You might also like
- February 2013Document52 pagesFebruary 2013sake1978No ratings yet
- Speed. Safety. Style.: CorporateDocument6 pagesSpeed. Safety. Style.: CorporateDila Alvi Febi RivaniNo ratings yet
- FADEC Explained: Benefits and Disadvantages of Full Authority Digital Engine ControlDocument9 pagesFADEC Explained: Benefits and Disadvantages of Full Authority Digital Engine ControlAyaz khanNo ratings yet
- HELICOPTER FLIGHT CONTROL AAP-8 PracticeDocument51 pagesHELICOPTER FLIGHT CONTROL AAP-8 PracticeRichard NneboNo ratings yet
- F-104 Starfighter Propulsion: The GE J-79 Turbojet EngineDocument8 pagesF-104 Starfighter Propulsion: The GE J-79 Turbojet EngineohoooNo ratings yet
- Easa e 111 Tcds Issue 2 - Trent XWBDocument10 pagesEasa e 111 Tcds Issue 2 - Trent XWBrobbertmdNo ratings yet
- Propeller SystemsDocument2 pagesPropeller SystemsSérgio PortuNo ratings yet
- Helicopter Vibration Reduction TechnologiesDocument28 pagesHelicopter Vibration Reduction TechnologiesRichardNo ratings yet
- 280717-Trent 1000 InfographicDocument1 page280717-Trent 1000 InfographicMaciejNo ratings yet
- Heli GeneralDocument15 pagesHeli GeneralUjata IsraelNo ratings yet
- GEnx Technical Manual IndexDocument3 pagesGEnx Technical Manual IndexOsman ParlakNo ratings yet
- GEnx Development Emphasizes Composites, Combustor TechnologyDocument3 pagesGEnx Development Emphasizes Composites, Combustor TechnologySiva KumarNo ratings yet
- Helicopter Airframe NCAA 2Document6 pagesHelicopter Airframe NCAA 2Ujata IsraelNo ratings yet
- In-Flight Simulators and Fly-By-Wire - Light Demonstrators - A Historical Account of International Aeronautical Research (PDFDrive)Document359 pagesIn-Flight Simulators and Fly-By-Wire - Light Demonstrators - A Historical Account of International Aeronautical Research (PDFDrive)spNo ratings yet
- Turbofan SpecificationsDocument5 pagesTurbofan SpecificationsRasoul gholinia kiviNo ratings yet
- 14 Flight Control SystemDocument68 pages14 Flight Control SystemIvan MilosevicNo ratings yet
- Avro RJ General Data BrochureDocument73 pagesAvro RJ General Data BrochureXp MafiaNo ratings yet
- 525 Hydraulic System Optimization For Fly-By-Wire Control Paper AHS F72 ...Document8 pages525 Hydraulic System Optimization For Fly-By-Wire Control Paper AHS F72 ...James Sobel100% (1)
- Sikorsky S76 Brochure 0Document2 pagesSikorsky S76 Brochure 0Syed Iqmal100% (1)
- Jo Kones 2007 No. 3 Vol. 14 CzarneckiDocument6 pagesJo Kones 2007 No. 3 Vol. 14 Czarnecki唐波No ratings yet
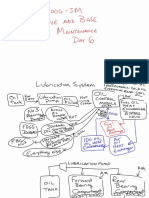
- PW11006-JM: LINE and Base MaintenanceDocument17 pagesPW11006-JM: LINE and Base MaintenanceGenaro RodriguezNo ratings yet
- H2 in AircraftDocument12 pagesH2 in AircraftAnvesh KadimiNo ratings yet
- AVICSYNC Operation ManualDocument29 pagesAVICSYNC Operation ManualLynne Black0% (1)
- NLR Rapport Over Corrosie NH-90Document138 pagesNLR Rapport Over Corrosie NH-90RaulMesaNo ratings yet
- I. Models CF34-10E5 CF34-10E5A1 CF34-10E6 CF34-10E6A1: Maximum ContinuousDocument6 pagesI. Models CF34-10E5 CF34-10E5A1 CF34-10E6 CF34-10E6A1: Maximum ContinuousEstevam Gomes de AzevedoNo ratings yet
- Airframe Ice and Rain ControlDocument18 pagesAirframe Ice and Rain ControlRobertNo ratings yet
- Airbus Training Study Guide JUNE 17Document136 pagesAirbus Training Study Guide JUNE 17thomasNo ratings yet
- Ameco Standard Presentation EDocument23 pagesAmeco Standard Presentation ETuhinNo ratings yet
- Bro ATR42MP 2012 PDFDocument16 pagesBro ATR42MP 2012 PDFfranz_zero2No ratings yet
- Airbus Family Figures Booklet Smartphone FormatDocument31 pagesAirbus Family Figures Booklet Smartphone FormatMuhammad Faizan KhanNo ratings yet
- CFM Doc Leap 1B Co Fda 3 V2Document51 pagesCFM Doc Leap 1B Co Fda 3 V2Paulo SanzNo ratings yet
- B Trent41368ATDocument81 pagesB Trent41368ATArabyAbdel Hamed SadekNo ratings yet
- HPT NozzleDocument19 pagesHPT Nozzlekien Duy PhanNo ratings yet
- CFM56-7B DAC Training ManualDocument25 pagesCFM56-7B DAC Training Manualjivomir100% (1)
- Aero Metals Vertical ArticleDocument8 pagesAero Metals Vertical ArticleRob ZelNo ratings yet
- PRC 349 Specs PDFDocument1 pagePRC 349 Specs PDFAnuj VarshneyNo ratings yet
- Dornier 328jet - Fuel: Fuel Control Panel (Sheet 1 of 2)Document27 pagesDornier 328jet - Fuel: Fuel Control Panel (Sheet 1 of 2)brunner_marak100% (1)
- AS350 Spray Gear 210B - 2002Document1 pageAS350 Spray Gear 210B - 2002Russell GouldenNo ratings yet
- The GE F404 - Engine of The RAAFs New FighterDocument58 pagesThe GE F404 - Engine of The RAAFs New FighterRavishankarNo ratings yet
- Articles - Rafale DealDocument153 pagesArticles - Rafale DealVijay KrishnaNo ratings yet
- Bell 525 Data BrochureDocument2 pagesBell 525 Data BrochureCaesario TanumihardjaNo ratings yet
- bookletATA27 v2Document69 pagesbookletATA27 v2diablohunoNo ratings yet
- Aerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsFrom EverandAerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsNo ratings yet
- Boeing 777-232 Panel Notes Delta Airlines Capt Edgerton FEB2015 95 PagesDocument95 pagesBoeing 777-232 Panel Notes Delta Airlines Capt Edgerton FEB2015 95 PagesericvolmerNo ratings yet
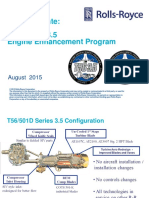
- Series 3 5 Status Update August 2015Document8 pagesSeries 3 5 Status Update August 2015Fayçal MahieddineNo ratings yet
- ATA 49 RedactedDocument106 pagesATA 49 RedactedАлександър ГиневNo ratings yet
- Aerodynamic Design Schemes of The Inlet Guide VaneDocument9 pagesAerodynamic Design Schemes of The Inlet Guide VanedbNo ratings yet
- Axel Humpert, Clive Schley Eurocopter Deutschland GMBH Donauwoerth, GermanyDocument10 pagesAxel Humpert, Clive Schley Eurocopter Deutschland GMBH Donauwoerth, GermanyVishnu SankarNo ratings yet
- CFM56 - 7B 2015 PDFDocument9 pagesCFM56 - 7B 2015 PDFferNo ratings yet
- ENGINE - HPT Blades (72-52-01) - Inspection of HPT Blades - India RegionDocument6 pagesENGINE - HPT Blades (72-52-01) - Inspection of HPT Blades - India RegionPuneet BhardwajNo ratings yet
- Pw11000-Jm: Line and BaseDocument14 pagesPw11000-Jm: Line and BaseGenaro RodriguezNo ratings yet
- Brochure CFM56 Fiches 2017 PDFDocument9 pagesBrochure CFM56 Fiches 2017 PDFpbonnetNo ratings yet
- Airworthiness Directive Schedule: Aeroplanes Hawker Beechcraft Corporation C90A, C90Gt and C90Gti 27 May 2010Document17 pagesAirworthiness Directive Schedule: Aeroplanes Hawker Beechcraft Corporation C90A, C90Gt and C90Gti 27 May 2010midun100% (1)
- 1994 - Flight - PW4084Document6 pages1994 - Flight - PW4084LooserNo ratings yet
- m250 Lessons LearnedDocument6 pagesm250 Lessons LearnedEstevamNo ratings yet
- Cfm56 5b C SeriesDocument10 pagesCfm56 5b C SeriesRobertNo ratings yet
- Surviving Helicopter DitchingDocument6 pagesSurviving Helicopter DitchingbkmaverikNo ratings yet
- Airbus Commercial Aircraft Presentation January 2023Document26 pagesAirbus Commercial Aircraft Presentation January 2023Rastti VillahermosaNo ratings yet
- A Seminar on the Airbus A380Document22 pagesA Seminar on the Airbus A380Chandrashekar HiremathNo ratings yet
- ASA Aft Sump Leak - Customer Exp - 2017 WTTDocument9 pagesASA Aft Sump Leak - Customer Exp - 2017 WTTaliNo ratings yet
- Comparação Eficiência Trator Câmbio Powershift Versus Ivt Ou CVT Melhor Porque Operador Não Tem Que Procurar Marcha AdequadaDocument15 pagesComparação Eficiência Trator Câmbio Powershift Versus Ivt Ou CVT Melhor Porque Operador Não Tem Que Procurar Marcha AdequadaGardenia AndradeNo ratings yet
- Vida Após A Morte Ian Stevenson SciamDocument13 pagesVida Após A Morte Ian Stevenson SciamGardenia AndradeNo ratings yet
- Livre Arbítrio É Real SciamDocument12 pagesLivre Arbítrio É Real SciamGardenia AndradeNo ratings yet
- Mind Matters Transcript Episode 266 Angus Menuge Episode 3pdfDocument10 pagesMind Matters Transcript Episode 266 Angus Menuge Episode 3pdfGardenia AndradeNo ratings yet
- A Consciência Não Precisa de Um Cérebro SciamDocument16 pagesA Consciência Não Precisa de Um Cérebro SciamGardenia AndradeNo ratings yet
- Vários Tipos de Transmissão Inclusive Magnética ExcelenteDocument126 pagesVários Tipos de Transmissão Inclusive Magnética ExcelenteGardenia AndradeNo ratings yet
- Transmissão CVT Ivt Power Split Cammalleri ExcelenteDocument15 pagesTransmissão CVT Ivt Power Split Cammalleri ExcelenteGardenia AndradeNo ratings yet
- Trator Fendt Vario Menor ConsumoDocument9 pagesTrator Fendt Vario Menor ConsumoGardenia AndradeNo ratings yet
- John Polkinghorne Ação Divina DeusDocument23 pagesJohn Polkinghorne Ação Divina DeusGardenia AndradeNo ratings yet
- Mente Consciência Evolução Materialismo Bernardo Kastrup ExcelenteDocument7 pagesMente Consciência Evolução Materialismo Bernardo Kastrup ExcelenteGardenia AndradeNo ratings yet
- Como Experimento Falho Teria Provado Que Livre Arbítrio Não Existe Steve Taylor SciamDocument10 pagesComo Experimento Falho Teria Provado Que Livre Arbítrio Não Existe Steve Taylor SciamGardenia AndradeNo ratings yet
- Câmbio CVT Melhor Rotação Do MotorDocument2 pagesCâmbio CVT Melhor Rotação Do MotorGardenia AndradeNo ratings yet
- Livre Arbítrio Quântica Brian KoberleinDocument13 pagesLivre Arbítrio Quântica Brian KoberleinGardenia AndradeNo ratings yet
- Quântica Será Universo Holograma Dualismo Dualidade SciamDocument17 pagesQuântica Será Universo Holograma Dualismo Dualidade SciamGardenia AndradeNo ratings yet
- Mente Cérebro Não É Nossa Essência Ou Destino ImutávelDocument11 pagesMente Cérebro Não É Nossa Essência Ou Destino ImutávelGardenia AndradeNo ratings yet
- Mente Consciência Dificuldade Explicar Como Células e Sinais Elétricos Podem Gerar Estados Mentais SciamDocument11 pagesMente Consciência Dificuldade Explicar Como Células e Sinais Elétricos Podem Gerar Estados Mentais SciamGardenia AndradeNo ratings yet
- On the Place of Qualia in a Relational UniverseDocument32 pagesOn the Place of Qualia in a Relational UniverseGardenia AndradeNo ratings yet
- Automation & AI - How Machines Are Affecting People and PlacesDocument108 pagesAutomation & AI - How Machines Are Affecting People and PlacesShirinda PradeeptiNo ratings yet
- QUÂNTICA NEWSCIENTIST MUITÍSSIMO BOM LIVRE ARBÍTRIO MICHAEL BROOKS TEXTO CORRIGIDO UM SÓ FÓTON - HTMLDocument12 pagesQUÂNTICA NEWSCIENTIST MUITÍSSIMO BOM LIVRE ARBÍTRIO MICHAEL BROOKS TEXTO CORRIGIDO UM SÓ FÓTON - HTMLGardenia AndradeNo ratings yet
- Câmbio CVT Explicação Força Centrífuga Molas ExcelenteDocument23 pagesCâmbio CVT Explicação Força Centrífuga Molas ExcelenteGardenia AndradeNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Controle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoDocument20 pagesControle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoGardenia AndradeNo ratings yet
- Automation's Impact on Employment LawDocument73 pagesAutomation's Impact on Employment LawGardenia AndradeNo ratings yet
- A Process Toward Total Dependability - Airbus Fly-by-Wire ParadigmDocument11 pagesA Process Toward Total Dependability - Airbus Fly-by-Wire ParadigmGardenia AndradeNo ratings yet
- The Mindful Universe of Henry P. StappDocument16 pagesThe Mindful Universe of Henry P. StappGardenia AndradeNo ratings yet
- HDS Powersports User GuideDocument65 pagesHDS Powersports User GuideNatKThNo ratings yet
- Cobra 4 Far DynacordDocument4 pagesCobra 4 Far DynacordDaniel SfichiNo ratings yet
- Grandparenting - Play With Me! Activities That Make Learning Fun 24 To 36 MonthsDocument3 pagesGrandparenting - Play With Me! Activities That Make Learning Fun 24 To 36 MonthsAmna ArshadNo ratings yet
- Tubo Optiflux 2000 - Manual PDFDocument48 pagesTubo Optiflux 2000 - Manual PDFRonaldo Damasceno EmerichNo ratings yet
- Area and Circumference of CircleDocument17 pagesArea and Circumference of CircleJared VallesNo ratings yet
- Telemecanique Integral 32 Motor StarterDocument52 pagesTelemecanique Integral 32 Motor StarterJaime IxtaNo ratings yet
- Aghora and Tantra: Using Hawan To Appease Indra and YamaDocument3 pagesAghora and Tantra: Using Hawan To Appease Indra and YamaMahesh BadgujarNo ratings yet
- Mswin 9Document388 pagesMswin 9KZNo ratings yet
- Unit Ii, Lesson 4: Qualitative Research in Different Areas of KnowledgeDocument6 pagesUnit Ii, Lesson 4: Qualitative Research in Different Areas of KnowledgeJessy RoseNo ratings yet
- Level 2 Repair: 7-1. Components On The Rear CaseDocument8 pagesLevel 2 Repair: 7-1. Components On The Rear CaseNguyễn Duy LinhNo ratings yet
- MAYTAG MDE28PNCGW0 TechSheet-W10589718-RevADocument8 pagesMAYTAG MDE28PNCGW0 TechSheet-W10589718-RevAAngel MartinezNo ratings yet
- Syllabus 2020Document4 pagesSyllabus 2020asdfghjklNo ratings yet
- Smell and Taste DisordersDocument8 pagesSmell and Taste DisordersAymn MohamedNo ratings yet
- Solid Free Form:: Quilt Flatten Quilt QuiltDocument3 pagesSolid Free Form:: Quilt Flatten Quilt QuiltNaganthrakumar RamaswamyNo ratings yet
- STK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverDocument11 pagesSTK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverGerardo WarmerdamNo ratings yet
- Paracetamol DegradationDocument9 pagesParacetamol DegradationTruyền Phạm MinhNo ratings yet
- Math10 Q2 Mod24 WritingtheEquationofaCircleandDeterminingtheCenterandRadiusofaCircle V3-1Document19 pagesMath10 Q2 Mod24 WritingtheEquationofaCircleandDeterminingtheCenterandRadiusofaCircle V3-1Bridget SaladagaNo ratings yet
- Rajalakshmi Engineering CollegeDocument2 pagesRajalakshmi Engineering CollegebalaNo ratings yet
- Chain Surveying InstrumentsDocument5 pagesChain Surveying InstrumentsSachin RanaNo ratings yet
- Compact and Efficient: Rotary KilnsDocument4 pagesCompact and Efficient: Rotary KilnsNhaca100% (1)
- Class Guide - Soldier Wheelman PDFDocument105 pagesClass Guide - Soldier Wheelman PDFRalph VasquezNo ratings yet
- Lam Sendz MmsDocument8 pagesLam Sendz MmsVíc AltamarNo ratings yet
- Humidity Chamber Tek For Fruiting BRF Cakes - Mushroom Cultivation - Shroomery Message BoardDocument15 pagesHumidity Chamber Tek For Fruiting BRF Cakes - Mushroom Cultivation - Shroomery Message BoardABIYA UNIVERSENo ratings yet
- Hypothesis of The Origin of LanguageDocument6 pagesHypothesis of The Origin of LanguageJefferson KagiriNo ratings yet
- Industrial Pollution Crisis in GujaratDocument2 pagesIndustrial Pollution Crisis in GujaratsmagrurakNo ratings yet
- GNG1105 D Aut2013Document6 pagesGNG1105 D Aut2013oss6000No ratings yet
- Unit 5 Grammar HFDocument7 pagesUnit 5 Grammar HFMilán Benjámin ZámbóNo ratings yet
- Aetna Dental Low DmoDocument9 pagesAetna Dental Low DmoBeau PeskaNo ratings yet
- Lightweight Slab Shoring System - ROYALFRAME50Document6 pagesLightweight Slab Shoring System - ROYALFRAME50Renji Delos ReyesNo ratings yet
- ECI 80 Structural Steel DeckingDocument3 pagesECI 80 Structural Steel Deckingkishore varmaNo ratings yet
- Plant Toxicology, Fourth Edition (Books in Soils, Plants, and The Environment) PDFDocument664 pagesPlant Toxicology, Fourth Edition (Books in Soils, Plants, and The Environment) PDFFahad JavedNo ratings yet