You might also like
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- IptDocument44 pagesIptrupaNo ratings yet
- Circle Diagram of Induction MotorDocument6 pagesCircle Diagram of Induction MotorsrikanthukNo ratings yet
- DQ Modeling of SEIG in SimulinkDocument5 pagesDQ Modeling of SEIG in SimulinkBhushan MankarNo ratings yet
- Emlab 2Document21 pagesEmlab 2hafizrahimmitNo ratings yet
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonDocument8 pagesLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarNo ratings yet
- Mathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryDocument10 pagesMathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryjhonnydesaNo ratings yet
- Starting Methods of 1-Phase & 3-Phase IMs - 100255KDocument14 pagesStarting Methods of 1-Phase & 3-Phase IMs - 100255KChamath Kirinde100% (2)
- 907continuous & Discontinuous Conduction of DC MotorDocument21 pages907continuous & Discontinuous Conduction of DC MotorMary Morse0% (1)
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDocument7 pagesEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNo ratings yet
- Matlab Simulation of An Induction Motor Using Simuling by MagximDocument77 pagesMatlab Simulation of An Induction Motor Using Simuling by MagximMaximilian SylvesterNo ratings yet
- Design of A Bearingless BLDC MotorDocument6 pagesDesign of A Bearingless BLDC MotorTien Dung TranNo ratings yet
- AC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepDocument5 pagesAC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepQusai JamalNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Task 4: Figure 1 Speed-Torque Curve For Ideal DC MotorDocument19 pagesTask 4: Figure 1 Speed-Torque Curve For Ideal DC MotoraqeelNo ratings yet
- Dynamic Model of Asynchronous Machine: Conference PaperDocument5 pagesDynamic Model of Asynchronous Machine: Conference PaperMahari MohamedNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- Calculation of Induction Motor Starting Parameters Using MatlabDocument6 pagesCalculation of Induction Motor Starting Parameters Using MatlabДејан ПејовскиNo ratings yet
- Speed Control of Three Phase Induction MotorDocument8 pagesSpeed Control of Three Phase Induction MotorsasNo ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- AJITIIIIIIIDocument20 pagesAJITIIIIIIIValin paruNo ratings yet
- Etd Lab3Document10 pagesEtd Lab3Isaya KawanaNo ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- Salimin2013 PDFDocument5 pagesSalimin2013 PDFAhmad RobbyNo ratings yet
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocument6 pagesDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNo ratings yet
- Park's Vector Approach For Online Fault Diagnosis of Induction MotorDocument7 pagesPark's Vector Approach For Online Fault Diagnosis of Induction Motoritcmiguel100% (1)
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Three Phase Inductioin Motor Test AhmedDocument9 pagesThree Phase Inductioin Motor Test Ahmedmearggebremedhin2013No ratings yet
- BLDC: Motor FailureDocument5 pagesBLDC: Motor FailureInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- Literature Review On Star Delta StarterDocument7 pagesLiterature Review On Star Delta Startertbwrxxvkg100% (1)
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Energies: Vectorized Mathematical Model of A Slip-Ring Induction MotorDocument20 pagesEnergies: Vectorized Mathematical Model of A Slip-Ring Induction MotorYugendran KumaravelNo ratings yet
- Electrical Machines-II Units-III & IV Questions and AnswersDocument4 pagesElectrical Machines-II Units-III & IV Questions and AnswersJoseph Harindranath100% (2)
- Wound Rotor Induction MotorDocument4 pagesWound Rotor Induction MotorAnonymous zeISoBNo ratings yet
- Study of Dynamic Behavior of Grid Connected Induction GeneratorsDocument6 pagesStudy of Dynamic Behavior of Grid Connected Induction GeneratorsvenkyiiscNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Braking Schemes of TractionDocument7 pagesBraking Schemes of TractionSuraj BhushanNo ratings yet
- Title:To Practically Configuration and Characteristic ofDocument14 pagesTitle:To Practically Configuration and Characteristic ofKelvin YipNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- Mathematical Modeling and Analysis of Different VeDocument13 pagesMathematical Modeling and Analysis of Different Veramadhanifarahum19No ratings yet
- Template: Manual: Complex Engineering ProblemDocument10 pagesTemplate: Manual: Complex Engineering ProblemKASHIF zamanNo ratings yet
- Induction Motor Tests & Equivalent Circuit ParametersDocument3 pagesInduction Motor Tests & Equivalent Circuit ParametersU TurnNo ratings yet
- Chapter 4 and 5 QuastionDocument10 pagesChapter 4 and 5 Quastionbekabeki829No ratings yet
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- 936E WHEEL LOADER 33Z03091-UP (MACHINE) POWERED BY 3304 ENGINE (SEBP1761 - 02) - Systems & Compon54entsDocument17 pages936E WHEEL LOADER 33Z03091-UP (MACHINE) POWERED BY 3304 ENGINE (SEBP1761 - 02) - Systems & Compon54entsTransportation MaintananceNo ratings yet
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010No ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
- Soft-started Induction Motor Modeling and Heating Issues for DiffDocument19 pagesSoft-started Induction Motor Modeling and Heating Issues for DiffJunior ARAGÃONo ratings yet
- Lab Report: Engineering Analysis and Design (EEN 206)Document6 pagesLab Report: Engineering Analysis and Design (EEN 206)saksham mahajanNo ratings yet
- Torque-Slip Characteristics of Induction Motors ExplainedDocument17 pagesTorque-Slip Characteristics of Induction Motors Explainedvoltax1No ratings yet
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocument11 pagesThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونNo ratings yet
- EM2 - Lab - 10 - Synchronous Motor Part I - STD PDFDocument7 pagesEM2 - Lab - 10 - Synchronous Motor Part I - STD PDFneonNo ratings yet
- Non Linear System For DC MotorDocument6 pagesNon Linear System For DC MotorAhmad RahanNo ratings yet
- 3 Phase Motor Starters DDocument15 pages3 Phase Motor Starters DManishmanniaNo ratings yet
- EEP305 Electric Drives Laboratory PDFDocument14 pagesEEP305 Electric Drives Laboratory PDFAmit Singh100% (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- School of Electrical Engineering Lab Record: Eee2005 - Digital Signal Processing LabDocument12 pagesSchool of Electrical Engineering Lab Record: Eee2005 - Digital Signal Processing LabAditi DixitNo ratings yet
- NCC JourneyDocument1 pageNCC JourneyAditi DixitNo ratings yet
- Lean Start Up Management: Murali Manohar BDocument13 pagesLean Start Up Management: Murali Manohar BAditi DixitNo ratings yet
- Identifying Business Opportunities from ProblemsDocument6 pagesIdentifying Business Opportunities from ProblemsAditi DixitNo ratings yet
- Activity 2: College of EngineeringDocument3 pagesActivity 2: College of EngineeringMa.Elizabeth HernandezNo ratings yet
- Ch02 PDFDocument12 pagesCh02 PDFRuel Japhet BitoyNo ratings yet
- 11 Main Hydraulic PumpDocument4 pages11 Main Hydraulic PumpZawminhtun100% (1)
- Ref Three EditionDocument9 pagesRef Three EditionDragon DangerNo ratings yet
- 2PX4 Table Staad Report DocumentsDocument23 pages2PX4 Table Staad Report DocumentsEr Prabhanjan ChigareNo ratings yet
- Principles of Sensing: Definition, Classification and Data AcquisitionDocument13 pagesPrinciples of Sensing: Definition, Classification and Data AcquisitionvanithaNo ratings yet
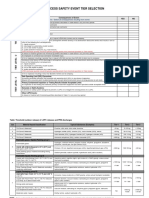
- Process Safety Event Tier SelectionDocument2 pagesProcess Safety Event Tier SelectionsheerazaliNo ratings yet
- Ekip Aircraft (Video) - Ekip Flower Active Specialles - Russian Ufo (7 Photos)Document41 pagesEkip Aircraft (Video) - Ekip Flower Active Specialles - Russian Ufo (7 Photos)flieger horstNo ratings yet
- Compressor Handbook Sec 6 ArielDocument32 pagesCompressor Handbook Sec 6 Arielfrana hadiNo ratings yet
- MANIYT0620A161-BK - Air Cooled Ice Cuber 115V-60HZ-1PHDocument2 pagesMANIYT0620A161-BK - Air Cooled Ice Cuber 115V-60HZ-1PHPortillo Calix Jorge LuisNo ratings yet
- Packaged Drinking WaterDocument8 pagesPackaged Drinking WaterArit DeyNo ratings yet
- Brochure A3Document2 pagesBrochure A3Arjun ReddyNo ratings yet
- 80-98ME ME-C Engines MaintenaceDocument9 pages80-98ME ME-C Engines MaintenaceLeonid KolesnikovNo ratings yet
- No - Ntnu Inspera 2379720Document102 pagesNo - Ntnu Inspera 2379720Petruta OloguNo ratings yet
- Cu Xlpe LSZH TCWB or GSWB LSZH 0,6 1 KVDocument2 pagesCu Xlpe LSZH TCWB or GSWB LSZH 0,6 1 KVsrik11No ratings yet
- Growatt MIN 2500-6000TL-X CE LVDDocument2 pagesGrowatt MIN 2500-6000TL-X CE LVDpatchqvjkNo ratings yet
- Product Detail - 700d - English - 2Document2 pagesProduct Detail - 700d - English - 2Athan TheaNo ratings yet
- CSEC Physics P2 2015 JanuaryDocument21 pagesCSEC Physics P2 2015 JanuaryBill BobNo ratings yet
- Sonnax GM 6T40, 6T45, 6T50 Series Identification GuideDocument4 pagesSonnax GM 6T40, 6T45, 6T50 Series Identification GuideAlex DumasNo ratings yet
- Everything You Need to Know About Drying Methods and ProcessesDocument76 pagesEverything You Need to Know About Drying Methods and ProcessesBambang NurhadiNo ratings yet
- Standard Specification 9-11-3 External High Temperature Insulation and WeathershieldingDocument14 pagesStandard Specification 9-11-3 External High Temperature Insulation and WeathershieldingNavidNikdelNo ratings yet
- Synchronous Machine Testing With ALL-TEST InstrumentDocument7 pagesSynchronous Machine Testing With ALL-TEST InstrumentENRIQUENo ratings yet
- TOM MicroprojectDocument18 pagesTOM MicroprojectAkshay Khangre100% (1)
- Lecture 1 Choke PerformanceDocument45 pagesLecture 1 Choke PerformancearvNo ratings yet
- User Manual: Elevator Door ControllerDocument18 pagesUser Manual: Elevator Door Controllerzaki zakiNo ratings yet
- ECCN EAR 99 Design Class Detail for Pressure VesselsDocument4 pagesECCN EAR 99 Design Class Detail for Pressure VesselsIgnatios StaboulisNo ratings yet
- 6.6kV SWBD BOQ - Reference OnlyDocument1 page6.6kV SWBD BOQ - Reference OnlyNavaneetha KrishnanNo ratings yet
- 3/2 and 4/2 Directional Poppet Valve, With Solenoid Operation, For Water Emulsions and WaterDocument16 pages3/2 and 4/2 Directional Poppet Valve, With Solenoid Operation, For Water Emulsions and WaterMichail ArmitageNo ratings yet
- Syska Led Price List RLP Jan 23Document4 pagesSyska Led Price List RLP Jan 23e98210659fe209100% (1)
- Q400.amm (76) .Amm05 11 00 992 802Document11 pagesQ400.amm (76) .Amm05 11 00 992 802Naresh Kumar5No ratings yet