You might also like
- 01 Basics in Manual TherapyDocument74 pages01 Basics in Manual TherapynoorNo ratings yet
- Kinesiology: Chapter 1: Kinematics Joint MovementsDocument4 pagesKinesiology: Chapter 1: Kinematics Joint MovementsCrescent LazoNo ratings yet
- Kinesiology: Chapter 1: Kinematics Joint MovementsDocument4 pagesKinesiology: Chapter 1: Kinematics Joint MovementsCrescent LazoNo ratings yet
- Lecture 3 (Introduction & Basic Principles of Range of Motion)Document19 pagesLecture 3 (Introduction & Basic Principles of Range of Motion)fkjujNo ratings yet
- Ch1 KinesiologyDocument26 pagesCh1 KinesiologyBharani DaranNo ratings yet
- Principles of Malunion ManagementDocument51 pagesPrinciples of Malunion Managementdioz100% (1)
- Biomechanics of The Knee: Tibiofemoral JointDocument7 pagesBiomechanics of The Knee: Tibiofemoral JointManuel Azael Rodríguez CigalaNo ratings yet
- 1st-Introduction To Anatomy1Document30 pages1st-Introduction To Anatomy1prasun_vNo ratings yet
- 4 JointsDocument47 pages4 JointsFareez HamidNo ratings yet
- Biomechanics of JointsDocument15 pagesBiomechanics of JointsRavneet singhNo ratings yet
- JointsDocument1 pageJointsHarry PariharNo ratings yet
- Biomecânica Cervical RamieriDocument15 pagesBiomecânica Cervical RamierirewassallfotosNo ratings yet
- Radiology Skeletal Trauma: DR B.B.Gosai July 2013Document48 pagesRadiology Skeletal Trauma: DR B.B.Gosai July 2013riddhiNo ratings yet
- Lec 2 Basics of MT 23022023 030157pmDocument55 pagesLec 2 Basics of MT 23022023 030157pmNeha EjazNo ratings yet
- Manual 2Document4 pagesManual 2Ahmar SarwarNo ratings yet
- Osteopathic Glossary PDFDocument64 pagesOsteopathic Glossary PDFPaoloNo ratings yet
- Body Movements and ArticulationsDocument12 pagesBody Movements and ArticulationsSurya DilaNo ratings yet
- 01introduction SkeletonDocument12 pages01introduction Skeletonapi-19641337No ratings yet
- This Study Resource WasDocument3 pagesThis Study Resource WasdanNo ratings yet
- Joint: It Is The Site Where Two or More Bones Come Together, Where There Is Movement or NotDocument20 pagesJoint: It Is The Site Where Two or More Bones Come Together, Where There Is Movement or Notrabia ToorNo ratings yet
- Joint Classification, Oesteokinematics and ArthrokinematicsDocument4 pagesJoint Classification, Oesteokinematics and ArthrokinematicsAminath YamaanyNo ratings yet
- Lec 20 GoniometryDocument165 pagesLec 20 GoniometryBhargavNo ratings yet
- Kine 3301 Anatomy Exam ReviewDocument1 pageKine 3301 Anatomy Exam Reviewsep91No ratings yet
- Post Rehab Essentials - SpineDocument21 pagesPost Rehab Essentials - SpineGabriel ArnoldNo ratings yet
- Helical Axes of Skeletal Knee Joint Motion During RunningDocument8 pagesHelical Axes of Skeletal Knee Joint Motion During RunningWilliam VenegasNo ratings yet
- UntitledDocument7 pagesUntitledFahim Abarar KhanNo ratings yet
- Unit - 3 B. Physiotherapy (Pt201) Subject: Basic of BiomechanicsDocument15 pagesUnit - 3 B. Physiotherapy (Pt201) Subject: Basic of BiomechanicsAKASHDEEP SINGHNo ratings yet
- GONIOMETRYDocument28 pagesGONIOMETRYnn2dgdypkcNo ratings yet
- ANAT20006 2020: MSK Practice Quiz Short Answer Question Model AnswersDocument3 pagesANAT20006 2020: MSK Practice Quiz Short Answer Question Model AnswersJenniferChenNo ratings yet
- 1-2 Ka 6 Classification of Joints - Anatomy & PhysiologyDocument11 pages1-2 Ka 6 Classification of Joints - Anatomy & Physiologyaj100% (1)
- Anatomy and Biomechanics of TH Musculo Skeletal SystemDocument1 pageAnatomy and Biomechanics of TH Musculo Skeletal SystemJane JaneyNo ratings yet
- Joint Classification SummaryDocument3 pagesJoint Classification SummaryLewis RamosNo ratings yet
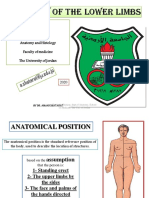
- Anatomy of The Lower LimbsDocument23 pagesAnatomy of The Lower LimbsMoaiadHusseinNo ratings yet
- 36 Reading RapoffDocument11 pages36 Reading RapoffFanica ScarlatNo ratings yet
- Rehabilitation Progressions: Range of Motion ProgressionDocument30 pagesRehabilitation Progressions: Range of Motion ProgressionSiti FahwizaNo ratings yet
- Inroduction of Arthrology - Ruan-2015Document45 pagesInroduction of Arthrology - Ruan-2015Kw ChanNo ratings yet
- OrthosisDocument112 pagesOrthosisChandan MahapatraNo ratings yet
- Biomechanics of The Shoulder: Dennis L. Hart, Mpa, PT, Stephen W. Carmichael, PHDTDocument6 pagesBiomechanics of The Shoulder: Dennis L. Hart, Mpa, PT, Stephen W. Carmichael, PHDTPrem KumarNo ratings yet
- The Convex Concave Rule and The Lever LawDocument4 pagesThe Convex Concave Rule and The Lever LawOwais KhanNo ratings yet
- Mechanics of Movement: Tissues and Structures InvolvedDocument31 pagesMechanics of Movement: Tissues and Structures Involveddean_tsipiNo ratings yet
- PTR2007 Lecture 1Document83 pagesPTR2007 Lecture 1erfan mohammadiNo ratings yet
- Salem 201Document6 pagesSalem 201mikelNo ratings yet
- Goniometry: GONIA - Angle METRON - MeasureDocument26 pagesGoniometry: GONIA - Angle METRON - Measurejack sparrowNo ratings yet
- P.E 204 Analysis of Human MotionDocument19 pagesP.E 204 Analysis of Human MotionJosua RiveroNo ratings yet
- Classificationofjoints 140413054157 Phpapp01 161023170805Document49 pagesClassificationofjoints 140413054157 Phpapp01 161023170805Adu-danquah StephenNo ratings yet
- Elbow Dislocation Orthoinfo AaosDocument4 pagesElbow Dislocation Orthoinfo AaosAnonymous L9D1I7DZNo ratings yet
- Preparation Tasks - Week 5Document6 pagesPreparation Tasks - Week 5Άγγελος ΧαβέλαςNo ratings yet
- Back & Joints - AnatomyDocument9 pagesBack & Joints - AnatomyNatalia ArdilaNo ratings yet
- UntitledDocument89 pagesUntitledJemma PriestNo ratings yet
- Anatomical TerminologyDocument3 pagesAnatomical TerminologyRura DangaNo ratings yet
- Pronation Supination1Document7 pagesPronation Supination1José Enrique Castillo NavaNo ratings yet
- Condition Chart Shoulder ImpingementDocument18 pagesCondition Chart Shoulder Impingementapi-547889945No ratings yet
- Kinematics of The Ankle and Foot.Document31 pagesKinematics of The Ankle and Foot.Sneha ParveenNo ratings yet
- Functional Anatomy of The Lumbar SpineDocument7 pagesFunctional Anatomy of The Lumbar Spinealejo_buitragoNo ratings yet
- Biomechanics of Elbow JointDocument10 pagesBiomechanics of Elbow JointGeddam SnehalathaNo ratings yet
- Core 2 - The Body in Motion: Year 11 PDHPEDocument30 pagesCore 2 - The Body in Motion: Year 11 PDHPEbingNo ratings yet
- Artrodesis RodillaDocument5 pagesArtrodesis RodillaMom of twoNo ratings yet
- Archery Anatomy: An Introduction to Techniques for Improved PerformanceFrom EverandArchery Anatomy: An Introduction to Techniques for Improved PerformanceRating: 4 out of 5 stars4/5 (1)
- Improving Ankle and Knee Joint Stability: Proprioceptive Balancefit Discs DrillsFrom EverandImproving Ankle and Knee Joint Stability: Proprioceptive Balancefit Discs DrillsNo ratings yet
- Orthopaedics and Trauma for Medical Students and Junior ResidentsFrom EverandOrthopaedics and Trauma for Medical Students and Junior ResidentsRating: 5 out of 5 stars5/5 (3)
- Applied Biomechanics Webinar Video: Breakdown of Topics With TimestampsDocument16 pagesApplied Biomechanics Webinar Video: Breakdown of Topics With TimestampsJoaquin Napoleon QuejadaNo ratings yet
- Good Posture and How It Can Be Achieved: IntroDocument34 pagesGood Posture and How It Can Be Achieved: IntroJoaquin Napoleon QuejadaNo ratings yet
- Johnson Postural Assessment GuideDocument11 pagesJohnson Postural Assessment GuideJoaquin Napoleon QuejadaNo ratings yet
- Motor Control Theories: What Is A Class On Motor Control About?Document7 pagesMotor Control Theories: What Is A Class On Motor Control About?Joaquin Napoleon QuejadaNo ratings yet
- Catalogo FirestoneDocument8 pagesCatalogo Firestonedionisio emilio reyes jimenezNo ratings yet
- 11 Physics Chapter 14 and 15 Assignment 1Document2 pages11 Physics Chapter 14 and 15 Assignment 1nellai kumarNo ratings yet
- 6.1. Principles of Size ReductionDocument2 pages6.1. Principles of Size ReductionXxxNo ratings yet
- Lecture 2 Processes and Process VariablesDocument56 pagesLecture 2 Processes and Process VariableskietniNo ratings yet
- AOE 5104 Assignment 6 Solution: GroundDocument7 pagesAOE 5104 Assignment 6 Solution: GroundHossam T BadranNo ratings yet
- Cambridge IGCSE: Physics 0625/21Document16 pagesCambridge IGCSE: Physics 0625/21Vaibhav reddyNo ratings yet
- RPC Assignment 2Document4 pagesRPC Assignment 2Jericho MarianoNo ratings yet
- BE Lecture 9 Lateral Load Resisting SystemsDocument13 pagesBE Lecture 9 Lateral Load Resisting SystemsAnil BasnetNo ratings yet
- The History of The Atom Notes - CondensedDocument6 pagesThe History of The Atom Notes - CondensedOin Levney Tecson100% (1)
- Theory: Projectile MotionDocument3 pagesTheory: Projectile Motionarqam karimNo ratings yet
- The Life of Albert EinsteinDocument12 pagesThe Life of Albert Einsteinkomal barotNo ratings yet
- Introduction To Finite Element Method: 1D Steady State Conservation LawsDocument49 pagesIntroduction To Finite Element Method: 1D Steady State Conservation LawsIbsonhNo ratings yet
- Application of Molecular Absorption SpectrosDocument52 pagesApplication of Molecular Absorption SpectrosVeliana Teta100% (1)
- Physics Answer KeyDocument8 pagesPhysics Answer KeyMichael Alex MabaoNo ratings yet
- Rec1 Soln QM2015Document4 pagesRec1 Soln QM2015Mena AwanNo ratings yet
- Characteristics of Culture UcspDocument8 pagesCharacteristics of Culture UcspRhenczell Angela VelascoNo ratings yet
- It o Integral and It o - Doeblin Formula Stochastic Differential EquationsDocument3 pagesIt o Integral and It o - Doeblin Formula Stochastic Differential EquationsTấn Vũ HuỳnhNo ratings yet
- SPM Chemistry Form 4 NotesDocument10 pagesSPM Chemistry Form 4 NotesPrakash VeenPunk100% (1)
- Brian Cox - Formatted - UpdatedDocument4 pagesBrian Cox - Formatted - Updatedعمار مصعب عادلNo ratings yet
- Astronomy Final Exam ReviewDocument2 pagesAstronomy Final Exam Reviewncl12142No ratings yet
- FlourimetryDocument39 pagesFlourimetrythamizh555No ratings yet
- Physics Chap 3 F5 !!!!!!!!!!!Document46 pagesPhysics Chap 3 F5 !!!!!!!!!!!Ethan Dharshen100% (1)
- MMC 1Document16 pagesMMC 1Manjunath ShettarNo ratings yet
- BondingDocument10 pagesBondingIrene Nindita PradnyaNo ratings yet
- The Kinetics of Combination Carbon Dioxide With Hydroxide IonsDocument9 pagesThe Kinetics of Combination Carbon Dioxide With Hydroxide Ionsmppatilmayur1679No ratings yet
- Forces and Newton'S Laws of Motion: ProblemsDocument67 pagesForces and Newton'S Laws of Motion: ProblemsangelicaNo ratings yet
- Ultra Important Sheets: Atharva AggarwalDocument8 pagesUltra Important Sheets: Atharva AggarwalMalvi RukwalNo ratings yet
- Thermowell Calculation GuideDocument19 pagesThermowell Calculation Guideprasanthk22No ratings yet
- Intro Optics - PPT V2part 05Document45 pagesIntro Optics - PPT V2part 05buffmomNo ratings yet
- Effect of Structure-Directing Agent On AlPO4-n Synthesis From Aluminum DrossDocument5 pagesEffect of Structure-Directing Agent On AlPO4-n Synthesis From Aluminum DrossXantos YulianNo ratings yet