You might also like
- THM07 Module 2 The Tourist Market and SegmentationDocument14 pagesTHM07 Module 2 The Tourist Market and Segmentationjennifer mirandaNo ratings yet
- DIN EN 12516-2: January 2015Document103 pagesDIN EN 12516-2: January 2015ReytingNo ratings yet
- 413 14 Speakout Upper Intermediate 2nd Tests With Key and ScriptDocument158 pages413 14 Speakout Upper Intermediate 2nd Tests With Key and ScriptHal100% (2)
- Lisjak 2014 EurockDocument7 pagesLisjak 2014 Eurockaxel.tokoNo ratings yet
- Explicit Mean-Field Radius For Nearly Parallel Vortex Filaments in Statistical Equilibrium With Applications To Deep Ocean ConvectionDocument15 pagesExplicit Mean-Field Radius For Nearly Parallel Vortex Filaments in Statistical Equilibrium With Applications To Deep Ocean ConvectionVing666789No ratings yet
- Non-Equilibrium Relation Between Mobility and Diffusivity of Interacting Brownian Particles Under ShearDocument15 pagesNon-Equilibrium Relation Between Mobility and Diffusivity of Interacting Brownian Particles Under ShearFernando MayorgaNo ratings yet
- Describing Dzyaloshinskii-Moriya Spirals From First PrinciplesDocument6 pagesDescribing Dzyaloshinskii-Moriya Spirals From First PrinciplespabitraNo ratings yet
- A Ne W Boundary Model For Simulating Complex and Flexible Wall Bounded Domain in Dissipative Particle DynamicsDocument13 pagesA Ne W Boundary Model For Simulating Complex and Flexible Wall Bounded Domain in Dissipative Particle DynamicsLuis Alberto FuentesNo ratings yet
- Microseismic Monitoring: Insights From Moment Tensor InversionDocument20 pagesMicroseismic Monitoring: Insights From Moment Tensor InversionResolita Juliani SamosirNo ratings yet
- 2000 On The Origin and Bifurcations of Stick-Slip - DankowiczDocument23 pages2000 On The Origin and Bifurcations of Stick-Slip - DankowiczFabian GarciaNo ratings yet
- FEM Theory AnswersDocument45 pagesFEM Theory Answerskhushendrafule14No ratings yet
- Electricity and MagnetismDocument16 pagesElectricity and Magnetismdebasishmee5808No ratings yet
- Limits of Applicability of The Finite Element Explicit Joint Model in TheDocument10 pagesLimits of Applicability of The Finite Element Explicit Joint Model in TheMavelas ToleNo ratings yet
- Brownian Dynamics HandbookDocument14 pagesBrownian Dynamics HandbookRizcky TamaranyNo ratings yet
- Olmi 2017 Meas. Sci. Technol. 28 014003Document7 pagesOlmi 2017 Meas. Sci. Technol. 28 014003Jakler NicheleNo ratings yet
- Hard Versus Soft Impact ModelingDocument15 pagesHard Versus Soft Impact Modelingstephane.benardNo ratings yet
- Mechanics of Materials - Stress Transformation Mechanics of Slender Structures - Boston University PDFDocument8 pagesMechanics of Materials - Stress Transformation Mechanics of Slender Structures - Boston University PDFAbid YusufNo ratings yet
- Analysis of Lorentz and Saliency Forces PDFDocument4 pagesAnalysis of Lorentz and Saliency Forces PDFIvan VazdarNo ratings yet
- 3524614horakova Frana CFD Solutions of MHD PDFDocument4 pages3524614horakova Frana CFD Solutions of MHD PDFRehman UllahNo ratings yet
- MoussaDocument13 pagesMoussaLouerrad MoussaNo ratings yet
- 2D Mesh-Free Modeling For Elasto-Plastic Problems in Large Deformation Based On Power Law BehaviorDocument3 pages2D Mesh-Free Modeling For Elasto-Plastic Problems in Large Deformation Based On Power Law Behaviorchafik elkihalNo ratings yet
- Equivalent Theories of Liquid Crystal Dynamics: Fran Cois Gay-Balmaz, Tudor S. Ratiu, Cesare TronciDocument23 pagesEquivalent Theories of Liquid Crystal Dynamics: Fran Cois Gay-Balmaz, Tudor S. Ratiu, Cesare TronciBayer MitrovicNo ratings yet
- Introduction To Finite Elements (Matrix Methods)Document46 pagesIntroduction To Finite Elements (Matrix Methods)Paulo FidelisNo ratings yet
- Lecture 4Document29 pagesLecture 4Virat BhangeNo ratings yet
- 1 s2.0 S0045794905000805 Main PDFDocument10 pages1 s2.0 S0045794905000805 Main PDFCandra ColivinnNo ratings yet
- Materials & Properties: Mechanical Behaviour: C. GarionDocument19 pagesMaterials & Properties: Mechanical Behaviour: C. GarionJosePeterPintoNo ratings yet
- Lecture 4 Basics of Displacement Methods of AnalysisDocument12 pagesLecture 4 Basics of Displacement Methods of AnalysisBruno EmazNo ratings yet
- JSM 2010 Wooram and ReddyDocument14 pagesJSM 2010 Wooram and ReddyWooram KimNo ratings yet
- Theory of Elasticity: Ceng 6501Document53 pagesTheory of Elasticity: Ceng 6501Tekle Germariam100% (1)
- Embedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannDocument22 pagesEmbedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannRubén Darío RodariNo ratings yet
- Lecture Notes - Linear Elasticity TheoryDocument43 pagesLecture Notes - Linear Elasticity Theoryzcapg17No ratings yet
- Quasi 3D Model For Numerical Computations of Screening Currents in REBCO CoilsDocument9 pagesQuasi 3D Model For Numerical Computations of Screening Currents in REBCO CoilsAnirudh NehraNo ratings yet
- Discrete Element Modeling of Rock Deformation, Fracture Network Development and Permeability Evolution Under Hydraulic StimulationDocument9 pagesDiscrete Element Modeling of Rock Deformation, Fracture Network Development and Permeability Evolution Under Hydraulic StimulationKadir Alf GünaydınNo ratings yet
- Consequences of The Dzyaloshinskii-Moriya InteractionDocument33 pagesConsequences of The Dzyaloshinskii-Moriya InteractionjordypigaianeNo ratings yet
- tmpB2BC TMPDocument8 pagestmpB2BC TMPFrontiersNo ratings yet
- 18ECE302T-U2-L12 Stress and Strain - Tensile Stress and Strain, Definition, RelationshipsDocument14 pages18ECE302T-U2-L12 Stress and Strain - Tensile Stress and Strain, Definition, Relationshipsamitava2010No ratings yet
- Discrete Element Modeling For Granular MaterialsDocument13 pagesDiscrete Element Modeling For Granular MaterialsIsimbi ToniNo ratings yet
- Generalized Tensor Function Via The TensDocument39 pagesGeneralized Tensor Function Via The TensЕлена НиколаевскаяNo ratings yet
- ME 462: Introduction To MEMS: Spring 2022Document34 pagesME 462: Introduction To MEMS: Spring 2022eren onatNo ratings yet
- DYNAMICSDocument17 pagesDYNAMICScrc15No ratings yet
- Scaling Laws and Multiscale ManufacturingDocument32 pagesScaling Laws and Multiscale ManufacturingVikas Lakhmani100% (1)
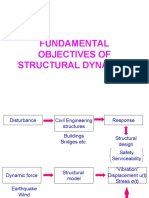
- Fundamental Objectives of Structural DynamicsDocument11 pagesFundamental Objectives of Structural DynamicsikramNo ratings yet
- 1 Influence LineDocument16 pages1 Influence LineasgharNo ratings yet
- Madhukar Vable - Mechanics of Materials (2002)Document36 pagesMadhukar Vable - Mechanics of Materials (2002)Anonymous 0tqzNTWyyNo ratings yet
- Particle DampersDocument17 pagesParticle Dampersmayank YadavNo ratings yet
- Gerst Les Mir T 18 PaperDocument15 pagesGerst Les Mir T 18 PaperTatyGendadeReynosoNo ratings yet
- Cammarata - The Hydro-Mechanically Coupled Response of Rock FracturesDocument21 pagesCammarata - The Hydro-Mechanically Coupled Response of Rock Fracturesecossich123No ratings yet
- An Electrodynamics Solver For Moving Sources: Hallenges and Olver Main ComponentsDocument4 pagesAn Electrodynamics Solver For Moving Sources: Hallenges and Olver Main ComponentsmbobNo ratings yet
- Classic Dynamic Fracture Recovered As The Limit of A Nonlocal Peridynamic Model: The Single Edge Notch in TensionDocument40 pagesClassic Dynamic Fracture Recovered As The Limit of A Nonlocal Peridynamic Model: The Single Edge Notch in TensionGaston GBNo ratings yet
- Engineering Structures: Lawrence VirginDocument8 pagesEngineering Structures: Lawrence VirginClaudia Retamoso LlamasNo ratings yet
- SD Unit 2QBDocument17 pagesSD Unit 2QBmkshiran4No ratings yet
- A Review of Dynamic Balancing For Robotic Mechanisms: Bin Wei and Dan ZhangDocument17 pagesA Review of Dynamic Balancing For Robotic Mechanisms: Bin Wei and Dan ZhangEsteban GutiérrezNo ratings yet
- Statik 123Document69 pagesStatik 1232103011211No ratings yet
- PH Ysicsguide: Introduction To EMTDocument14 pagesPH Ysicsguide: Introduction To EMTRithish BarathNo ratings yet
- amm 638-640 1716Document5 pagesamm 638-640 1716Raymond FuentesNo ratings yet
- The Concept of Local and Non-Local Randomness For Some Mechanical ProblemsDocument18 pagesThe Concept of Local and Non-Local Randomness For Some Mechanical ProblemsGogyNo ratings yet
- 2012 BardocziDocument6 pages2012 BardocziEdwin fNo ratings yet
- I Year Unit 1 CSEDocument55 pagesI Year Unit 1 CSEDumb cutsNo ratings yet
- Decoupling of Arch Action and Truss Action in Deep Beams by Strain EnergyDocument8 pagesDecoupling of Arch Action and Truss Action in Deep Beams by Strain EnergyJet TuapordNo ratings yet
- Lit VM Ijnme01Document34 pagesLit VM Ijnme01Andrés MercadoNo ratings yet
- Advanced Dynamics of Structures 10Document27 pagesAdvanced Dynamics of Structures 10Halil ZeyrekNo ratings yet
- Electricity and Magnetism: Magnetostatics Induction, Vector PotentialDocument6 pagesElectricity and Magnetism: Magnetostatics Induction, Vector PotentialEpic WinNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Introduction To MATLABDocument34 pagesIntroduction To MATLABMuco İboNo ratings yet
- W03-Simulation of Finite SystemsDocument11 pagesW03-Simulation of Finite SystemsMuco İboNo ratings yet
- The Random Walk Model: Middle East Technical University - Department of Metallurgical & Materials EngineeringDocument18 pagesThe Random Walk Model: Middle East Technical University - Department of Metallurgical & Materials EngineeringMuco İboNo ratings yet
- W01-Introduction To Materials Modeling and SimulationDocument30 pagesW01-Introduction To Materials Modeling and SimulationMuco İboNo ratings yet
- W05-Molecular DynamicsDocument19 pagesW05-Molecular DynamicsMuco İboNo ratings yet
- W04 Interatomic PotentialsDocument12 pagesW04 Interatomic PotentialsMuco İboNo ratings yet
- W03-Simulation of Finite SystemsDocument11 pagesW03-Simulation of Finite SystemsMuco İboNo ratings yet
- W06-Monte Carlo MethodDocument12 pagesW06-Monte Carlo MethodMuco İboNo ratings yet
- W09-Finite Element MethodDocument51 pagesW09-Finite Element MethodMuco İboNo ratings yet
- W05-Molecular DynamicsDocument19 pagesW05-Molecular DynamicsMuco İboNo ratings yet
- W07-Monte Carlo Methods at The MesoscaleDocument14 pagesW07-Monte Carlo Methods at The MesoscaleMuco İboNo ratings yet
- A Mechanical Study On Tennis Racquets To Investigate Design Factors That Contribute To Reduced Stress and Improved Vibrational DampeningDocument6 pagesA Mechanical Study On Tennis Racquets To Investigate Design Factors That Contribute To Reduced Stress and Improved Vibrational DampeningMuco İboNo ratings yet
- The Physics of Tennis. III. The Ball-Racket Interaction: 69.166.47.134 On: Fri, 05 Dec 2014 06:38:41Document8 pagesThe Physics of Tennis. III. The Ball-Racket Interaction: 69.166.47.134 On: Fri, 05 Dec 2014 06:38:41Muco İboNo ratings yet
- Concept CheckDocument112 pagesConcept CheckMuco İboNo ratings yet
- Materials Science and Engineering - Concept Check SolutionsDocument112 pagesMaterials Science and Engineering - Concept Check SolutionsJuan C Casillas50% (6)
- The Gift of ADHDDocument233 pagesThe Gift of ADHDGerman Rosales Vargas100% (3)
- Unit 4: Alternatives To ImprisonmentDocument8 pagesUnit 4: Alternatives To ImprisonmentSAI DEEP GADANo ratings yet
- New Microsoft Office Word DocumentDocument6 pagesNew Microsoft Office Word DocumentJasmine KumariNo ratings yet
- Strength Exp 2 Brinell Hardness TestDocument13 pagesStrength Exp 2 Brinell Hardness Testhayder alaliNo ratings yet
- Ebook Essential Surgery Problems Diagnosis and Management 6E Feb 19 2020 - 0702076317 - Elsevier PDF Full Chapter PDFDocument68 pagesEbook Essential Surgery Problems Diagnosis and Management 6E Feb 19 2020 - 0702076317 - Elsevier PDF Full Chapter PDFmargarita.britt326100% (22)
- High-Performance Cutting and Grinding Technology For CFRP (Carbon Fiber Reinforced Plastic)Document7 pagesHigh-Performance Cutting and Grinding Technology For CFRP (Carbon Fiber Reinforced Plastic)Dongxi LvNo ratings yet
- The Nation State and Global Order A Historical Introduction To ContemporaryDocument195 pagesThe Nation State and Global Order A Historical Introduction To Contemporaryrizwan.mughal1997100% (1)
- Basic Elements of Rural DevelopmentDocument7 pagesBasic Elements of Rural DevelopmentShivam KumarNo ratings yet
- Pentagram Business PlanDocument13 pagesPentagram Business PlantroubledsoulNo ratings yet
- Sociology of Arts & HumanitiesDocument3 pagesSociology of Arts & Humanitiesgayle gallazaNo ratings yet
- WWW - Nswkendo IaidoDocument1 pageWWW - Nswkendo IaidoAshley AndersonNo ratings yet
- Before The Hon'Ble High Court of Tapovast: 10 Rgnul National Moot Court Competition, 2022Document41 pagesBefore The Hon'Ble High Court of Tapovast: 10 Rgnul National Moot Court Competition, 2022sagar jainNo ratings yet
- John Wick 4 HD Free r6hjDocument16 pagesJohn Wick 4 HD Free r6hjafdal mahendraNo ratings yet
- Apply Study and Learning SkillsDocument58 pagesApply Study and Learning SkillsSelf-DeveloperNo ratings yet
- Ujian Praktek Bhs Inggris WajibDocument4 pagesUjian Praktek Bhs Inggris WajibMikael TitoNo ratings yet
- 1219201571137027Document5 pages1219201571137027Nishant SinghNo ratings yet
- English Solution2 - Class 10 EnglishDocument34 pagesEnglish Solution2 - Class 10 EnglishTaqi ShahNo ratings yet
- Campus Design: School of Architecture & Planning at PondicherryDocument9 pagesCampus Design: School of Architecture & Planning at Pondicherrynadhir sulaimanNo ratings yet
- Systems Analysis and Design 11th Edition Tilley Test BankDocument15 pagesSystems Analysis and Design 11th Edition Tilley Test Banksusanschroederoqdrkxtafn100% (15)
- MTE Radionuclear THYROID FK UnandDocument44 pagesMTE Radionuclear THYROID FK UnandAmriyani OFFICIALNo ratings yet
- Arthropods: Surviving The Frost: Charmayne Roanna L. GalangDocument2 pagesArthropods: Surviving The Frost: Charmayne Roanna L. GalangBabes-Rose GalangNo ratings yet
- Chapter 1Document8 pagesChapter 1Shidan MohdNo ratings yet
- Fire Safety Management - Traditional Building Part#2Document194 pagesFire Safety Management - Traditional Building Part#2Yoyon Haryono100% (1)
- ISCOM5508-GP (A) Configuration Guide (Rel - 02)Document323 pagesISCOM5508-GP (A) Configuration Guide (Rel - 02)J SofariNo ratings yet
- Intro To LodgingDocument63 pagesIntro To LodgingjaevendNo ratings yet
- Molly On The Shore by Percy Grainger Unit StudyDocument5 pagesMolly On The Shore by Percy Grainger Unit Studyapi-659613441No ratings yet
- In Practice Blood Transfusion in Dogs and Cats1Document7 pagesIn Practice Blood Transfusion in Dogs and Cats1何元No ratings yet