You might also like
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Ina 219Document20 pagesIna 219Garcia F. Marcio100% (1)
- 16 Channel PWM Servo DriverDocument30 pages16 Channel PWM Servo DriverManunoghiNo ratings yet
- Adafruit Ccs811 Air Quality Sensor-1396546Document22 pagesAdafruit Ccs811 Air Quality Sensor-1396546Camilo PradaNo ratings yet
- Adafruit 4 Channel Adc BreakoutsDocument32 pagesAdafruit 4 Channel Adc Breakoutsbinay kumar shahNo ratings yet
- Adafruit Cap1188 BreakoutDocument20 pagesAdafruit Cap1188 BreakoutTechtureGNo ratings yet
- Adafruit Bno055 Absolute Orientation SensorDocument47 pagesAdafruit Bno055 Absolute Orientation SensorMelvinNo ratings yet
- Adafruit Bno055 Absolute Orientation SensorDocument54 pagesAdafruit Bno055 Absolute Orientation SensordiacochemicalsNo ratings yet
- Adafruit - Capacitive Touch SenorDocument20 pagesAdafruit - Capacitive Touch SenorSarah Joy ManimtimNo ratings yet
- Adafruit Vs1053 Mp3 Aac Ogg Midi Wav Play and Record Codec TutorialDocument26 pagesAdafruit Vs1053 Mp3 Aac Ogg Midi Wav Play and Record Codec TutorialAlsemiro Alves JrNo ratings yet
- Adafruit Si5351 Clock Generator BreakoutDocument25 pagesAdafruit Si5351 Clock Generator BreakoutDirson Volmir WilligNo ratings yet
- 1 8 TFT DisplayDocument69 pages1 8 TFT DisplayBen sayari Mohamed AmineNo ratings yet
- Adafruit Si5351 Clock Generator BreakoutDocument30 pagesAdafruit Si5351 Clock Generator BreakoutLU8DIW Roberto MartinezNo ratings yet
- The Things Network For FeatherDocument38 pagesThe Things Network For FeatherRealidad VirtualNo ratings yet
- Adafruit Max31856 Thermocouple AmplifierDocument20 pagesAdafruit Max31856 Thermocouple AmplifierAnonymous WOsw0ywf8eNo ratings yet
- 2 2 TFT DisplayDocument48 pages2 2 TFT DisplayAbdullah ZahidNo ratings yet
- Adafruit Hdc1008 Temperature and Humidity Sensor BreakoutDocument18 pagesAdafruit Hdc1008 Temperature and Humidity Sensor Breakoutİsmail KıyıcıNo ratings yet
- Adafruit Huzzah Esp8266 BreakoutDocument48 pagesAdafruit Huzzah Esp8266 Breakoutwaqasahmed1988100% (1)
- Adafruit Picowbell Adalogger For PicoDocument44 pagesAdafruit Picowbell Adalogger For PicoJohn EganNo ratings yet
- Adafruit vl53l0x Micro Lidar Distance Sensor BreakoutDocument23 pagesAdafruit vl53l0x Micro Lidar Distance Sensor Breakoutjeh arxNo ratings yet
- Adafruit Mcp23017 I2c Gpio ExpanderDocument21 pagesAdafruit Mcp23017 I2c Gpio Expanderdiamondnavy91No ratings yet
- Adafruit Huzzah32 Esp32 FeatherDocument57 pagesAdafruit Huzzah32 Esp32 FeatherSaul CovalNo ratings yet
- Adafruit Proto Shield ArduinoDocument39 pagesAdafruit Proto Shield ArduinoTeerajet ChumrunworakiatNo ratings yet
- Sensor Umidade ArduinoDocument22 pagesSensor Umidade ArduinoVictor Jose Laurindo FerreiraNo ratings yet
- 32x16 32x32 RGB Led MatrixDocument44 pages32x16 32x32 RGB Led MatrixCarlos Esteban VirziNo ratings yet
- ArduinoDocument120 pagesArduinoSomdutt Acharya100% (2)
- Adafruit Huzzah32 Esp32 FeatherDocument46 pagesAdafruit Huzzah32 Esp32 FeatherJorge AdrianNo ratings yet
- 4885 Sensirion SHT40 SensorDocument14 pages4885 Sensirion SHT40 SensorCouchisemNo ratings yet
- Adafruit vl53l0x Micro Lidar Distance Sensor BreakoutDocument21 pagesAdafruit vl53l0x Micro Lidar Distance Sensor BreakoutJorge AdrianNo ratings yet
- Adafruit lsm9ds1 Accelerometer Plus Gyro Plus Magnetometer 9 Dof BreakoutDocument18 pagesAdafruit lsm9ds1 Accelerometer Plus Gyro Plus Magnetometer 9 Dof BreakoutConejoSinPompon gomaNo ratings yet
- Adafruit 9 Dof Orientation Imu Fusion Breakout Bno085Document36 pagesAdafruit 9 Dof Orientation Imu Fusion Breakout Bno085Иван ЧопейNo ratings yet
- Making Laser Engraving Circuit Boards in ElectronicsDocument13 pagesMaking Laser Engraving Circuit Boards in ElectronicsjackNo ratings yet
- adafruit-feather-m0-radio-with-lora-radio-moduleDocument81 pagesadafruit-feather-m0-radio-with-lora-radio-moduleJuliene DaviNo ratings yet
- Workshop On Wearable TechDocument71 pagesWorkshop On Wearable TechThomas SabuNo ratings yet
- Introduction To Arduino, Pictoblox and Evive.Document72 pagesIntroduction To Arduino, Pictoblox and Evive.Thatukuru Lakshman100% (2)
- Mavric-Iib: Mega AVR Integrated Controller II Revision B Technical ManualDocument17 pagesMavric-Iib: Mega AVR Integrated Controller II Revision B Technical ManualGeorge MecseryNo ratings yet
- Adafruit PCA9685 16-Channel Servo Driver: Created by Bill EarlDocument34 pagesAdafruit PCA9685 16-Channel Servo Driver: Created by Bill EarlAbdallah MiidouneNo ratings yet
- SpecificationsDocument5 pagesSpecificationsgebretensaymamu11No ratings yet
- Ready Avr Manual v101 1485340Document25 pagesReady Avr Manual v101 1485340Beltazor HellboyNo ratings yet
- This Document Explains How The SC12 IPC@CHIP Is Put Into Operation. The DK40 Evaluation Board Is Used Through This ManualDocument16 pagesThis Document Explains How The SC12 IPC@CHIP Is Put Into Operation. The DK40 Evaluation Board Is Used Through This ManualHans-Joerg KasperNo ratings yet
- Adafruit Mma8451 Accelerometer BreakoutDocument22 pagesAdafruit Mma8451 Accelerometer BreakoutIvory VyloveNo ratings yet
- AVR TutorialDocument11 pagesAVR Tutorialletanbaospkt06No ratings yet
- Using Arduino UnoDocument15 pagesUsing Arduino UnojlNo ratings yet
- Introducting Itsy Bitsy 32u4Document21 pagesIntroducting Itsy Bitsy 32u4Pavan UNo ratings yet
- Adafruit Drv2605 Haptic Controller BreakoutDocument20 pagesAdafruit Drv2605 Haptic Controller BreakoutNoelle MorganNo ratings yet
- 3 NODEMCU 1st LectureDocument84 pages3 NODEMCU 1st LectureSukhpreet SinghNo ratings yet
- How To Make Arduino On Breadboard - Step by Step Instructions - Homemade Circuit Projects PDFDocument12 pagesHow To Make Arduino On Breadboard - Step by Step Instructions - Homemade Circuit Projects PDFKuldeep SinghNo ratings yet
- Introduction To Arduino Programming: Jinasena Innovation & Technology Institute - EkalaDocument60 pagesIntroduction To Arduino Programming: Jinasena Innovation & Technology Institute - EkalaSanuji KalhanNo ratings yet
- PORT INTERFACING: Connecting External Devices to ComputersDocument20 pagesPORT INTERFACING: Connecting External Devices to ComputersChiradeep GuptaNo ratings yet
- 14 Segment Alpha Numeric Led Featherwing PDFDocument36 pages14 Segment Alpha Numeric Led Featherwing PDFDeepak S SNo ratings yet
- Adafruit Ultimate Gps Logger ShieldDocument30 pagesAdafruit Ultimate Gps Logger ShieldMarc BonetNo ratings yet
- Microcontroller Board Mit USB-Kabel - ENDocument28 pagesMicrocontroller Board Mit USB-Kabel - ENmath.35No ratings yet
- BotboarduinomanualDocument8 pagesBotboarduinomanualAlvaroNo ratings yet
- Embedded Systems CurriculumDocument3 pagesEmbedded Systems CurriculumginikannaobiNo ratings yet
- Xc800 App OcdsDocument22 pagesXc800 App OcdskrrishNo ratings yet
- IT WorkshopDocument21 pagesIT WorkshopVishal ReddyNo ratings yet
- First Steps With The Hardware (Base Kit)Document27 pagesFirst Steps With The Hardware (Base Kit)amrina aliNo ratings yet
- Internet of Things - Open Source Home Automation Project Using Arduino UNO + Ethernet ShieldDocument22 pagesInternet of Things - Open Source Home Automation Project Using Arduino UNO + Ethernet ShieldWillians MartinsNo ratings yet
- Adafruit ds3231 Precision RTC BreakoutDocument21 pagesAdafruit ds3231 Precision RTC BreakoutsalihuNo ratings yet
- CD40106B CMOS Hex Schmitt-Trigger Inverters: 1 Features 3 DescriptionDocument33 pagesCD40106B CMOS Hex Schmitt-Trigger Inverters: 1 Features 3 DescriptionmegadaveNo ratings yet
- Guide to Common Oscillator CircuitsDocument29 pagesGuide to Common Oscillator CircuitsIonuț UilăcanNo ratings yet
- RF Electronics Chapter on Oscillator PrinciplesDocument17 pagesRF Electronics Chapter on Oscillator PrinciplesJos1No ratings yet
- Negative Resistance Oscillators: Ceramic Oscillator (CRO) Dielectric Oscillator (DRO)Document50 pagesNegative Resistance Oscillators: Ceramic Oscillator (CRO) Dielectric Oscillator (DRO)megadaveNo ratings yet
- Analog CircuitsDocument92 pagesAnalog Circuitsmaganga magangaNo ratings yet
- HMC C004 AnalogDevicesDocument6 pagesHMC C004 AnalogDevicesmegadaveNo ratings yet
- HMC C024 AnalogDevicesDocument6 pagesHMC C024 AnalogDevicesmegadaveNo ratings yet
- INA219 Zerø-Drift, Bidirectional Current/Power Monitor With I C InterfaceDocument38 pagesINA219 Zerø-Drift, Bidirectional Current/Power Monitor With I C InterfaceDoping LabsNo ratings yet
- Skema Ic BCMDocument11 pagesSkema Ic BCMArief Efendi (Ariev7xx)No ratings yet
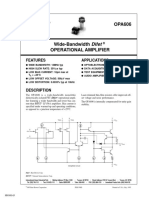
- Difet: Features ApplicationsDocument13 pagesDifet: Features ApplicationsmegadaveNo ratings yet
- 33 - 47 GHZ Wide Band Driver Amplifier Tga4522-Epu: Key FeaturesDocument10 pages33 - 47 GHZ Wide Band Driver Amplifier Tga4522-Epu: Key FeaturesmegadaveNo ratings yet
- Wide Supply Range, Rail-to-Rail Output Instrumentation Amplifier AD8227Document24 pagesWide Supply Range, Rail-to-Rail Output Instrumentation Amplifier AD8227megadaveNo ratings yet
- Cloud Computing Bangla-Ragib HassanDocument19 pagesCloud Computing Bangla-Ragib HassanShah Shishir100% (1)
- Capacitor BasicsDocument2 pagesCapacitor BasicsGarima PantNo ratings yet
- Calculation Sheet For Ramset AnchorsDocument7 pagesCalculation Sheet For Ramset AnchorsJohnMichaelM.ManaloNo ratings yet
- Control your EV charger and track usage from anywhereDocument2 pagesControl your EV charger and track usage from anywhereMayur DeokarNo ratings yet
- Impressed Voltager TestDocument8 pagesImpressed Voltager TestSiddhesh Kamat MhamaiNo ratings yet
- Sampling Distributions Solved QuestionsDocument4 pagesSampling Distributions Solved Questionsrangoli maheshwariNo ratings yet
- Steel - Chapter 4Document18 pagesSteel - Chapter 4Kristoffer NaridoNo ratings yet
- 1D Spring System SimulationDocument47 pages1D Spring System SimulationSandeep GogadiNo ratings yet
- General Notices and Requirements: 2.20. Official ArticlesDocument12 pagesGeneral Notices and Requirements: 2.20. Official ArticlesZulfa A. Sa'adahNo ratings yet
- To Determine The Concentration of Sucrose Solution That Is Isotonic To The Cell Sap of Mango.Document2 pagesTo Determine The Concentration of Sucrose Solution That Is Isotonic To The Cell Sap of Mango.Jason SiahNo ratings yet
- XP EnergyDocument9 pagesXP Energylaurent lebourgeoisNo ratings yet
- Admasu TekleDocument55 pagesAdmasu TekleFalmata AtNo ratings yet
- Buoyancy, Stability and Masses Subjected To AccelerationDocument12 pagesBuoyancy, Stability and Masses Subjected To AccelerationandreinaNo ratings yet
- OHAUS Navigator BalanceDocument49 pagesOHAUS Navigator BalanceHanka Kubik100% (2)
- Process Industry Practices VesselsDocument36 pagesProcess Industry Practices VesselstmaNo ratings yet
- Parallels RAS GPU Accelerated Application PublishingDocument42 pagesParallels RAS GPU Accelerated Application PublishingRichardNo ratings yet
- 6 - Numerical Methods For Chemical Engineers With Matlab ApplicationsDocument87 pages6 - Numerical Methods For Chemical Engineers With Matlab ApplicationsGonzalo1959No ratings yet
- Alternating Current Circuits and Electromagnetic Waves ExplainedDocument32 pagesAlternating Current Circuits and Electromagnetic Waves ExplainedKristineNo ratings yet
- Homework Solution: Investment Science: Solution Problem 5.2: The RoadDocument7 pagesHomework Solution: Investment Science: Solution Problem 5.2: The RoadAbdu AbdoulayeNo ratings yet
- Inventory Record - FinalDocument6 pagesInventory Record - FinalParag WadekarNo ratings yet
- Malware PersistentDocument57 pagesMalware PersistentPhạmPhúQuíNo ratings yet
- 2 - ARM Parallel IO 123Document42 pages2 - ARM Parallel IO 123Nishit KatiraNo ratings yet
- MIND Seamap GunLink 2500Document4 pagesMIND Seamap GunLink 2500Steve HeartNo ratings yet
- Uts MetpenDocument3 pagesUts MetpenJihan NazifaNo ratings yet
- Gabion Walls Presentation FijiDocument38 pagesGabion Walls Presentation FijiHuy ChungNo ratings yet
- Acoustic Doppler Effect With Universal Counter: (Item No.: P2150405)Document7 pagesAcoustic Doppler Effect With Universal Counter: (Item No.: P2150405)Muhammad IshfaqNo ratings yet
- MKKL 2063Document10 pagesMKKL 2063Anas Abd RahmanNo ratings yet
- 0.0.0.0 Lab - Configuring Devices For Use With Cisco Configuration Professional (CCP) 2.5 - InstructorDocument12 pages0.0.0.0 Lab - Configuring Devices For Use With Cisco Configuration Professional (CCP) 2.5 - InstructorSalem TrabelsiNo ratings yet
- Carbon and Its CompoundDocument6 pagesCarbon and Its CompoundKartik meenaNo ratings yet
- VSBXDocument33 pagesVSBXDylan HenryNo ratings yet