You might also like
- Gradient of A Scalar Field Curl of A Vector FieldDocument22 pagesGradient of A Scalar Field Curl of A Vector FieldULtraSwoRDFiSHNo ratings yet
- Unit07 CompleteDocument26 pagesUnit07 CompleteSRMUBARIK GamingNo ratings yet
- Engineering Physics L-2: (Electromagnetic Theory) Quantum MechanicsDocument18 pagesEngineering Physics L-2: (Electromagnetic Theory) Quantum MechanicsVijay ReddyNo ratings yet
- BasicMath VectorsDocument3 pagesBasicMath VectorsKoral ToptopNo ratings yet
- Vector AlgebraDocument2 pagesVector AlgebraIbn SinaNo ratings yet
- Unit - 3 ElectromagnetismDocument9 pagesUnit - 3 ElectromagnetismPavan KumarNo ratings yet
- Mechanics I: Statics: Force Vectors - Part BDocument17 pagesMechanics I: Statics: Force Vectors - Part BAlexander Appiah OkoreNo ratings yet
- VectorDocument10 pagesVector18008 K M ABDULLAH MAHMUD ZIADNo ratings yet
- Unit 02 Electromagnetic WaveDocument61 pagesUnit 02 Electromagnetic WaveEnglish words BY Utkarsh johriNo ratings yet
- M3 R20 - Unit-1Document63 pagesM3 R20 - Unit-1Krishna VenkatNo ratings yet
- Chapter11 VirtualWorkDocument10 pagesChapter11 VirtualWorkolyver.cavanNo ratings yet
- Vectors, Tensors, Indices and All That - .Document7 pagesVectors, Tensors, Indices and All That - .Aayush RajputNo ratings yet
- ETU Engineering Mechanics I 1 To 8Document184 pagesETU Engineering Mechanics I 1 To 8AidanNo ratings yet
- Unit 1 Force Systems PDFDocument17 pagesUnit 1 Force Systems PDFpeter vanderNo ratings yet
- Bwu Bta 22 187 MathDocument13 pagesBwu Bta 22 187 MathSayan SarkarNo ratings yet
- MX Eqn Notes DN FinalDocument16 pagesMX Eqn Notes DN Finalamankr1234amNo ratings yet
- CH 1 FinalDocument31 pagesCH 1 FinalaliNo ratings yet
- Lecture 2 - Description (00-12-01)Document50 pagesLecture 2 - Description (00-12-01)MahdiNo ratings yet
- GENERAL PHYSICS 1 Q1 Week 6Document25 pagesGENERAL PHYSICS 1 Q1 Week 6BABY LYN SOTTONo ratings yet
- Lect 28Document78 pagesLect 28Shahina OmarNo ratings yet
- Chapter 2 FinalDocument63 pagesChapter 2 Finalnida batoolNo ratings yet
- M3 R20 - Unit-1Document63 pagesM3 R20 - Unit-1sainadh upputhollaNo ratings yet
- 1.hafta-Fundamental Concepts and PrinciplesDocument37 pages1.hafta-Fundamental Concepts and PrinciplesplnozkbnNo ratings yet
- ElectrodynamicsDocument35 pagesElectrodynamicsRajuNo ratings yet
- Motion in PlaneDocument15 pagesMotion in PlaneKajol HNo ratings yet
- Chapter 2 Vectors and EquilibriumDocument6 pagesChapter 2 Vectors and EquilibriumMuhammad FarhanNo ratings yet
- Kinematics: Two and Three Dimensional Motion: Intended Learning Outcomes (Ilo)Document4 pagesKinematics: Two and Three Dimensional Motion: Intended Learning Outcomes (Ilo)RALPH ANDREW ESPERONNo ratings yet
- Motion in Plane NotesDocument9 pagesMotion in Plane NotesK S SayyedNo ratings yet
- Tensor Analysis - Copy To PDFDocument45 pagesTensor Analysis - Copy To PDFKAVYASKUMAR SKUMARNo ratings yet
- Schrödinger Wave Equation & OperatorsDocument56 pagesSchrödinger Wave Equation & OperatorsMuhammad ZeeshanNo ratings yet
- CH # 2 Vectors and EquilibriumDocument14 pagesCH # 2 Vectors and EquilibriumMehak MuradaniNo ratings yet
- VectorsDocument46 pagesVectorsmonika gompa100% (1)
- Sir Waqar PP NumericalsDocument17 pagesSir Waqar PP NumericalsMuhammad ArsalanNo ratings yet
- VectorsDocument27 pagesVectorsSuthara SudhakaranNo ratings yet
- Vector 1Document4 pagesVector 1Sanjay Mani TripathiNo ratings yet
- Full Math 102 NotesDocument104 pagesFull Math 102 NotesBrutus LutusNo ratings yet
- Electro Magnetic Field Theory NotesDocument149 pagesElectro Magnetic Field Theory NotesactuatorNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- Gen Phy 1 TCNHS Module 2Document11 pagesGen Phy 1 TCNHS Module 2Jasmine RamberNo ratings yet
- Chapter-1 VectorsDocument6 pagesChapter-1 VectorsMd Najmul HudaNo ratings yet
- Physics 11th Unit 2 KinematicsDocument31 pagesPhysics 11th Unit 2 Kinematicsvisiblemotivation7No ratings yet
- Physics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeDocument3 pagesPhysics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeFavourite MoviesNo ratings yet
- CBSE Class 11 Physics Chapter 4 Motion in A Plane Revision NotesDocument68 pagesCBSE Class 11 Physics Chapter 4 Motion in A Plane Revision Notesrazi sharifNo ratings yet
- Tutorial 1Document21 pagesTutorial 1kila122803No ratings yet
- Module 1 - EwDocument43 pagesModule 1 - EwMurtaza Hassan Bhat100% (1)
- Module 1 - EwDocument43 pagesModule 1 - EwMurtaza Hassan BhatNo ratings yet
- WEEK 5 Dot Product and WorkDocument10 pagesWEEK 5 Dot Product and Workmaria1345No ratings yet
- Chapter 2 Exercise Short QuestionsDocument5 pagesChapter 2 Exercise Short QuestionsOwais Sabir QureshiNo ratings yet
- Motion in A PlaneDocument18 pagesMotion in A PlaneVishwajeet KumarNo ratings yet
- A3 RelativityDocument24 pagesA3 Relativitybpsbhanu2233No ratings yet
- Chapter 6 VectorDocument14 pagesChapter 6 VectorEmir Emir SyaminNo ratings yet
- Robotics Lec3Document58 pagesRobotics Lec3aaNo ratings yet
- Chapter 1 Vector AnalysisDocument9 pagesChapter 1 Vector Analysisx9ph7zcjpvNo ratings yet
- Vector Notes (Year 1)Document23 pagesVector Notes (Year 1)alicia.milligan1107No ratings yet
- P1 Chp11 VectorsDocument29 pagesP1 Chp11 VectorsRizan RazakNo ratings yet
- Motion in A Plane: VectorsDocument44 pagesMotion in A Plane: Vectorsvedanth patilNo ratings yet
- Introduction To Mathematics of General RelativityDocument10 pagesIntroduction To Mathematics of General Relativityimanarrovi100% (2)
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- L4 - Engineering StaticsDocument12 pagesL4 - Engineering StaticsApostle ApostleNo ratings yet
- L1 Engineering Mechanics StaticsDocument10 pagesL1 Engineering Mechanics StaticsApostle ApostleNo ratings yet
- L2 - Engineering Mechanics Statics: Structural Analysis Simple TrussesDocument5 pagesL2 - Engineering Mechanics Statics: Structural Analysis Simple TrussesApostle ApostleNo ratings yet
- L3 Engineering Mechanics StaticsDocument9 pagesL3 Engineering Mechanics StaticsApostle ApostleNo ratings yet
- EE4533 Tutorial 10 Solutions PDFDocument9 pagesEE4533 Tutorial 10 Solutions PDFcheeling1530No ratings yet
- DDT-5 To 19 English ATS C057imsDocument17 pagesDDT-5 To 19 English ATS C057imsMayank GoyalNo ratings yet
- Clean Air Velocity TestDocument6 pagesClean Air Velocity TestO&E CeplNo ratings yet
- Electricity Shobhit Nirwan PDFDocument10 pagesElectricity Shobhit Nirwan PDFAbhishek97% (32)
- Summary SheetDocument4 pagesSummary SheetHaneen DweikatNo ratings yet
- Astm D2370Document4 pagesAstm D2370Florencia Müller100% (1)
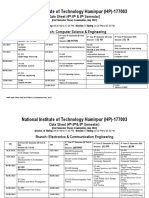
- National Institute of Technology Hamirpur (HP) - 177003: Date Sheet (4, 6 & 8 Semester)Document11 pagesNational Institute of Technology Hamirpur (HP) - 177003: Date Sheet (4, 6 & 8 Semester)sahil thakurNo ratings yet
- Design and Analysis of Power Generating Speed BreakerDocument23 pagesDesign and Analysis of Power Generating Speed BreakerIJRASETPublicationsNo ratings yet
- Hyper InverterDocument8 pagesHyper Inverteravik royNo ratings yet
- CIE626-Chapter-3-Energy ConceptsDocument30 pagesCIE626-Chapter-3-Energy ConceptsPatricio ChicaizaNo ratings yet
- 1.1 KritiScan 6040R 3DDocument2 pages1.1 KritiScan 6040R 3DChiluvuri VarmaNo ratings yet
- Bag FiltersDocument1 pageBag Filterskhan waqasNo ratings yet
- 2016-06 Advance Design Prilling BucketDocument2 pages2016-06 Advance Design Prilling BucketHaider AliNo ratings yet
- NDE On Threaed ConnectionDocument6 pagesNDE On Threaed ConnectionIvy LiNo ratings yet
- DRC Unit-1Document3 pagesDRC Unit-1Veerapathran MaruthachalamNo ratings yet
- ADM Physical Science Q2 Module 3Document23 pagesADM Physical Science Q2 Module 3EdenNo ratings yet
- Chapter Two: Geometric TolerancesDocument36 pagesChapter Two: Geometric Toleranceshiren_mistry55No ratings yet
- Xii Maths FormulasDocument35 pagesXii Maths FormulasGajendra Sagar100% (1)
- Bearing Frequency Data Bearing Frequency Data: He Craft Split BearingDocument2 pagesBearing Frequency Data Bearing Frequency Data: He Craft Split BearingramakrishnaNo ratings yet
- Product Data Sheet 6GK5104-2BB00-2AA3Document4 pagesProduct Data Sheet 6GK5104-2BB00-2AA3Eliseu Rodrigues PereiraNo ratings yet
- Insulating Systems For Repair Industry in AmericasDocument16 pagesInsulating Systems For Repair Industry in AmericasDragan NedićNo ratings yet
- Lec 1 - EE238 Electrical Engineering FundamentalDocument30 pagesLec 1 - EE238 Electrical Engineering FundamentalMohamed GamalNo ratings yet
- ABB - Siemens Robotics 6 Pole 1 Speed ReslverDocument2 pagesABB - Siemens Robotics 6 Pole 1 Speed ReslverServomotores SimairNo ratings yet
- Glo Sikacontrol Aer 200 PDocument4 pagesGlo Sikacontrol Aer 200 PKing MKNo ratings yet
- Homogeneous Function Euler's TheoremDocument2 pagesHomogeneous Function Euler's TheoremVivek GuptaNo ratings yet
- EV To Lux Conversion TablesDocument2 pagesEV To Lux Conversion TablesJJGNo ratings yet
- Class Xii Second Preboard PaperDocument6 pagesClass Xii Second Preboard PaperMuraliNo ratings yet
- Nuchprayoon 2018Document5 pagesNuchprayoon 2018chintan pandyaNo ratings yet
- Electricity MCQ'SDocument131 pagesElectricity MCQ'SSalik SalikNo ratings yet
- Aadhar Xerox Copy 2. Bank Passbook Xerox Copy 3. Passport Size Photo 2nos. 4. Mobile NumberDocument4 pagesAadhar Xerox Copy 2. Bank Passbook Xerox Copy 3. Passport Size Photo 2nos. 4. Mobile NumberBest Movie scenesNo ratings yet