You might also like
- MPPTDocument8 pagesMPPTNo NameNo ratings yet
- Ijert Ijert: Implementation of Buck-Boost Converter For Remote Area Lighting SystemDocument4 pagesIjert Ijert: Implementation of Buck-Boost Converter For Remote Area Lighting SystemSingam SridharNo ratings yet
- Islanded Microgrid BenchmarkDocument7 pagesIslanded Microgrid BenchmarkDinithi LaknaNo ratings yet
- CUK-SEPIC Hybrid ConverterDocument9 pagesCUK-SEPIC Hybrid ConverterIJRASETPublicationsNo ratings yet
- Design and Simulation of Solar PV SystemDocument6 pagesDesign and Simulation of Solar PV SystemIndraneel ChapalaNo ratings yet
- Materials Today: Proceedings: Suchismita Roy, Pradeep Kumar Sahu, Satyaranjan Jena, Anuja Kumar AcharyaDocument10 pagesMaterials Today: Proceedings: Suchismita Roy, Pradeep Kumar Sahu, Satyaranjan Jena, Anuja Kumar AcharyaTheuns DuvenhageNo ratings yet
- A Grid Interface Current Control Strategy For DC MicrogridsDocument8 pagesA Grid Interface Current Control Strategy For DC MicrogridsPradeep Kumar SahuNo ratings yet
- Project: Solar Powered Induction Motor DriveDocument75 pagesProject: Solar Powered Induction Motor DriveDebanjan ChatterjeeNo ratings yet
- Power Converters, Control, and Energy Management For Distributed GenerationDocument5 pagesPower Converters, Control, and Energy Management For Distributed GenerationAbdelaziz IsmealNo ratings yet
- Publishedpaper February2014 1114eeiej03Document15 pagesPublishedpaper February2014 1114eeiej03S KhatibNo ratings yet
- 14sepicconferencepaper PDFDocument6 pages14sepicconferencepaper PDFSherrinNo ratings yet
- Regulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationDocument11 pagesRegulated Output Voltage Double Switch Buck-Boost Converter For Photovoltaic Energy ApplicationEduardo Cairolli de NovaesNo ratings yet
- Design and Performance Analysis of An On-Grid Photovoltaic Power System Under Iraqi Solar CircumstancesDocument13 pagesDesign and Performance Analysis of An On-Grid Photovoltaic Power System Under Iraqi Solar CircumstancesAgung Bagus SajiwoNo ratings yet
- Effect of Partial Shading in Grid Connected Solar PV System With FL ControllerDocument10 pagesEffect of Partial Shading in Grid Connected Solar PV System With FL ControllerPtuan ThanhNo ratings yet
- 8th Batch Project PresentatioDocument30 pages8th Batch Project PresentatioThulasi PrasadNo ratings yet
- Grid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesDocument12 pagesGrid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesIJRASETPublicationsNo ratings yet
- A10020115 KTI AJER InternasionalDocument15 pagesA10020115 KTI AJER Internasionalarief ndartoNo ratings yet
- 1499-Article Text-2805-1-10-20210320Document7 pages1499-Article Text-2805-1-10-20210320hammad aslamNo ratings yet
- 38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarDocument10 pages38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarTJPRC PublicationsNo ratings yet
- Wevj 15 00048Document39 pagesWevj 15 00048jesusNo ratings yet
- Nandha Final DocumentDocument33 pagesNandha Final DocumentAravind PhoenixNo ratings yet
- Analysis and Implement of Hybrid ANN PandO Based MPPT Controller To Enhance Efficiency of Photovoltaic SystemDocument12 pagesAnalysis and Implement of Hybrid ANN PandO Based MPPT Controller To Enhance Efficiency of Photovoltaic SystemEditor IJTSRDNo ratings yet
- Design and Implementation of Three Phase Solar PV Integrated UPQC Based On Artificial Neural NetworksDocument7 pagesDesign and Implementation of Three Phase Solar PV Integrated UPQC Based On Artificial Neural NetworksIJRASETPublicationsNo ratings yet
- Investigation of PV BalancersDocument6 pagesInvestigation of PV BalancersUday Kiran DokalaNo ratings yet
- Development of Solar DC Home System Using Modified LUO ConverterDocument8 pagesDevelopment of Solar DC Home System Using Modified LUO ConverterJanani RajavelNo ratings yet
- The Role of Power Electronics in Renewable Energy Systems Research and DevelopmentDocument5 pagesThe Role of Power Electronics in Renewable Energy Systems Research and DevelopmentNaga Surya PrakashNo ratings yet
- Performance Evaluation of On-Grid and Off-Grid Solar Photovoltaic SystemsDocument5 pagesPerformance Evaluation of On-Grid and Off-Grid Solar Photovoltaic SystemsSojol KumarNo ratings yet
- An Improved DC-DC Boost Converter For Energy HarveDocument10 pagesAn Improved DC-DC Boost Converter For Energy HarveTuấn Nguyễn VănNo ratings yet
- Simulation and Implementation of Incremental Conductance Method by Using Cuk ConverterDocument6 pagesSimulation and Implementation of Incremental Conductance Method by Using Cuk ConverterSachin jadhavNo ratings yet
- To Study, Analyse and Implement MPPT PandO Based Photovoltaic PV System Using PID ControllerDocument4 pagesTo Study, Analyse and Implement MPPT PandO Based Photovoltaic PV System Using PID ControllerEditor IJTSRDNo ratings yet
- Interleaved Luo Report 2Document51 pagesInterleaved Luo Report 2VijayNo ratings yet
- Modified Common Ground Transformerless High Gain Dc-DcBuck-Boost ConverterDocument11 pagesModified Common Ground Transformerless High Gain Dc-DcBuck-Boost ConverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Charge ControllerDocument7 pagesCharge ControllerJose Gabriel Villalobos Alvarado.No ratings yet
- Project SynopsisDocument13 pagesProject SynopsisKarthik SDNo ratings yet
- ProjectDocument34 pagesProjectThulasi PrasadNo ratings yet
- Publishedpaper February2014 1114eeiej03Document15 pagesPublishedpaper February2014 1114eeiej03Ahmed.AhmedNo ratings yet
- Design and Implementation of Three Phase To Single Phase Solid State TransformerDocument37 pagesDesign and Implementation of Three Phase To Single Phase Solid State TransformerUsha SreeNo ratings yet
- 4 Paper ICITACE 2014Document6 pages4 Paper ICITACE 2014Rahmatul HafizahNo ratings yet
- A Hybrid ACDC Microgrid and ItsDocument9 pagesA Hybrid ACDC Microgrid and ItsSivareddy MudiyalaNo ratings yet
- 080Document6 pages080enmnabilNo ratings yet
- GS381ijatesDocument9 pagesGS381ijatesSHARJEEL MUNAWARNo ratings yet
- 08442403Document5 pages08442403Petrescu VasyNo ratings yet
- Open-Circuit Switch-Fault Tolerant Control of A Modified Boost DC-DC Converter For Alternative Energy SystemsDocument10 pagesOpen-Circuit Switch-Fault Tolerant Control of A Modified Boost DC-DC Converter For Alternative Energy Systemsjeos20132013No ratings yet
- Design and Performance Analysis of An On-Grid Photovoltaic Power System Under Iraqi Solar CircumstancesDocument12 pagesDesign and Performance Analysis of An On-Grid Photovoltaic Power System Under Iraqi Solar Circumstancesسعيد ابوسريعNo ratings yet
- 2608-Article Text-5748-1-10-20201215Document13 pages2608-Article Text-5748-1-10-20201215بشرى جودةNo ratings yet
- Simulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationsDocument10 pagesSimulation and Experimental Analysis of Hybrid DC-DC Converter For Electric Vehicle ApplicationspremsonyNo ratings yet
- Enhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsDocument10 pagesEnhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsEditor IJTSRDNo ratings yet
- A Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeDocument9 pagesA Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeTANVIR MAHMUD MAHIMNo ratings yet
- A Small Grid-Connected PV System Controlled by The PLCDocument2 pagesA Small Grid-Connected PV System Controlled by The PLCtongaiNo ratings yet
- IJIRTSV3I2038Document5 pagesIJIRTSV3I2038Tom LoveuNo ratings yet
- Electronics 11 02074 v2Document18 pagesElectronics 11 02074 v2ManuelNo ratings yet
- A Hybrid AC DC Microgrid and Its Coordination ControlDocument9 pagesA Hybrid AC DC Microgrid and Its Coordination ControlMR. ARITRA PATRANo ratings yet
- Irjet V8i4762Document9 pagesIrjet V8i4762akashsuresh16780No ratings yet
- Power Control of DC Microgrid With Variable Generation and Energy StorageDocument5 pagesPower Control of DC Microgrid With Variable Generation and Energy StorageSEP-PublisherNo ratings yet
- IET Power Electronics - 2021 - Varma P C - Grid Integrated Solar Energy Transfer System With A Two Layer ComplexDocument18 pagesIET Power Electronics - 2021 - Varma P C - Grid Integrated Solar Energy Transfer System With A Two Layer ComplexMuhammad Kamran MustafaNo ratings yet
- Application of PI and MPPT Controller To DC-DC ConDocument9 pagesApplication of PI and MPPT Controller To DC-DC ConwafaNo ratings yet
- The Design and Analysis of Large Solar PV FarmDocument10 pagesThe Design and Analysis of Large Solar PV FarmNiamatasifNo ratings yet
- Design and Performance Analysis of A Photovoltaic WaterDocument8 pagesDesign and Performance Analysis of A Photovoltaic WaterPrakash Kumar RayNo ratings yet
- Description: V / S - r250dDocument4 pagesDescription: V / S - r250dAli OsmanNo ratings yet
- Paper 20230906104745Document96 pagesPaper 20230906104745afifkadriNo ratings yet
- English 10: Determining The Effect of Textual AidsDocument21 pagesEnglish 10: Determining The Effect of Textual AidsMarc Aj CornetaNo ratings yet
- SAU DescriptionDocument11 pagesSAU DescriptionИнга ТурчановаNo ratings yet
- Why Choose A Sale CareerDocument14 pagesWhy Choose A Sale CareerMulong CabrillasNo ratings yet
- CBO9780511530159A007Document3 pagesCBO9780511530159A007Ali AzariunNo ratings yet
- Module # 14 - Learning Activity 1Document3 pagesModule # 14 - Learning Activity 1Kyla MiguelNo ratings yet
- 03Document34 pages03Gagan JainNo ratings yet
- Research and Writing For Undergraduates: What You Need To Know For Survival and SuccessDocument46 pagesResearch and Writing For Undergraduates: What You Need To Know For Survival and SuccessAlynsa ErynNo ratings yet
- Mi CepDocument9 pagesMi CepSaad khanNo ratings yet
- Grade 7 CBC Business Studies Schemes of Work Term 1Document14 pagesGrade 7 CBC Business Studies Schemes of Work Term 1GEOFRY KIRUINo ratings yet
- Prejudice Towards Sex Workers Depends On The Sexual Activity and Autonomy of Their Work, Hobbies and Daily ActivitiesDocument18 pagesPrejudice Towards Sex Workers Depends On The Sexual Activity and Autonomy of Their Work, Hobbies and Daily ActivitiessergiforteasanchezNo ratings yet
- The Female Autism Phenotype and Camouflaging - A Narrative ReviewDocument12 pagesThe Female Autism Phenotype and Camouflaging - A Narrative ReviewjoannadepaoliNo ratings yet
- Math10 q2 Mod2 Solvingproblemsinvolvingpolynomialfunctions v5Document31 pagesMath10 q2 Mod2 Solvingproblemsinvolvingpolynomialfunctions v5Mikaela MotolNo ratings yet
- Styrolux 684D SBC Ineos TDS enDocument3 pagesStyrolux 684D SBC Ineos TDS enfabianmendez2875No ratings yet
- Mellpi Pro Form For Pnao (Rnet Use)Document14 pagesMellpi Pro Form For Pnao (Rnet Use)AENA MONNo ratings yet
- Review of Past LessonDocument30 pagesReview of Past LessonDiana Ross Dayrit DiazNo ratings yet
- SSRN Id4377891Document35 pagesSSRN Id4377891MUHAMMAD SAFWAN AHMAD MUSLIMNo ratings yet
- ICP-OES - ICP Chemistry, ICP-OES Analysis, Strengths and LimitationsDocument11 pagesICP-OES - ICP Chemistry, ICP-OES Analysis, Strengths and LimitationsMuhammad NadeemNo ratings yet
- Rogue Trader - Necron Character GuideDocument64 pagesRogue Trader - Necron Character GuideTom Johnson100% (2)
- Value Chain of Fish Langano 2019Document11 pagesValue Chain of Fish Langano 2019Addis HailuNo ratings yet
- Sports PsychologyDocument26 pagesSports PsychologyHabiya TauseefNo ratings yet
- Ethics Part2 - BBColl2021Document26 pagesEthics Part2 - BBColl2021Michael MatshonaNo ratings yet
- Silhouttes-Of-chemistry by Trifonov and VlasovDocument299 pagesSilhouttes-Of-chemistry by Trifonov and Vlasovidkwhii50% (2)
- Physics Full Book TestDocument3 pagesPhysics Full Book TestLearnEnglish WithAriNo ratings yet
- Intelligence Test 05Document7 pagesIntelligence Test 05Saadat KhanNo ratings yet
- KPK SST PD PDFDocument1 pageKPK SST PD PDFArshad AliNo ratings yet
- Irrigation Engineering 2015 2019Document12 pagesIrrigation Engineering 2015 2019SIDDHARTHA MAITYNo ratings yet
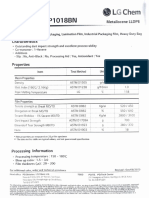
- Metaloceno Leucene HP1018BNDocument1 pageMetaloceno Leucene HP1018BNAngel Ramás Saint SeiyaNo ratings yet
- Intraindividual Comparison of Aspherical and Spherical Intraocular Lenses of Same Material and PlatformDocument6 pagesIntraindividual Comparison of Aspherical and Spherical Intraocular Lenses of Same Material and PlatformAkhilesh KumarNo ratings yet
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (3)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (229)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (3)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsFrom EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNo ratings yet
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesFrom EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesNo ratings yet
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneFrom EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneNo ratings yet
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideFrom EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNo ratings yet
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFFrom EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNo ratings yet
- The User's Directory of Computer NetworksFrom EverandThe User's Directory of Computer NetworksTracy LaqueyNo ratings yet
- A Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeFrom EverandA Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeNo ratings yet