You might also like
- QSC K8 K10 K12 KSub Service ManualDocument70 pagesQSC K8 K10 K12 KSub Service Manualboroda2410100% (7)
- QSC Audio Product Document Title Under 40 CharactersDocument8 pagesQSC Audio Product Document Title Under 40 Charactersjean grangeonNo ratings yet
- QSC k8 k10 k12 Ksub K Series SCHDocument22 pagesQSC k8 k10 k12 Ksub K Series SCHOscar Pacheco100% (4)
- An010 en PDFDocument15 pagesAn010 en PDFAnonymous Z1RHn9ENo ratings yet
- L6565 Quasi-Resonant Controller: November 2002Document35 pagesL6565 Quasi-Resonant Controller: November 2002Alberto MontillaNo ratings yet
- DC-DC Fast Input Slew RateDocument6 pagesDC-DC Fast Input Slew RateCarlos Agorreta ZafraNo ratings yet
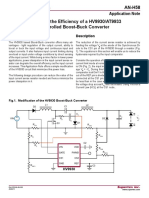
- AN-H58 Improving The Efficiency of A HV9930/AT9933 Controlled Boost-Buck ConverterDocument3 pagesAN-H58 Improving The Efficiency of A HV9930/AT9933 Controlled Boost-Buck ConverterJohnNo ratings yet
- Practical Circuitry For Measurement and Control ProblemsDocument40 pagesPractical Circuitry For Measurement and Control Problemsf_hayatiNo ratings yet
- Evaluation of TCM and CRCM Modulation For Totem Pole PFCDocument7 pagesEvaluation of TCM and CRCM Modulation For Totem Pole PFCMuhammad Arsalan FarooqNo ratings yet
- Chapter 7 Multi Vibrators and Wave Shaping CircuitsDocument8 pagesChapter 7 Multi Vibrators and Wave Shaping CircuitsJibril JundiNo ratings yet
- AN149f PDFDocument22 pagesAN149f PDFranjitheee1292No ratings yet
- TPS55340-Q1 Integrated 5-A, Wide Input Range Boost, SEPIC, or Flyback DC/DC ConverterDocument37 pagesTPS55340-Q1 Integrated 5-A, Wide Input Range Boost, SEPIC, or Flyback DC/DC ConverterMario RossiNo ratings yet
- Features Description: LTC7004 Fast 60V High Side NMOS Static Switch DriverDocument19 pagesFeatures Description: LTC7004 Fast 60V High Side NMOS Static Switch DriverLim VanthienNo ratings yet
- GAST - Gas Turbine Governor: LO1 Max Min Switch1 DF/DT 0Document4 pagesGAST - Gas Turbine Governor: LO1 Max Min Switch1 DF/DT 0MarcosNo ratings yet
- DC-DC ConvertersDocument134 pagesDC-DC ConvertersBELAJI BASIMNo ratings yet
- Basics of electric locomotive power and systemDocument23 pagesBasics of electric locomotive power and systemAshutosh Pandey100% (1)
- HV7355DB1 150V, 1.5A, Unipolar Ultrasound Pulser Demoboard: General DescriptionDocument9 pagesHV7355DB1 150V, 1.5A, Unipolar Ultrasound Pulser Demoboard: General DescriptionAhmed YasserNo ratings yet
- 110kV transmission line bill of materialDocument10 pages110kV transmission line bill of materialTuấn Anh NguyễnNo ratings yet
- Sboa 313 ADocument6 pagesSboa 313 AKaushlendra KumarNo ratings yet
- Non-Inverting Comparator With Hysteresis Circuit: Analog Engineer's Circuit: AmplifiersDocument6 pagesNon-Inverting Comparator With Hysteresis Circuit: Analog Engineer's Circuit: AmplifiersmohamadziNo ratings yet
- Relaxation Oscillator Circuit: Analog Engineer's Circuit: AmplifiersDocument5 pagesRelaxation Oscillator Circuit: Analog Engineer's Circuit: AmplifiersMammeri ElhachemiNo ratings yet
- Standard Linear and Logic Computing Solutions: David YaegerDocument92 pagesStandard Linear and Logic Computing Solutions: David Yaegersluz2000000No ratings yet
- TL032CDocument63 pagesTL032Cameer_jaburNo ratings yet
- Mi21mtech11003 - BM5023 - 2021 - Lab 2Document7 pagesMi21mtech11003 - BM5023 - 2021 - Lab 2Subhranil RoyNo ratings yet
- TL2843B Q1 etcTIDocument18 pagesTL2843B Q1 etcTIrahma jayaNo ratings yet
- LM 5010Document32 pagesLM 5010ed251No ratings yet
- How To Measure The Control Loop of DCS-Control™ DevicesDocument5 pagesHow To Measure The Control Loop of DCS-Control™ DevicesZamfirMarianNo ratings yet
- Slua 923Document10 pagesSlua 923david reyesNo ratings yet
- Click To Add Text Click To Add TextDocument23 pagesClick To Add Text Click To Add TextNoor SabaNo ratings yet
- Opamp TIDocument5 pagesOpamp TIAmogh Gajaré100% (1)
- How To Reduce Current Spikes at AC Zero-Crossing For Totem-Pole PFCDocument6 pagesHow To Reduce Current Spikes at AC Zero-Crossing For Totem-Pole PFCdiablo diablolordNo ratings yet
- H2PToday1806_design_TexasInstruments_Part 5Document10 pagesH2PToday1806_design_TexasInstruments_Part 5lcisnydeksdtaujutlNo ratings yet
- New IHR IGBT TechnologyDocument4 pagesNew IHR IGBT TechnologyvittorioNo ratings yet
- Tps 24713Document40 pagesTps 24713zomya kulkarniNo ratings yet
- Circuit Idea 20211104Document2 pagesCircuit Idea 20211104Nilay Ceren ÖZTÜRKNo ratings yet
- Answitch PDFDocument16 pagesAnswitch PDFAshok KumarNo ratings yet
- Module-3 (DC Chopper)Document76 pagesModule-3 (DC Chopper)Prasann KatiyarNo ratings yet
- L6565 Quasi-Resonant ControllerDocument28 pagesL6565 Quasi-Resonant ControllerboipouNo ratings yet
- Design Considerations Bidirectional DC DC ConvertersDocument9 pagesDesign Considerations Bidirectional DC DC ConvertersHernandaBudiSantosoNo ratings yet
- Biasing Requirements For TXS, TXB, and LSF Auto-Bidirectional TranslatorsDocument7 pagesBiasing Requirements For TXS, TXB, and LSF Auto-Bidirectional TranslatorsspotNo ratings yet
- Totem-Pole Paper - 0Document9 pagesTotem-Pole Paper - 0wartchev39No ratings yet
- CircuitsDocument41 pagesCircuitsriajulNo ratings yet
- Practical Feedback Loop Design Considerations For Flyback Converter Using UCC28740Document7 pagesPractical Feedback Loop Design Considerations For Flyback Converter Using UCC28740jay lowkeyNo ratings yet
- DC Motor Drive: Power ElectronicsDocument19 pagesDC Motor Drive: Power ElectronicsRishabh MalpotraNo ratings yet
- Design high frequency push-pull DC/DC converterDocument5 pagesDesign high frequency push-pull DC/DC converterEdoardoNo ratings yet
- LM25085A 42V Constant On-Time PFET Buck Switching Controller With 0.9V ReferenceDocument31 pagesLM25085A 42V Constant On-Time PFET Buck Switching Controller With 0.9V ReferenceStuxnetNo ratings yet
- AN017 Switching Mode Power SupplyDocument6 pagesAN017 Switching Mode Power SupplyHerbert LopesNo ratings yet
- T 10-B Lvds T V: Riple IT Ransmitter FOR IdeoDocument11 pagesT 10-B Lvds T V: Riple IT Ransmitter FOR IdeoDavid MontielNo ratings yet
- Application Note AN-1121: Practical Layout For Current Sensing Circuit of IRMCF300 Series ICDocument14 pagesApplication Note AN-1121: Practical Layout For Current Sensing Circuit of IRMCF300 Series ICHaris AmrullahNo ratings yet
- LT1016Document20 pagesLT1016api-3825669No ratings yet
- Jeong2015 PDFDocument4 pagesJeong2015 PDFAli ErNo ratings yet
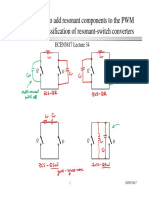
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDocument11 pagesPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyNo ratings yet
- On Load Single Phase Solid State Tap ChangerDocument5 pagesOn Load Single Phase Solid State Tap ChangerArmandinho CaveroNo ratings yet
- High Efficiency 10A Synchronous Buck Converter: Features General DescriptionDocument2 pagesHigh Efficiency 10A Synchronous Buck Converter: Features General DescriptionDanielle ButlerNo ratings yet
- Isl6115a DST 20040317Document10 pagesIsl6115a DST 20040317Muhammad Januar SusantoNo ratings yet
- Chapter 5 MultivibratorsDocument9 pagesChapter 5 MultivibratorsRofiq NuryakinNo ratings yet
- Power Supply Trainer Using Lm723 IcDocument8 pagesPower Supply Trainer Using Lm723 IcDinesh Kumar MehraNo ratings yet
- AN4104 Forward Converter Type PC SMPS With FPS: Sangtae-Im PD DivisionDocument17 pagesAN4104 Forward Converter Type PC SMPS With FPS: Sangtae-Im PD DivisionJose Miguel Rodriguez CarreñoNo ratings yet
- Diseño output ripple en DCDCDocument10 pagesDiseño output ripple en DCDCherraezjorge8No ratings yet
- ECN3297TF HitachiDocument17 pagesECN3297TF HitachiachillesNo ratings yet
- Troubleshooting TCD Codes for MUSE ED InvertersDocument11 pagesTroubleshooting TCD Codes for MUSE ED InvertersMoises PerelloNo ratings yet
- AN1059Document20 pagesAN1059rlevrinoNo ratings yet
- Battery Cell Balancing GuideDocument8 pagesBattery Cell Balancing GuidelitieuduyNo ratings yet
- Switching FETs and the Importance of Dead Time ControlDocument3 pagesSwitching FETs and the Importance of Dead Time Controljean grangeonNo ratings yet
- Understanding Dead-Time Based On TPS51225/275/285: Application ReportDocument10 pagesUnderstanding Dead-Time Based On TPS51225/275/285: Application Reportjean grangeonNo ratings yet
- IR Audio Product GuideDocument8 pagesIR Audio Product Guidejean grangeonNo ratings yet
- DC to DC Converter Circuit 1400W Using SG3525 ICDocument2 pagesDC to DC Converter Circuit 1400W Using SG3525 ICjean grangeonNo ratings yet
- Infineon AN1198 BridgingDocument12 pagesInfineon AN1198 Bridgingjean grangeonNo ratings yet
- IRFI4024H-117P: DescriptionDocument6 pagesIRFI4024H-117P: Descriptionjean grangeonNo ratings yet
- IRF DatasheetDocument7 pagesIRF DatasheetJohn ForeroNo ratings yet
- MAX220-MAX249 +5V-Powered, Multichannel RS-232 Drivers/ReceiversDocument39 pagesMAX220-MAX249 +5V-Powered, Multichannel RS-232 Drivers/ReceiversHugo SantanaNo ratings yet
- Irfi4212h 117pDocument7 pagesIrfi4212h 117pAbdul KurniadiNo ratings yet
- Irfi4212h 117pDocument7 pagesIrfi4212h 117pAbdul KurniadiNo ratings yet
- Philips G90-AEDocument9 pagesPhilips G90-AEaulin64_845645735No ratings yet
- Infineon Irs20957spbf Ds v01 02 enDocument18 pagesInfineon Irs20957spbf Ds v01 02 enLindomar ChavesNo ratings yet
- Schematic - TOTEMPOLE BALAP - Sheet - 1 - 20190930201614Document1 pageSchematic - TOTEMPOLE BALAP - Sheet - 1 - 20190930201614jean grangeonNo ratings yet
- LED circuit board component layoutDocument1 pageLED circuit board component layoutjean grangeonNo ratings yet
- Philips G90-AEDocument9 pagesPhilips G90-AEaulin64_845645735No ratings yet
- Iraudamp6: 250W/8 X 2 Channel Class D Audio Power Amplifier Using The IRS20957S and IRF6785Document46 pagesIraudamp6: 250W/8 X 2 Channel Class D Audio Power Amplifier Using The IRS20957S and IRF6785jean grangeonNo ratings yet
- Specification IC DK124 PDFDocument7 pagesSpecification IC DK124 PDFordamNo ratings yet
- VIPER22ADocument15 pagesVIPER22ACleber MouraNo ratings yet
- Philips G90-AEDocument9 pagesPhilips G90-AEaulin64_845645735No ratings yet
- Umwd 06516a XDHDocument3 pagesUmwd 06516a XDHИван ФиличевNo ratings yet
- Wireless Remote Control for Underwater VehiclesDocument32 pagesWireless Remote Control for Underwater Vehiclesajacks504No ratings yet
- Modbus Hexadecimal Address (Master) - RTU / ASCII Mode Delta A. HMI Factory SettingsDocument2 pagesModbus Hexadecimal Address (Master) - RTU / ASCII Mode Delta A. HMI Factory SettingsryoNo ratings yet
- Multimedia - LECTURE 3Document37 pagesMultimedia - LECTURE 3Hemed hafidhNo ratings yet
- Faw1 PDFDocument2 pagesFaw1 PDFSavita BhabhiNo ratings yet
- Internship Report ModelDocument3 pagesInternship Report Modelo7bu046No ratings yet
- Wimax Is Defined As Worldwide Interoperability For Microwave Access by TheDocument27 pagesWimax Is Defined As Worldwide Interoperability For Microwave Access by Thensharanab4No ratings yet
- Phone Genesys ConfigurationDocument22 pagesPhone Genesys ConfigurationRodolfo TobiasNo ratings yet
- 11.2.1 Packet Tracer - Configure and Verify eBGP - ILM TraducidoDocument4 pages11.2.1 Packet Tracer - Configure and Verify eBGP - ILM TraducidoCrisgamerGDNo ratings yet
- IoT barriers agricultureDocument6 pagesIoT barriers agricultureSatyam BhardwajNo ratings yet
- Annex F - VHF Antenna - MD70-SRT-NTYPE DataDocument2 pagesAnnex F - VHF Antenna - MD70-SRT-NTYPE DataAhmed EidNo ratings yet
- SCADAPack 470 User ManualDocument134 pagesSCADAPack 470 User ManualLászló LósNo ratings yet
- Technical Manual - C&C08 Digital Switching System Chapter 2 OverviewDocument19 pagesTechnical Manual - C&C08 Digital Switching System Chapter 2 OverviewSamuel100% (2)
- (Nokia) MoP NB Over TDMDocument20 pages(Nokia) MoP NB Over TDMKiar JuniorNo ratings yet
- Service LIS2-ADocument11 pagesService LIS2-ASmart BiomedicalNo ratings yet
- PDVD700 Portable DVD Player Quickstart GuideDocument19 pagesPDVD700 Portable DVD Player Quickstart GuideGavinNo ratings yet
- Indian Institute of Information Technology Tiruchirappalli Department of Electronics and Communication EngineeringDocument3 pagesIndian Institute of Information Technology Tiruchirappalli Department of Electronics and Communication EngineeringANITHA MNo ratings yet
- WLAN Physical Layer (Including Wireless Ethernet Frame Structure)Document23 pagesWLAN Physical Layer (Including Wireless Ethernet Frame Structure)Sandy ZakariaNo ratings yet
- Master'S Thesis: Performance Measurements of Bluetooth 5 Technique Under InterferenceDocument59 pagesMaster'S Thesis: Performance Measurements of Bluetooth 5 Technique Under InterferenceГеорги НасковNo ratings yet
- Fisa Tehnica Camera Supraveghere IP Wireless Dahua IPC-HFW1435S-W 4 MP IR 30 M 2.8 MM 16x 1Document2 pagesFisa Tehnica Camera Supraveghere IP Wireless Dahua IPC-HFW1435S-W 4 MP IR 30 M 2.8 MM 16x 1DanielTeglasNo ratings yet
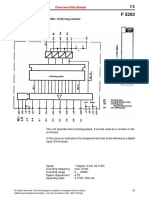
- Overview Data Sheets: F 5203: 14 Bit Ring CounterDocument2 pagesOverview Data Sheets: F 5203: 14 Bit Ring CountermohamadziNo ratings yet
- EMC Troubleshooting KitDocument6 pagesEMC Troubleshooting KitDirkNo ratings yet
- Cta12 14 BomDocument6 pagesCta12 14 BomIstván GerencsérNo ratings yet
- Nokia VoLTE Lessons From The Field White PaperDocument7 pagesNokia VoLTE Lessons From The Field White PaperBeliever0% (2)
- Huawei BTS 3900 Technical DescriptionDocument212 pagesHuawei BTS 3900 Technical DescriptionKrishanth Ppt87% (15)
- 114A4993 My Home Bridge ChamberlainDocument12 pages114A4993 My Home Bridge ChamberlainmichelleNo ratings yet
- Home Modem - Internet - Installation - Guide - CGN-RESDocument8 pagesHome Modem - Internet - Installation - Guide - CGN-RESAnthony HansonNo ratings yet
- FRENZEL3E - INSTRUCTORS MANUAL PartC - 01Document48 pagesFRENZEL3E - INSTRUCTORS MANUAL PartC - 01americo079No ratings yet
- ECE216Document2 pagesECE216Aryan GourNo ratings yet
- Ale Edi IdocDocument4 pagesAle Edi IdocPILLINAGARAJUNo ratings yet