You might also like
- Electronic Control of Switched Reluctance MachinesFrom EverandElectronic Control of Switched Reluctance MachinesRating: 5 out of 5 stars5/5 (5)
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)
- Aakashdeep Shome - Experiment 1 - Lab HI-XDocument37 pagesAakashdeep Shome - Experiment 1 - Lab HI-XAakashdeep ShomeNo ratings yet
- Limit Switches: (3SE3100 & 3SE3120 SERIES)Document2 pagesLimit Switches: (3SE3100 & 3SE3120 SERIES)ThilinaNo ratings yet
- Design of Stub Axle and Static+dynamic Analysis On Solid Works With Calculations For Shell Eco Marathon Competition.Document5 pagesDesign of Stub Axle and Static+dynamic Analysis On Solid Works With Calculations For Shell Eco Marathon Competition.Hammad SajjadNo ratings yet
- Portal 2Document46 pagesPortal 2yusufNo ratings yet
- DBM 2000 XS, DBM 2000 EV and DBM 2500 EV: Engine Removal FromDocument28 pagesDBM 2000 XS, DBM 2000 EV and DBM 2500 EV: Engine Removal FromNicoleta CosteaNo ratings yet
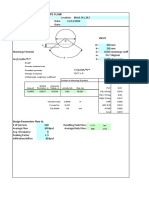
- Member Name: C2: 1. General InformationDocument6 pagesMember Name: C2: 1. General InformationJefferd PaetNo ratings yet
- DBM Gmec (Ing) MerloDocument87 pagesDBM Gmec (Ing) MerloNicoleta Costea83% (6)
- Beam-Column Moment ConnectionDocument10 pagesBeam-Column Moment Connectionrammohan100% (3)
- Pos. 3.2.1.01 Hydraulic Drive Unit (240V) : 3.2.1 Torque ToolsDocument10 pagesPos. 3.2.1.01 Hydraulic Drive Unit (240V) : 3.2.1 Torque ToolsFaraz ElectronicNo ratings yet
- DBM2000 XS - DBM2000 EV DBM2500 EV - DBM3500 EV: Removal of Both Loader and Drum FromDocument33 pagesDBM2000 XS - DBM2000 EV DBM2500 EV - DBM3500 EV: Removal of Both Loader and Drum FromNicoleta CosteaNo ratings yet
- 2FC1Document4 pages2FC1Jefferd PaetNo ratings yet
- Mech 343 Lab 2 ReportDocument16 pagesMech 343 Lab 2 ReportYousef MeguidNo ratings yet
- Beam3 PortalDocument21 pagesBeam3 PortalvnkatNo ratings yet
- Tepo Sole Co., LTD: 1. General InformationDocument3 pagesTepo Sole Co., LTD: 1. General InformationAlpha ScimathNo ratings yet
- Rocker Bogie CalculationsDocument13 pagesRocker Bogie Calculationsravi100% (2)
- Continuous Beam AnalysisDocument20 pagesContinuous Beam AnalysisvnkatNo ratings yet
- Lateral Forces by Kinematic Overstrength: I Iacum I, K I, K I, KDocument1 pageLateral Forces by Kinematic Overstrength: I Iacum I, K I, K I, KHúber OspinaNo ratings yet
- Design and Analysis of Isolated Footings: Project InformationDocument5 pagesDesign and Analysis of Isolated Footings: Project InformationMark Gregory RimandoNo ratings yet
- Post TensionDocument8 pagesPost Tensionedc1312No ratings yet
- Insert Plates Splice Bolt CalculationDocument1 pageInsert Plates Splice Bolt Calculationsmileya_vpNo ratings yet
- Lab ManualDocument9 pagesLab ManualMohit SinhaNo ratings yet
- Individual Submission - 14338026Document7 pagesIndividual Submission - 14338026ulageswaran.kishokumarNo ratings yet
- A Theoretical and Numerical Evaluation On The Ductility of Reinforced Concrete Flexural Members Due To The Effects of Varying Structural ParametersDocument16 pagesA Theoretical and Numerical Evaluation On The Ductility of Reinforced Concrete Flexural Members Due To The Effects of Varying Structural ParametersWai FaiNo ratings yet
- Structural Analysis For Two Story Residential BuildingDocument4 pagesStructural Analysis For Two Story Residential BuildingMathan LuceroNo ratings yet
- MJB 20 Pile CapDocument24 pagesMJB 20 Pile CapRaoNo ratings yet
- Informe - Diseño de EjeDocument12 pagesInforme - Diseño de EjeCristian ArizaNo ratings yet
- ScratchDocument1 pageScratchesi ekmiNo ratings yet
- ADAPT TN294 RC DFLTN Crack Ex 12Document7 pagesADAPT TN294 RC DFLTN Crack Ex 12CarsonBakerNo ratings yet
- Beam 3Document20 pagesBeam 3MARIO MARCELONo ratings yet
- Beam 3Document20 pagesBeam 3MARIO MARCELONo ratings yet
- Design of Inner Long. Girder (Lg2) : Section PropertiesDocument49 pagesDesign of Inner Long. Girder (Lg2) : Section Propertiesrabindra choudharyNo ratings yet
- Live Load Distribution Factor CalculationsDocument5 pagesLive Load Distribution Factor CalculationsBunkun15No ratings yet
- Appendix 4 ADocument1 pageAppendix 4 ARammiris ManNo ratings yet
- Experiment 04: Behaviour of Reinforced Concrete Beams Under TorsionDocument10 pagesExperiment 04: Behaviour of Reinforced Concrete Beams Under TorsionKhimavathBharathNaikNo ratings yet
- Linde Service GuideDocument7 pagesLinde Service GuideMário AndradeNo ratings yet
- 1st Order Analysis I: Design DataDocument20 pages1st Order Analysis I: Design DataFilip WrzosekNo ratings yet
- Paper 3-1Document35 pagesPaper 3-1Wai FaiNo ratings yet
- GF - SST 62M NL - 02 Februari 2021 - Rev01Document151 pagesGF - SST 62M NL - 02 Februari 2021 - Rev01galang setiawanNo ratings yet
- TABLE: Concrete Design 2 - Beam Summary Data - ACI 318-14Document6 pagesTABLE: Concrete Design 2 - Beam Summary Data - ACI 318-14muhamad rizqiNo ratings yet
- Vibration Damper and Pulley - Remove - Pulleys Without Split Lock Rings (KENR6081-15)Document2 pagesVibration Damper and Pulley - Remove - Pulleys Without Split Lock Rings (KENR6081-15)Anderson Oliveira SilvaNo ratings yet
- Bolt TighteningDocument6 pagesBolt TighteningahmedbeaetNo ratings yet
- Diseño de ColumnasDocument4 pagesDiseño de ColumnasLuiz Fernando Alarcon RojasNo ratings yet
- Calculation of Service Life: Load DataDocument4 pagesCalculation of Service Life: Load Datarafael rodarteNo ratings yet
- Steel Assignment CheckedDocument20 pagesSteel Assignment CheckedFilip WrzosekNo ratings yet
- Design of T-Beam BridgeDocument39 pagesDesign of T-Beam BridgePanha PorNo ratings yet
- Akn Series: Metal Bellows CouplingDocument1 pageAkn Series: Metal Bellows CouplingSueli ZaniNo ratings yet
- Section ModulusDocument2 pagesSection ModulusSachin KumarNo ratings yet
- X27 Stepper Motor Specification: 1.1 Summary of FeaturesDocument20 pagesX27 Stepper Motor Specification: 1.1 Summary of FeaturesBogdan TabasNo ratings yet
- Lorenz Messtechnik GM BH: USB - Torque Sensor With Configuration and Evaluation Software DR-3000Document4 pagesLorenz Messtechnik GM BH: USB - Torque Sensor With Configuration and Evaluation Software DR-3000Alejandro AndreuNo ratings yet
- Girder Stressing CalculationsDocument11 pagesGirder Stressing CalculationsSarmad WaqasNo ratings yet
- Analysis1: MeshDocument10 pagesAnalysis1: MeshnirmalNo ratings yet
- Arpa Dec 2008Document23 pagesArpa Dec 2008jzuckertNo ratings yet
- Bending Stress in A Beam PDF FreeDocument11 pagesBending Stress in A Beam PDF FreeGTRCDENo ratings yet
- Bending Stress in A BeamDocument11 pagesBending Stress in A BeamFarrukh75% (8)
- Beam B9 ResultsDocument3 pagesBeam B9 ResultsVinh DuongNo ratings yet
- Gas Dynamics SolverDocument16 pagesGas Dynamics SolverVicki PhilpotNo ratings yet
- Injector Adjustment SIS 2.0Document11 pagesInjector Adjustment SIS 2.0isaac989No ratings yet
- Point Sheave - 1Document2 pagesPoint Sheave - 1Gilney FreitasNo ratings yet
- Summary of A Conceptual Design of Low Fouling and High Recovery FO-MSF-DESKTOP-47LO0PODocument1 pageSummary of A Conceptual Design of Low Fouling and High Recovery FO-MSF-DESKTOP-47LO0POFaisal MumtazNo ratings yet
- Optimisation of The WWTP Performance MakiniaDocument39 pagesOptimisation of The WWTP Performance MakiniaFaisal MumtazNo ratings yet
- Wer 1408Document7 pagesWer 1408Faisal MumtazNo ratings yet
- EENG703 - Assignment04 (AutoRecovered)Document19 pagesEENG703 - Assignment04 (AutoRecovered)Faisal MumtazNo ratings yet
- Hydraulic SizingDocument2 pagesHydraulic SizingFaisal MumtazNo ratings yet
- IWTP8-MFQ-ILF-21-0500-Mechanical Equipment List 23-p2mDocument10 pagesIWTP8-MFQ-ILF-21-0500-Mechanical Equipment List 23-p2mFaisal MumtazNo ratings yet
- Summary of Development of A Steady-State Mathematical Model For MEE-TVCDocument2 pagesSummary of Development of A Steady-State Mathematical Model For MEE-TVCFaisal MumtazNo ratings yet
- ExergyDocument10 pagesExergyFaisal MumtazNo ratings yet
- Mass and Energy Balances of Sludge Processing in Reference and Upgraded Waste Water Treatment PlantsDocument14 pagesMass and Energy Balances of Sludge Processing in Reference and Upgraded Waste Water Treatment Plantsmohit guptaNo ratings yet
- WWSewerDesign (EDocFind - Com) - 1Document10 pagesWWSewerDesign (EDocFind - Com) - 1Saw ThreedNo ratings yet
- Sizing PoleniDocument87 pagesSizing PoleniFaisal MumtazNo ratings yet
- Calculation of Water Flow Rates For Different Pipe Sizes - US UnitsDocument4 pagesCalculation of Water Flow Rates For Different Pipe Sizes - US UnitsRyan KaneNo ratings yet
- BQTS - WetWellCalcDocument3 pagesBQTS - WetWellCalcFaisal MumtazNo ratings yet
- Friction FactorDocument6 pagesFriction Factorrajeshsapkota123No ratings yet
- Mannings MetricDocument1 pageMannings MetricFaisal MumtazNo ratings yet
- Notes 3: Mass TransportDocument60 pagesNotes 3: Mass TransportFaisal MumtazNo ratings yet
- Summary of Vector and Tensor NotationDocument41 pagesSummary of Vector and Tensor NotationFaisal MumtazNo ratings yet
- 05 - Design of Package RCTRDocument1 page05 - Design of Package RCTRFaisal MumtazNo ratings yet
- Assignment 1Document3 pagesAssignment 1Faisal MumtazNo ratings yet
- 02 - Case Study - Industrial Technical QueryDocument3 pages02 - Case Study - Industrial Technical QueryFaisal MumtazNo ratings yet
- 00 - WWT EngineeringDocument188 pages00 - WWT EngineeringFaisal MumtazNo ratings yet
- 06 - STP Energy Balance (Power Consumption Calcs)Document7 pages06 - STP Energy Balance (Power Consumption Calcs)Faisal MumtazNo ratings yet
- 01 - Mass & Energy Balance WWT (CHP3)Document56 pages01 - Mass & Energy Balance WWT (CHP3)Faisal MumtazNo ratings yet
- A Study On Thermo - Catalytic Degradation of PET (Polyethylene Terephthalate) Waste For Fuel Production and Chemical ProductsDocument6 pagesA Study On Thermo - Catalytic Degradation of PET (Polyethylene Terephthalate) Waste For Fuel Production and Chemical ProductsFaisal MumtazNo ratings yet
- PDF Created With Pdffactory Trial VersionDocument1 pagePDF Created With Pdffactory Trial VersionFaisal MumtazNo ratings yet
- Isoconversional Methods - Fundamentals, Meaning and ApplicationDocument11 pagesIsoconversional Methods - Fundamentals, Meaning and ApplicationFaisal MumtazNo ratings yet
- Experimental Study of Thermal and Catalytic Pyrolysis of Plastic Waste ComponentsDocument11 pagesExperimental Study of Thermal and Catalytic Pyrolysis of Plastic Waste ComponentsFaisal MumtazNo ratings yet
- RSC Advances: PaperDocument14 pagesRSC Advances: PaperFaisal MumtazNo ratings yet
- Pyrolysis of Polypropylene Waste With Natural Zeolite As CatalystDocument10 pagesPyrolysis of Polypropylene Waste With Natural Zeolite As CatalystFaisal MumtazNo ratings yet
- PDF Created With Pdffactory Trial VersionDocument1 pagePDF Created With Pdffactory Trial VersionFaisal MumtazNo ratings yet
- Lighting ModuleDocument133 pagesLighting ModulePrashanth KochuveetilNo ratings yet
- Cie - 462 - Test One.09.05.2022Document2 pagesCie - 462 - Test One.09.05.2022Chris KapendaNo ratings yet
- On The Monodromies of N 2 Supersymmetric Yang-Mills TheoryDocument15 pagesOn The Monodromies of N 2 Supersymmetric Yang-Mills TheoryspanishramNo ratings yet
- ASCE710E1Document40 pagesASCE710E1Tabish Islam100% (2)
- Review Module 24 Geotechnical Engineering 5 Part 2Document2 pagesReview Module 24 Geotechnical Engineering 5 Part 2John Andre MarianoNo ratings yet
- 8620 Wearable Ring Scanner Data Sheet en PDFDocument2 pages8620 Wearable Ring Scanner Data Sheet en PDFDinesh Kumar DhundeNo ratings yet
- Chemistry of PhosphorusDocument7 pagesChemistry of PhosphorusChandra ReddyNo ratings yet
- Thermal Oil Boiler Vega PDFDocument2 pagesThermal Oil Boiler Vega PDFrafiradityaNo ratings yet
- Fluid Mechanics Unit1Document100 pagesFluid Mechanics Unit1anjuNo ratings yet
- DC 53 CatalogDocument4 pagesDC 53 CatalogHonza MičkaNo ratings yet
- Price Schedule Wapcos Limited Quoting Sheet For The Bidder: Description of Work Unit QuantityDocument2 pagesPrice Schedule Wapcos Limited Quoting Sheet For The Bidder: Description of Work Unit QuantityBidyut Senapati - WAPCOSNo ratings yet
- SETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesDocument74 pagesSETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesSonu Singh100% (4)
- Trial Mix Design Report PDFDocument38 pagesTrial Mix Design Report PDFTimothy HughesNo ratings yet
- Unit Plan M7 S.Y. 2020 2021Document14 pagesUnit Plan M7 S.Y. 2020 2021dan teNo ratings yet
- Adelpia TGL2260ADocument55 pagesAdelpia TGL2260ApasmanteriabellaNo ratings yet
- Chemistry Form 4 A NotesDocument67 pagesChemistry Form 4 A NotesJia En TanNo ratings yet
- RosemountDocument24 pagesRosemountVirgilio VillonNo ratings yet
- Tugas Metalurgi LasDocument16 pagesTugas Metalurgi LasMizan100% (2)
- Identification of Textile Fiber by Raman MicrospecDocument9 pagesIdentification of Textile Fiber by Raman MicrospecTesfayWaseeNo ratings yet
- EPRI Cycle Chemistry Upsets During OperationDocument42 pagesEPRI Cycle Chemistry Upsets During OperationTrầnĐạtNo ratings yet
- Thermal Calculation of Heat Exchangers With Simplified Consideration of Axial Wall Heat ConductionDocument7 pagesThermal Calculation of Heat Exchangers With Simplified Consideration of Axial Wall Heat ConductionA.M.P.P. GUNARATHNANo ratings yet
- Microfluidics Fluid Physics at The Nanoliter Scale PDFDocument50 pagesMicrofluidics Fluid Physics at The Nanoliter Scale PDFDavid CoralNo ratings yet
- Filetype PDF Photoconduction SemiconductorDocument2 pagesFiletype PDF Photoconduction SemiconductorGregNo ratings yet
- 1990 - A New Approach To Highefficiency Multibandgap Solar Cells PDFDocument5 pages1990 - A New Approach To Highefficiency Multibandgap Solar Cells PDFdarleydomingosNo ratings yet
- Hardness Test BlocksDocument2 pagesHardness Test BlocksAvijit DebnathNo ratings yet
- Unit I - Force Analysis (9) : Systems and Tribology ConceptDocument82 pagesUnit I - Force Analysis (9) : Systems and Tribology ConceptSaranNo ratings yet
- K-Flex English-Catalog-2019 (Ic Clad)Document4 pagesK-Flex English-Catalog-2019 (Ic Clad)ashishvaidNo ratings yet
- SilverThin Slewing Rings and Pinions CatalogDocument16 pagesSilverThin Slewing Rings and Pinions CatalogGanesh LohakareNo ratings yet
- Energy TestDocument19 pagesEnergy TestDataNo ratings yet
- A Comparison of Liquid Petroleum Meters For Custody Transfer MeasurementDocument12 pagesA Comparison of Liquid Petroleum Meters For Custody Transfer MeasurementAmr Guenena100% (2)