68 Rotate Co-Ordinate System For Milling Program ExampleDocument3 pagesFanuc G68 Rotate Co-Ordinate System For Milling Program ExampleHarshal DhawasNo ratings yet
- NC ProgrammingDocument23 pagesNC ProgrammingAkash Byju100% (1)
- Puma Work Ejector Tip ReplacementDocument3 pagesPuma Work Ejector Tip ReplacementpaulNo ratings yet
- Series8000LatheOperation PDFDocument324 pagesSeries8000LatheOperation PDFSnaldo EstradaNo ratings yet
- Haas Mill WIPS Probe Training ManualDocument44 pagesHaas Mill WIPS Probe Training ManualpocerilloNo ratings yet
- Makino 3Document90 pagesMakino 3maneesh100% (1)
- CNC Programming Functions GuideDocument68 pagesCNC Programming Functions GuideJon Morales100% (1)
- CNC Programing ConceptDocument11 pagesCNC Programing ConceptGatot PrasetyoNo ratings yet
- Cam Lab ManualDocument14 pagesCam Lab Manualelangandhi0% (1)
- English - Lathe NGC - Operator's Manual - 2018Document456 pagesEnglish - Lathe NGC - Operator's Manual - 2018Francisco Salas GalvánNo ratings yet
- Haas G72 Type I Rough and G70 Finish Facing Program ExampleDocument3 pagesHaas G72 Type I Rough and G70 Finish Facing Program ExampleCnc Page100% (1)
- CNC Turning (Bridgeport)Document63 pagesCNC Turning (Bridgeport)Siti Idah TawhidNo ratings yet
- A Critical Review On Optimization of WEDM Process Using Taguchi ArrayDocument6 pagesA Critical Review On Optimization of WEDM Process Using Taguchi ArrayIJRASETPublicationsNo ratings yet
- NC, CNC & Robotics PDFDocument100 pagesNC, CNC & Robotics PDFSiddhrajsinh ZalaNo ratings yet
- FANUC 0M-A Interpolation and Canned CyclesDocument3 pagesFANUC 0M-A Interpolation and Canned CyclesSanchai ProgaeewNo ratings yet
- Ncguide CNC Simulator: Ncguide (E) - 01,2016.4, Printed in JapanDocument4 pagesNcguide CNC Simulator: Ncguide (E) - 01,2016.4, Printed in JapanIvo DimitrovNo ratings yet
- Solid modeling & Boolean operations quizDocument9 pagesSolid modeling & Boolean operations quizShubham NaikNo ratings yet
- In This Document: - 2-Wheel and 4-Wheel Drive - Add Item Requests Guidelines - Excluded Components - Safety EquipmentDocument5 pagesIn This Document: - 2-Wheel and 4-Wheel Drive - Add Item Requests Guidelines - Excluded Components - Safety EquipmentShubham NaikNo ratings yet
- Ijsrp p3621Document16 pagesIjsrp p3621JyotsanaTrivediNo ratings yet
- 131 43 DesignDocument13 pages131 43 DesignOkta FerliNo ratings yet
- Ie Q. BankDocument6 pagesIe Q. BankShubham NaikNo ratings yet
- 2 1Document1 page2 1Shubham NaikNo ratings yet
- Pumpjack BDocument0 pagesPumpjack BJusril A HidayatNo ratings yet
- Vector Calculus: A M4 Mini ProjectDocument16 pagesVector Calculus: A M4 Mini ProjectShubham NaikNo ratings yet
- Binary SystemDocument22 pagesBinary SystemShubham NaikNo ratings yet
- Roll List Te Osay 2021-22Document1 pageRoll List Te Osay 2021-22Shubham NaikNo ratings yet
- Beam Engine Mini ProjectDocument15 pagesBeam Engine Mini ProjectShubham Naik100% (1)
- Wind Turbines: Types and Momentum TheoryDocument4 pagesWind Turbines: Types and Momentum TheoryDanial KhanNo ratings yet
- Acoustics Module 3Document28 pagesAcoustics Module 3mariyaNo ratings yet
- Special DPP 2Document6 pagesSpecial DPP 2twinntower.9.11No ratings yet
- Seismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectDocument8 pagesSeismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectZeenat ShaikhNo ratings yet
- STP Math 2ADocument419 pagesSTP Math 2AYamin Wael ElattalNo ratings yet
- Gravitational EnergyDocument5 pagesGravitational EnergyFrederick David TombeNo ratings yet
- Schneider Electric EM6400NG PM2100 PM2200 logging MODBUS register mapDocument6 pagesSchneider Electric EM6400NG PM2100 PM2200 logging MODBUS register mapMowafq AlkhateebNo ratings yet
- GLY 405 - 20-21 - Pumping Tests - 20-21 - 5Document22 pagesGLY 405 - 20-21 - Pumping Tests - 20-21 - 5oluwafemi moyoNo ratings yet
- DLL - G8 Science - Q3 - F2FDocument2 pagesDLL - G8 Science - Q3 - F2FRAMIR BECOYNo ratings yet
- Miniature Coupling LOVEJOY PDFDocument12 pagesMiniature Coupling LOVEJOY PDFRafo Vega GuerovichNo ratings yet
- Complete Syllabus Test - 04: AnswersDocument16 pagesComplete Syllabus Test - 04: AnswerskavyareddyNo ratings yet
- Build and Turn Well Planning Methods: Plan Tab (Plan Editor Dialog)Document2 pagesBuild and Turn Well Planning Methods: Plan Tab (Plan Editor Dialog)sina giahkarNo ratings yet
- Applied Physics: Electric Charge Coulomb's LawDocument19 pagesApplied Physics: Electric Charge Coulomb's LawAhmadNo ratings yet
- EE331 - L06 - Signals & SystemsDocument18 pagesEE331 - L06 - Signals & Systemsahmetyasinbulut99No ratings yet
- Code-A: Aakash Tower, 8, Pusa Road, New Delhi-110005, Ph. 011-47623456Document48 pagesCode-A: Aakash Tower, 8, Pusa Road, New Delhi-110005, Ph. 011-47623456Sujit LawareNo ratings yet
- A. Mathematics: Civil Engineering Application ProblemDocument2 pagesA. Mathematics: Civil Engineering Application ProblemJULIE JAMERO DELIZO, JRNo ratings yet
- Teaching Material Physics Short Questions Class 10Document1 pageTeaching Material Physics Short Questions Class 10Umme AbdullahNo ratings yet
- Malware Infographics by SlidesgoDocument33 pagesMalware Infographics by SlidesgoAfryan ArdiansyahNo ratings yet
- I. Listen and Fill in The Missing Information. (10 Points) BackgroundDocument11 pagesI. Listen and Fill in The Missing Information. (10 Points) Background32.Nguyễn Thị Minh Trang - 8ANo ratings yet
- TAJE RES 2022 0129.R1 - Proof - HiDocument38 pagesTAJE RES 2022 0129.R1 - Proof - HiJaeysen CanilyNo ratings yet
- Aqtesolv Manual 5Document1 pageAqtesolv Manual 5Kevin Tang0% (1)
- Ain Shams University Thermal and Statistical Physics Problem Set 7 EntropyDocument2 pagesAin Shams University Thermal and Statistical Physics Problem Set 7 EntropyMR. Legend?No ratings yet
- Numerical Modelling of Rainfall Effects On The Stability of Soil SlopesDocument14 pagesNumerical Modelling of Rainfall Effects On The Stability of Soil SlopesAdarsh ChatraNo ratings yet
- 4.6 Method of ImagesDocument1 page4.6 Method of Images224883061No ratings yet
- Electrical Power Transmission 1Document5 pagesElectrical Power Transmission 1FaisalSoNo ratings yet
- Ocr Chemistry A2 Coursework Mark SchemeDocument8 pagesOcr Chemistry A2 Coursework Mark Schemeykzdmfajd100% (2)
- Shaft Alignment: A Guide to Proper Colinear AxesDocument13 pagesShaft Alignment: A Guide to Proper Colinear AxesBruno Gonzalez0% (1)